


Scientific journal
Modern high technologies
ISSN 1812-7320
"Перечень" ВАК
ИФ РИНЦ = 1,279
THE FORMALIZATION OF THE PRINCIPLES OF OPERATION OF THE CONTROL SYSTEM POWER PLANT OF TWIN-ENGINE AIRCRAFT WITH TURBOJET ENGINES AND MINIMISE THE ASYMMETRY OF THRUST AT TAKEOFF AND CLIMB

Проблема минимизации «разнотяговости» двухконтурных турбореактивных двигателей силовой установки самолёта стала в России актуальной с 1992 г. после авиакатастрофы самолёта «МиГ-31» вследствие «разнотяговости» его двигателей, которая возникла из-за невключения режима «Полный форсаж» одного из них при нарушении электрической цепи по причине некачественности её пайки на заводе-изготовителе. Но минимизировать «разнотяговость» пары двигателей для силовой установки самолёта нужно и должно ещё на заводе-изготовителе по результатам стендовых испытаний с помощью методики минимизации «разнотяговости» и асимметрии тяги двигателей силовой установки двухдвигательного самолета в многомерной постановке задачи автоматического контроля асимметрии тяги [1, 2]. Причем уменьшать асимметрию тяги двигателей силовой установки самолёта в полёте, обусловленную их минимизированной на заводе-изготовителе, но не до конца ликвидированной «разнотяговостью», можно и должно, если реализовать в системе управления силовой установкой (СУ СУ) этого самолета программу управления по частоте вращения ротора низкого давления (РНД) n1 (n1 ± δn1 = const) и программу управления по частоте вращения ротора компрессора высокого давления (РКВД) n2 (n2 ± δn2 = const), а управляемые параметры n1 и n2 задействовать в качестве параметров тяги и вводить через эту СУ СУ их особые поправки (малые отклонения) на основе того же метода минимизации «разнотяговости» и асимметрии тяги однотипных двигателей [3, 4].
Цель исследования: формализация принципов функционирования СУ СУ самолёта с двумя двухконтурными турбореактивными двигателями при их безотказной работе и минимизации асимметрии тяги его двигателей с минимальной «разнотяговостью».
Материалы и методы исследования
Материалом для исследования является СУ СУ самолета с двумя двухконтурными турбореактивными двигателями.
Методами исследования являются методы математической статистики и минимизации «разнотяговости» и асимметрии тяги двух двухконтурных турбореактивных двигателей силовой установки самолета [1, 3, 4].
Структура СУ СУ самолёта и минимизации асимметрии тяги двух его исправных ТРДД с минимальной «разнотяговостью»
Минимизировать асимметрию тяги исправных двигателей силовой установки самолёта в полёте позволяет такая система управления этой установкой, которая автоматически осуществляет определение снижения тяги исправного двигателя и исключение недопустимых включений режима повышенной тяги (РПТ) в условиях взлёта самолёта, если на нём установлены двигатели, которые успешно прошли на заводе-изготовителе глубокое тестирование технического состояния после стендовых испытаний в условиях серийного производства и ужесточённый выходной контроль.
Функциональная схема предлагаемой СУ СУ самолёта с двумя двигателями
При реализации в СУ СУ самолёта программ управления n1 ± δn1 = const и n2 ± δn2 = const, снижение тяги двигателей при взлёте определяется по уменьшению частоты вращения РНД n1 и частоты вращения РКВД n2 ниже заданных значений соответственно частотам вращения n1зад и n2зад, а минимизация асимметрии тяги эти двигателей при взлёте выполняется путём введения поправок управляемых параметров n1 и n2 по методу минимизации «разнотяговости» двигателей в многомерной постановке задачи автоматического контроля асимметрии тяги [4].
