


Scientific journal
Modern high technologies
ISSN 1812-7320
"Перечень" ВАК
ИФ РИНЦ = 1,279
METHOD OF RECOGNIZING THE EXTENT OF DAMAGE OF MATERIALS ON PARAMETERS ACOUSTIC EMISSION SIGNALS

Классификация (распознавание) сложных объектов или процессов и явлений, происходящих в них, требует создания специальных систем распознавания – технических систем, включающих в себя совокупность технических аппаратно-программных средств получения и переработки информации и предназначенных для решения на основе специально разработанных алгоритмов и методик задач классификации (распознавания) соответствующих явлений и процессов, непосредственно характеризующих неисправность.
Теоретические исследования
Известно, что в ряде случаев вооружение и военная техника, удаленное оборудование или его элементы, доступ к которым затруднен, оснащается средствами неразрушающего контроля для технического диагностирования. Метод акустической эмиссии (АЭ) позволяет не только обнаружить наиболее опасные дефекты, которые развиваются на поверхности контролируемого объекта, но и оценить степень их опасности.
С помощью акустико-эмиссионной аппаратуры регистрируется множество параметров сигналов. Для получения полезной информации, при идентификации данных сигналов и их параметров, могут быть использованы различные методики – от простого порогового выделения сигнала до распознавания образов [1, 2]. Анализ характера параметров сигналов показывает, что они являются реализацией случайного процесса (носят шумовой характер), поэтому целесообразно использовать вероятностную систему распознавания образов, основанную на теории статистических решений. Поскольку параметры АЭ-сигналов носят характер случайного процесса, то наиболее общей характеристикой случайного процесса является функция распределения вероятностей, которая в дальнейшем будет использована для разработки системы распознавания классов повреждений.
Для идентификации АЭ-сигнала необходимо обосновать набор (алфавит) признаков, различающий эти сигналы (классы), и применить к нему разделяющий (решающий) критерий. Основные задачи и этапы распознавания подробно описаны в [8, 12]. Исходными данными при разработке настоящей методики являются зарегистрированные параметры АЭ-сигналов, возникающие в процессе локального нагружения исследуемого материала.
В процессе технического диагностирования объектов контроля акустико-эмиссионный контроль позволяет наблюдать за изменением свойств как самого материала, так и его покрытия. Обычно при оценке состояния материала или какой-либо конструкции оценивают энергетические параметры сигналов или их амплитудно-частотные характеристики. Необходимо отметить, что часто сигналы, пришедшие от заведомо разных источников, имеют близкие значения параметров. В ряде случаев (недостаток оборудования и аппаратуры) определить дефекты объекта контроля по пороговому анализу значений амплитуд АЭ-сигналов в промежутке времени наблюдения достаточно проблематично [3, 4, 11].
Плотность распределения вероятности по параметрам АЭ-сигналов рассчитывается по формуле
 (1)
(1)
где Ni – количество АЭ-сигналов с соответствующими параметрами, попавших в i-й интервал амплитуды, частоты и др.; N – количество импульсов, зарегистрированных за промежуток времени наблюдения [7];  – вектор признаков; xi – параметр АЭ-сигнала (амплитуда, частота и т.д.) – измеряемый признак.
– вектор признаков; xi – параметр АЭ-сигнала (амплитуда, частота и т.д.) – измеряемый признак.
Поскольку акустико-эмиссионная аппаратура позволяет регистрировать большое количество параметров АЭ-сигналов (время прихода АЭ-сигнала, мкс; величина первого пика, дБ; частота до максимума, кГц и т.д.), то является целесообразным предварительный отбор наиболее информативных параметров с целью уменьшения вычислительной сложности предлагаемой стратегии распознавания, такой мерой оценки являются энтропия и дивергенция. Предпочтение отдается тем параметрам, которые имеют минимальную энтропию и максимальную дивергенцию. Вычисление энтропии производится по формуле
 (2)
(2)
где  – вероятность появления признака (образа) xj при условии его принадлежности к классу ωi; N – число интервалов [5].
– вероятность появления признака (образа) xj при условии его принадлежности к классу ωi; N – число интервалов [5].
Дивергенция рассчитывается по формуле
 (3)
(3)
где 

