


Scientific journal
Modern high technologies
ISSN 1812-7320
"Перечень" ВАК
ИФ РИНЦ = 1,279
SYNTHESIS OF STABILIZING CONTROL IN THE GENERATION OF MULTI-BODY SYSTEMS PROGRAM MOTIONS

Появление многотельных систем (MBS) [1] сложной конструкции обуславливает разработку и модификацию методов управления их пространственным движением. Важной задачей является обеспечение асимптотической устойчивости програм- мных траекторий управляемого объекта.
В общем виде динамика MBS модели описывается уравнениями

где  – вектор обобщенных координат объекта управления (МBС модель),
– вектор обобщенных координат объекта управления (МBС модель),  – вектор обобщенных координат генератора движения, первое уравнение системы описывает МBС модель, второе – генератор траекторий движения, третье – связи внутри МBС модели, четвертое – связи между генератором и МBС моделью.
– вектор обобщенных координат генератора движения, первое уравнение системы описывает МBС модель, второе – генератор траекторий движения, третье – связи внутри МBС модели, четвертое – связи между генератором и МBС моделью.
Такие системы управления находят свое применение в решении задачи синтеза управляемого движения шагающими роботами. Их программное движение включает в себя траекторию движения точек корпуса и траекторию движения концевых точек шагающих движителей [2]. Кинематические характеристики перемещения, нахождение усилий в приводах под действием внешних нагрузок, инерционных сил определяют параметры управляющих воздействий для получения заданного движения пространственной многотельной системы.
В данной работе рассматриваются генераторы движения с решением в форме асимптотически устойчивых предельных циклов (рис. 1). Предложенный в работе подход опирается на теоремы В.И. Зубова о стабилизации систем в окрестности заданных многообразий и требует получения непрерывных гладких функций управления посредством метода функций Ляпунова.
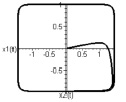
Рис. 1. Устойчивый предельный цикл
Для описания генераторов движения используются близкие к программной траектории аналитические функции, улучшающие качество управляемого движения звеньев объекта управления [3]. Особый интерес представляет исследование численного решения многотельных систем с такими генераторами при различных типах связей между МBС моделью и генератором движения [4].
Результаты проведенных исследований можно использовать при разработке антропоморфных роботов [2], при проектировании детектирующих устройств переходных процессов движения по траекториям.
Структура управления генератора предельных циклов
Рассмотрим задачу стабилизации двух нелинейно-связанных подсистем:
 (1)
(1)
где  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  при
при  ,
, 
Требуется построить внутрисистемные управления  , обеспечивающие существование ω – предельных множеств в подпространстве состояний
, обеспечивающие существование ω – предельных множеств в подпространстве состояний  , i = 1, 2, каждой из подсистем системы управления [5].
, i = 1, 2, каждой из подсистем системы управления [5].
Вывод соотношений на параметры стабилизирующего управления
Будем искать управляющие функции  в следующем виде:
в следующем виде:

где i = 1, 2.
Рассмотрим две кривые  ,
,  , где ϑ – гомеоморфизм
, где ϑ – гомеоморфизм  , i = 1, 2.
, i = 1, 2.
Определим параметры внутрисистемных управлений  , используя условие инвариантности данных кривых. Введем
, используя условие инвариантности данных кривых. Введем
 – область в
– область в  , тогда граница области в фазовом пространстве i-й подсистемы будет
, тогда граница области в фазовом пространстве i-й подсистемы будет  , где i = 1, 2.
, где i = 1, 2.
Получим достаточные условия инвариантности кривых  и
и  из уравнений
из уравнений
 (2)
(2)
 (3)
(3)
где  =
=  ,
,  =
=  ,
,
 – оператор векторного поля системы (1), где
– оператор векторного поля системы (1), где





 ,
,
 – вектор состояния системы (1).
– вектор состояния системы (1).
Расчет параметров управления, обеспечивающих инвариантность кривой 
Подставим функцию  в уравнение инвариантности (2):
в уравнение инвариантности (2):
Преобразуем полученные выражения, раскрыв скобки и сгруппировав слагаемые при степенях  ,
,  ,
,  ,
, 


 где r = m, k, l:
где r = m, k, l:




где  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  . Оператор векторного поля системы равен нулю на кривой, определяемой уравнением
. Оператор векторного поля системы равен нулю на кривой, определяемой уравнением
 (4)
(4)
при условии  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  , P1 = 1. Здесь
, P1 = 1. Здесь  ,
,  . Условие P1 = 1 выполняется при
. Условие P1 = 1 выполняется при  . Кривая (4) является
. Кривая (4) является  .
.
Для обеспечения инвариантности только одной линии уровня  =
=  функции F1 полная производная системы обратится в ноль на кривой
функции F1 полная производная системы обратится в ноль на кривой  при выполнении следующих условий
при выполнении следующих условий
 ,
,  ,
,  ,
,
 ,
,  ,
,  ,
,
где  ,
,  ,
,  .
.
Повторив подобный расчет, установим, что существование подсистемы с инвариантной кривой  приводит к инвариантности кривой
приводит к инвариантности кривой  у второй подсистемы при выполнении определенных условий на параметры управляющих функций.
у второй подсистемы при выполнении определенных условий на параметры управляющих функций.
Таким образом, коэффициенты внутрисистемных управлений  будут определяться по формулам
будут определяться по формулам

где i, j = 1, 2, j = i.
Кривые  и
и  являются ω – предельными множествами в подпространствах
являются ω – предельными множествами в подпространствах  и
и  соответственно.
соответственно.
Численное моделирование
Построенная в работе модель генератора движения относится к системам автоколебательного типа. В подпространстве каждой подсистемы наблюдается процесс стабилизации траекторий в окрестности инвариантного асимптотически устойчивого многообразия [6]. Выполнено численное моделирование такой системы в условиях параметрического изменения управляющего воздействия. Качественное исследование ее решения подтвердило действенность приведенной в работе методики аналитического конструирования генераторов движения.
Согласно соотношениям синтеза при достаточно широком диапазоне изменения значений коэффициентов управляющих функций показано существование областей устойчивого поведения системы в окрестности режима (рис. 2).
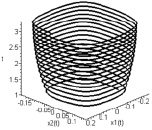
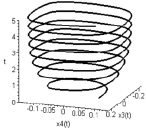
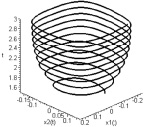
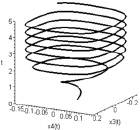
Рис. 2. Интегральные трубки в подпространствах  и
и 
По иллюстрациям численного моделирования можно определить время выхода интегральных кривых на режим устойчивых периодических колебаний.
В соответствующих подпространствах системы показано существование возможности одновременного выхода процессов на заданный режим.
Заключение
В работе получены стабилизирующие управления для генерации программных движений MBS модели. Предложенный подход позволяет решать задачу синтеза управляемого движения многотельных систем по предписанным траекториям. Методика интегрирования генераторов движения в динамику многотельных систем дает возможность реализовать перемещение звеньев объекта управления с помощью полученных генераторов предельных циклов.
Библиографическая ссылка
Полянина А.С. СИНТЕЗ СТАБИЛИЗИРУЮЩЕГО УПРАВЛЕНИЯ В ГЕНЕРАЦИИ ПРОГРАММНЫХ ДВИЖЕНИЙ МНОГОТЕЛЬНЫХ СИСТЕМ // Современные наукоемкие технологии. 2020. № 2. С. 45-50;URL: https://top-technologies.ru/en/article/view?id=37913 (дата обращения: 03.07.2026).
DOI: https://doi.org/10.17513/snt.37913