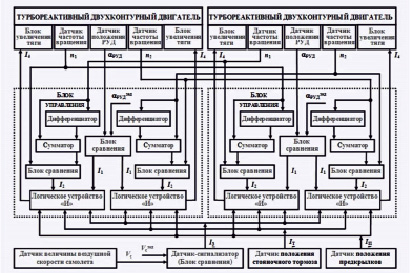
В предлагаемой СУ СУ самолёта реализуются программы управления по частотам вращения роторов (n1 + δn1 = const и n2 + δn2 = const), а в качестве параметров тяги применяются управляемые параметры n1 и n2. Управление двигателями осуществляется блоками управления по сигналам от датчиков положения рычагов управления двигателями (РУД) αРУД и датчиков частот вращения роторов двигателей n1 и n2. Суммарные сигналы частоты вращения РНД n1 и её 1-ой производной dn1/dt в виде n1 ± С1·dn1/dt и частоты вращения РКВД n2 и её 1-й производной dn2/dt в виде n2 ± С2·dn2/dt помогают определить «разнотяговость» и асимметрию тяги двигателей в условиях взлёта и набора высоты. При этом коэффициенты С1, С2 в поправках δn1 = С1·dn1/dt и δn2 = С2·dn2/dt зависят от характеристик этих роторов. Функциональная схема такой СУ СУ представлена на рисунке.
Нахождению механизации крыла самолёта во взлётной конфигурации соответствует дискретный сигнал «Предкрылки не убраны» IТ. После взлёта осуществляется изменение механизации крыла в полётную конфигурацию и снимается дискретный сигнал IТ, что исключает при взлете включение РПТ. Выключению стояночного тормоза самолёта перед началом разбега по взлётно-посадочной полосе соответствует дискретный сигнал «Стояночный тормоз самолёта выключен» IП, который до конца полёта не снимается. Если измеренное значение положения РУД αРУД ниже заданного значения αРУДзад, то выполняется снятие РПТ изменением положения РУД [5, 6].
Дискретные сигналы с датчиков частоты вращения РНД n1 и датчиков частоты вращения РКВД n2 одновременно подаются на блоки управления двигателями, где в блоках сравнения значений положения РУД происходит сравнение измеренных значений положения РУД αРУД с его заданным значением αРУДзад, соответствующим режиму полёта. Если αРУД > αРУДзад, то на выходе этих блоков формируются дискретные сигналы «РУД на режиме «Взлёт»» I1 = 1. В дифференциаторах каждого двигателя осуществляются вычисления 1-ой производной частоты вращения РНД dn1/dt и 1-ой производной частоты вращения ротора КВД dn2/dt соседнего двигателя. В сумматорах каждого двигателя происходит алгебраическое суммирование поступающих дискретных сигналов с датчика частоты вращения РНД n1 и датчика частоты вращения РКВД n2 соседнего двигателя. В блоках сравнения, соответствующим этим сумматорам, производится сравнение суммарного сигнала частоты вращения РНД n1 и её 1-й производной dn1/dt и суммарного сигнала частоты вращения РКВД n2 и её 1-й производной dn2/dt с текущими величинами частоты вращения РНД n1 и частоты вращения РКВД n2 соседнего двигателя, при снижении которых ниже уровней соответствующих суммарных сигналов формируются логические сигналы «Провал режима двигателя ниже допустимого» I2 = 1. Датчик воздушной скорости самолёта фиксирует значение воздушной скорости (ВС) самолёта Vc и подаёт сигнал на датчик-сигнализатор, где производится сравнение измеренного значения воздушной скорости самолёта Vc с заданным значением скорости Vcзад [7].
За заданное значение ВС самолёта Vcзад принимается заданное значение скорости принятия решения о взлёте Vвзлзад (Vcзад = Vвзлзад), так как она характеризует скорость разбега самолёта, при которой возможно безопасное продолжение и безопасное прекращение взлёта. При величине ВС Vс > Vсзад на входы цифровых блоков (логических устройств) «И» поступает дискретный сигнал «Скорость принятия решения» I3 = 1. Кроме дискретных сигналов «РУД на режиме «Взлёт»» I1 и «Провал режима двигателя ниже допустимого» I2, поступающего с соседнего двигателя, на вход цифрового блока «И» в зависимости от этапа полёта поступают дискретные сигналы «Стояночный тормоз самолёта выключен» IТ = 1 с датчика положения стояночного тормоза и «Предкрылки не убраны» IП = 1 и датчика положения предкрылков. Эти датчики являются общими для двух двигателей. Сформированные цифровыми блоками «И» дискретные сигналы I4 = 1 поступают на исполнительные органы (блоки увеличения тяги), которые обеспечивают увеличение тяговых характеристик двигателей [5, 6].
