


Scientific journal
Modern high technologies
ISSN 1812-7320
"Перечень" ВАК
ИФ РИНЦ = 1,279
Experimental studies of an intelligent control system of an internal combustion engine based on fuzzy dynamic models

В настоящее время существуют проблемы, которые невозможно решить традиционными методами теории автоматического управления. Часто это происходит в больших и сложных объектах и системах, где алгоритмы не могут быть сформулированы или выполнены в неопределенных ситуациях. Такими средствами и системами обычно управляют люди (операторы), которые принимают решения. Этот тип системы управления называется системой управления на основе знаний, или интеллектуальной системой управления.
Анализ последних публикаций в данной области [1–3] показал, что интеллектуальные системы, построенные на основе нечетких нейронных сетей, широко распространены на сегодняшний день. Данные системы в большинстве строятся на архитектурах ANFIS и NNFLC [4, 5]. Архитектура ANFIS [6–9] (Adaptive Network Based Fuzzy Inference System) используется в случаях необходимости нейронной сети с единственным выходом и несколькими входами. Причем термы входных лингвистических переменных описываются стандартными функциями принадлежности, а термы выходной переменной представляются линейной или постоянной функцией принадлежности. Архитектура NNFLC [10–13] (Neurons Network Fuzzy Logic Controller) обладает отличительной особенностью – разделение структуры на слои, каждый из которых обладает своим функционалом.
В ряде работ в качестве регулятора используется гибридная нечеткая логика [14, 15], которая отличается от обыкновенной нечеткой логики тем, что значение управляемого сигнала описывается аппаратом нечеткой логики, однако функции принадлежности настраиваются с помощью алгоритмов обучения нейронных сетей. В настоящей работе отдается предпочтение архитектуре NNFLC за счет ее гибкости и возможности получить множество выходных переменных.
Цель исследования: исследование системы управления параметрами двигателя внутреннего сгорания на основе нечеткой логики управления.
Материалы и методы исследования
В основе создания интеллектуальных систем управления лежат методы ситуационного, событийного управления и инновационные интеллектуальные информационно-технологические процессы обработки информации [15]. Принцип работы системы управления двигателем основан на комплексном управлении величиной крутящего момента двигателя внутреннего сгорания. В зависимости от режима работы двигателя и интенсивности система способна изменять величину крутящего момента. Существует два способа регулирования величины крутящего момента: изменяя угол опережения зажигания и изменяя количество топливно-воздушной смеси в цилиндре.
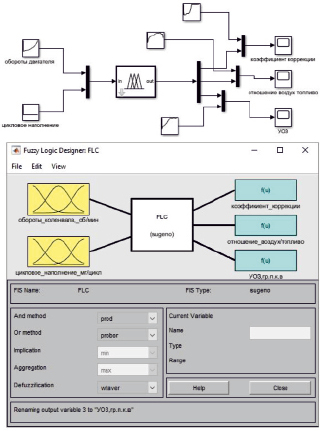
Рис. 1. Имитационная модель и структура блока fuzzy logic
В соответствии с задачей разработана компьютерная модель в программном комплексе Matlab/Simulink (рис. 1). Система управления работает следующим образом: на вход блока fuzzy logic controller с помощью блока интерполированной повторяющейся последовательности подается аппроксимированное значение параметра оборотов двигателя и циклового наполнения, полученные экспериментально с датчиков двигателя внутреннего сгорания. Для проверки работоспособности представленной схемы используются блоки аппроксимирующей функции желаемого отклика. На выходе получены три регулируемых параметра: угол опережения зажигания (УОЗ) для экономичного режима работы, отношение воздух – топливо и коэффициент коррекции. Для наглядного представления разницы между аппроксимированным значением желаемого отклика и выходного значения блока fuzzy logic controller используется блок mux.
В полученной системе в качестве алгоритма нечеткого вывода применяется алгоритм Сугено (Sugeno).
На вход блока фаззификатор поступают четкие входные значения, на выходе получаются нечеткие значения. Блок база знаний хранит в себе информацию по нечетким отношениям входа-выхода. Также данный блок обладает функцией принадлежности, посредством которой идентифицирует переменные на входе для базы нечетких правил, а переменные – на выходе для контролируемого объекта. Блок база правил хранит информацию о работе процесса домена. На вход блока дефаззификатор поступают нечеткие входные значения, на выходе получаются четкие значения.
Составление правил. Шаг 1. Пространства входных и выходных данных разделяются на области. Принимаются допущения, при которых пределы каждой переменной известны. По максимальному и минимальному значению определяются отрезки допустимых значений. Для входной переменной обозначенной как обороты двигателя равен {600, 7650}. Для выходной переменной УОЗ равен {2, 58.5}, для переменной коэффициент коррекции равен {0, 3.98}, для расхода воздуха – {13.1, 16.7}.
Каждый отрезок разделим на N областей, причем значение N для каждой переменной подбирается индивидуально, а отрезки могут иметь одинаковую или различную длину. Значение функции для оборотов двигателя показано на рис. 2.
Шаг 2. Далее составляется база правил. Для каждой из трех выходных переменных база правил будет составляться индивидуально. Для того чтобы составить базу правил, необходимо иметь таблицы зависимости выходных значений от входных. База правил определяется следующим образом:
– Правило 1: если x1 есть P1 и x2 есть P1, то y есть P12. Где x1 и x2 значение входных параметров, принадлежащих P1 и P1, а y значение выходного параметра, принадлежащее множеству P12. Таким образом, составляется таблица с правилами, представленная в таблице для каждого из параметров.
Шаг 3. Дефаззификация в данном нечетком контроллере осуществляется методом взвешенного среднего.
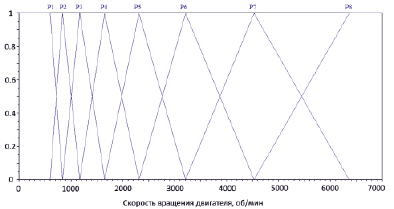
Рис. 2. График значений входной функции оборотов двигателя
Таблица правил для циклового наполнения
|
Скорость вращения двигателя Цикловое наполнение |
P1 |
P2 |
P3 |
P4 |
P5 |
P6 |
|
P1 |
P12 |
P15 |
P21 |
P22 |
P22 |
P23 |
|
P2 |
P14 |
P21 |
P21 |
P25 |
P29 |
P29 |
|
P3 |
P11 |
P16 |
P18 |
P22 |
P27 |
P27 |
|
P4 |
P2 |
P12 |
P18 |
P22 |
P25 |
P26 |
|
P5 |
P1 |
P9 |
P15 |
P22 |
P23 |
P23 |
|
P6 |
P1 |
P10 |
P15 |
P22 |
P23 |
P23 |
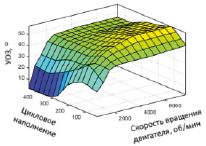
Рис. 3. Зависимость УОЗ от оборотов двигателя и циклового наполнения