Принципы функционирования СУ СУ самолёта и минимизации асимметрии тяги двух его исправных двухконтурных турбореактивных двигателей с минимальной «разнотяговостью»
Предлагаемая СУ СУ самолёта работает следующим образом.
На исполнительном старте перед началом разбега самолёта по взлётно-посадочной полосе, когда ВС самолёта Vc = 0, двигатели работают на режиме «Малый газ». С датчика положения предкрылков на входы блоков управления поступает дискретный сигнал IП = 1, соответствующий взлётной конфигурации крыла. После перемещения обоих РУД на режим «Взлёт» на выходе блоков сравнения значений положения РУД формируются дискретные сигналы I1 = 1. После увеличения тяги обоих ТРДД экипаж выключает стояночный тормоз самолёта, начинается разбег самолёта и датчик положения стояночного тормоза подаёт дискретный сигнал IТ = 1. При ВС Vс > Vcзад с выхода блока сравнения величин ВС самолёта (датчика-сигнализатора) подаётся дискретный сигнал I3 = 1.
При уменьшении тяги одного двигателя и соответствующем снижении уровня суммарного сигнала частоты вращения РНД n1 и её 1-й производной dn1/dt ниже текущего значения частоты вращения РНД n1 второго двигателя, на выходе блока сравнения формируется дискретный сигнал I2 = 1. При уменьшении тяги того же или другого двигателя и соответствующем снижении уровня суммарного сигнала частоты вращения РКВД n2 и её 1-й производной dn2/dt ниже текущего значения этой частоты n2 соседнего двигателя, на выходе блока сравнения частоты вращения РКВД n2 формируется дискретный сигнал I2 = 1. При поступлении сигналов I1 = 1, I2 = 1, I3 = 1, IТ = 1 и IП = 1 на входы какого-либо цифрового блока «И» на его выходе формируется дискретный сигнал I4 = 1, поступающий в случае исправности обоих двигателей на соответствующий этому цифровому блоку «И» исполнительный орган (блок увеличения тяги) двигателя для увеличения его тяговых характеристик.
Результаты исследования и их обсуждение
Формализация принципов функционирования СУ СУ самолёта и минимизации асимметрии тяги двух его исправных двухконтурных турбореактивных двигателя из выборки глубокого тестированных двигателей позволяет описать работу предлагаемой СУ СУ самолёта в полёте с несимметричной тягой из-за минимальной «разнотяговости» двух его двигателей с помощью алгоритма управления параметрами тяги n1 и n2, если задействовать в ней одновременно две программы управления по частотам вращения роторов (n1 + δn1 = const и n2 + δn2 = const). Причем, так как «серийные двигатели имеют значительный разброс значений тяги» [7], необходимо, чтобы двигатели успешно прошли глубокое тестирование их технического состояния по методу минимизации «разнотяговости» и асимметрии тяги однотипных двигателей в многомерной постановке задачи автоматического контроля асимметрии тяги после стендовых испытаний этих двигателей и успешно прошли ужесточённый выходной контроль на заводе-изготовителе по результатам такого тестирования.
Алгоритм автоматического контроля и управления параметрами тяги n1 и n2 в СУ СУ самолёта, которая состоит из двух исправно работающих двигателей с минимальной их «разнотяговостью», описывается следующими формулами для регулируемых значений n1RES = n1 + δn1 и n2RES = n2 + δn2 этих параметров двигателя № 1 и регулируемых значений n1RES* = n1* + δn1* и n2RES* = n2* + δn2* тех же параметров двигателя № 2 при асимметрии тяги этих двигателей из-за их «разнотяговости», минимизированной на заводе-изготовителе:
при  ; (1)
; (1)
при  ; (2)
; (2)
 ; (3)
; (3)
при  , (4)
, (4)
где С1 и С2 – весовые коэффициенты для одного двигателя (двигатель № 1) с параметрами тяги n1 и n2, а также соответствующие весовые коэффициенты С1* и С2* для другого двигателя (двигатель № 2) с параметрами тяги n1* и n2* при таких соотношениях измеренных на заводе значений (тестовых значений) n1тест, n2тест, n1тест* и n2тест* этих параметров тяги, как n1мин ≤ n1тест < (n1макс + n1мин)/2, n2мин ≤ n2тест < (n2макс + n2мин)/2, n1мин ≤ n1тест* < (n1макс + + n1мин)/2 и n2мин ≤ n2тест* < (n2макс + n2мин)/2.
Для минимизации асимметрии тяги исправных двигателей силовой установки двухдвигательного самолёта из-за их «разнотяговости», минимизированной на заводе-изготовителе, при n1 + С1·dn1/dt < n1* блок увеличения тяги двигателя № 1 обеспечивает рост уровня тяги этого двигателя путем увеличения частоты вращения его РНД до величины n1RES = n1 + С1·dn1/dt + [n1* – (n1 + С1·dn1/dt)]. Для минимизации асимметрии тяги исправных двигателей той же силовой установки из-за их «разнотяговости», минимизированной на заводе-изготовителе, при n2 + С2·dn2/dt < n2* блок увеличения тяги двигателя № 1 обеспечивает рост уровня тяги этого двигателя путём увеличения частоты вращения его РНД до величины n2RES = n2 + С2·dn2/dt + [n2* – (n2 + С2·dn2/dt)]. Аналогично блок увеличения тяги двигателя № 2 обеспечивает рост уровня тяги этого двигателя.
Результаты исследования соответствуют перспективным разработкам в области методов и алгоритмов минимизации «разнотяговости» двухконтурных турбореактивных двигателей силовой установки двухдвигательного самолета [5, 6].
Достоверность этих результатов подтверждается с помощью программного и аппаратного моделирования, поскольку результаты такого моделирования вполне согласуются с известной практикой автоматического управления авиационными двигателями и научно-практическими разработками, описание которых изложено в научных публикациях [2, 5, 7].
Заключение
Предлагаемая СУ СУ самолёта, содержащей два исправных двухконтурных турбореактивных двигателя, «разнотяговость» которых снижена на заводе-изготовителе после глубокого тестирования их технического состояния по результатам стендовых испытаний позволяет повысить безопасность полёта с несимметричной тягой такого самолёта, если в этой СУ СУ реализовать метод и алгоритм минимизации «разнотяговости» однотипных двухконтурных турбореактивных двигателей в многомерной постановке задачи автоматического контроля их «разнотяговости» путём ввода в СУ СУ специальных поправок – первых производных параметров тяги δn1 = С1·dn1/dt и δn2 = С2·dn2/dt с коэффициентами С1 и С2, зависящими от характеристик работы роторов двигателя.
Библиографическая ссылка
Новичков В.М., Бурова А.Ю. ФОРМАЛИЗАЦИЯ ПРИНЦИПОВ ФУНКЦИОНИРОВАНИЯ СИСТЕМЫ УПРАВЛЕНИЯ СИЛОВОЙ УСТАНОВКОЙ ДВУХДВИГАТЕЛЬНОГО САМОЛЁТА С ДВУХКОНТУРНЫМИ ТУРБОРЕАКТИВНЫМИ ДВИГАТЕЛЯМИ И МИНИМИЗАЦИИ ИХ «РАЗНОТЯГОВОСТИ» ПРИ ВЗЛЁТЕ И НАБОРЕ ВЫСОТЫ // Современные наукоемкие технологии. 2018. № 12-1. С. 121-125;URL: https://top-technologies.ru/en/article/view?id=37273 (дата обращения: 13.07.2026).