Рис. 4. Индикация угла опережения зажигания на стенде
Результаты исследования и их обсуждение
В результате моделирования получены зависимости отношения воздух – топливо от оборотов двигателя и циклового наполнения, УОЗ от оборотов двигателя и циклового наполнения и коэффициент коррекции от оборотов двигателя и циклового наполнения. Данные графики зависимости значений выходных параметров от показаний датчиков представлены на рис. 3.
Экспериментальные исследования проводились на стенде, который состоит из частотного привода, магнитоэлектрических датчиков, системы управления двигателем, построенной на микроконтроллере STM32F303, генератора с разрядником.
Данный стенд позволяет наглядно исследовать угол опережения зажигания (рис. 4). Подключение стенда производится посредством высоковольтных проводов от катушки зажигания. Ротор генератора выполняет функцию вращающегося разрядника.
По итогам экспериментальных исследований на стенде получена кривая зависимости УОЗ от скорости вращения двигателя (рис. 5).
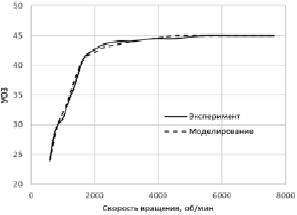
Рис. 5. Зависимость угла опережения зажигания от скорости вращения двигателя
Экспериментальная кривая УОЗ снималась по вращающемуся искровому разряднику в зависимости от оборотов. Важно отметить, что искрообразование было устойчивым, без пропусков зажигания. Из графика можно судить об адекватности результатов экспериментального исследования, расхождение составляет не более 4 %.
Заключение
Разработана система управления параметрами двигателя с помощью блока fuzzy logic control. Составлена база правил для каждой из трех выходных переменных. В созданной модели управление параметрами двигателя было достигнуто путем аппроксимации функций зависимости выходных параметров от показаний датчиков. Проанализировано расхождение результатов имитационного моделирования и экспериментального исследования, которое составило не более 4 %.
Работа выполнена в рамках гранта республики Башкортостан № 24ГР.
Библиографическая ссылка
Ямалов И.И., Обуденов М.С., Фаизова Р.Р. Экспериментальные исследования интеллектуальной системы управления двигателем внутреннего сгорания на основе нечетких динамических моделей // Современные наукоемкие технологии. 2020. № 11-2. С. 326-330;URL: https://top-technologies.ru/en/article/view?id=38382 (дата обращения: 21.06.2026).
DOI: https://doi.org/10.17513/snt.38382