В результате предварительного отбора параметры АЭ-сигналов, имеющие минимальную энтропию и максимальную дивергенцию, будут составлять словарь признаков повреждений необходимый для распознавания.
При использовании в распознавании вероятностных методов, по сути, применяется классическое решение задачи проверки простой гипотезы против сложной альтернативы с применением многоканальной системы (рисунок), в которой согласованные фильтры заменяются разделяющими (решающими, дискриминантными) функциями p(х/Нi) – условными вероятностями наблюдения параметра x при справедливости гипотезы Hi (функциями правдоподобия).
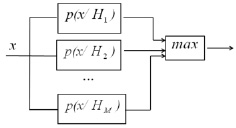
Многоканальная система проверки многоальтернативных гипотез
Решающая функция представляет собой функцию, относящую вектор наблюдаемых признаков x к одному из заданных классов алфавита. Оптимальной считается решающая функция p(Нi/х), которая имеет наименьшую вероятность ошибки pош(Нi) при всех допустимых значениях x формируется на базе апостериорных вероятностей [5, 10]:
 (4)
(4)
где pош(Нi) – вероятность ошибочного принятия решения о справедливости гипотезы Нi.
Оптимальная решающая функция p(Нi/х) определяется с помощью формулы
 (5)
(5)
где M – количество классов k = 0, 1, 2,…, M; p(Нk) – априорная вероятность появления объектов k-го класса; p(х/Нk) – условная вероятность появления наблюдения x при истинности гипотезы Нk; p(х/Нi) – апостериорная вероятность справедливости гипотезы Нi при наблюдении события x.
В соответствии с (5) оптимальная решающая функция p(Нi/х) относит набор x к классу Нi в том и только в том случае, если выполняются равенства

 . (6)
. (6)
Поскольку сумма в знаменателе (5) является полной вероятностью и одинакова для всех значений j, оптимальное решающее правило можно записать в виде:

 . (7)
. (7)
При di = dj может быть принято решение об отнесении вектора x как к классу Нi так и к классу Нj.
Таким образом, решающую функцию di можно использовать для классификации, т.е. использовать соотношение (7) для разделения N-мерного пространства словаря признаков (N – число признаков) на области, соответствующие классам алфавита.
Так как реализация Байесовского классификатора предполагает знание условных вероятностей p(х/Нj) появления реализации признаков x при справедливости j-ой гипотезы (j = 1, 2,…, M – количество классов) – получение оценки подобных вероятностей исходя из заданной выборки измеряемых признаков является основной задачей классификации.
Пусть  – оценка условной вероятности p(х/Нi). Воспользуемся разложением оценки
– оценка условной вероятности p(х/Нi). Воспользуемся разложением оценки  в ряд [10]:
в ряд [10]:
 (8)
(8)
где  – коэффициенты, подлежащие определению;
– коэффициенты, подлежащие определению;  – множество заданных базисных функций; L – порядок аппроксимирующего многочлена (подбирается эмпирически); i – указывает класс алфавита.
– множество заданных базисных функций; L – порядок аппроксимирующего многочлена (подбирается эмпирически); i – указывает класс алфавита.
Для рассматриваемых классов сформируем байесовский классификатор, воспользовавшись экспериментальными распределениями, полученными по измеренным и зарегистрированным значениям признаков, и соотношением (8). Базисные функции должны быть ортогональными в области определения признаков. Поскольку диапазон измерения признаков конечен, он всегда может быть приведен к нормированному интервалу [0, 1], поэтому будут удобны полиномы Лежандра, поскольку областью их ортогональности является интервал [– 1, 1]. В одномерном случае эти функции определяются рекуррентным соотношением [9, 12]:
 (9)
(9)
где P0(x) = 1 и P1(x) = x.
Ортонормированные многочлены Лежандра определяются из соотношения
 . (10)
. (10)
Несколько первых многочленов Лежандра принимают следующие значения P0(x) = 1, P1(x) = x, 

 и т.д.
и т.д.
В соответствии с вышеуказанными ортогональными многочленами Лежандра и соотношением (10) первые ортонормированные полиномы Лежандра принимают вид
 ;
;  ;
;
 и т.д.
и т.д.
Множество ортогональных функций для N-мерного случая можно получить, формируя N-мерные комбинации одномерных функций [12]:
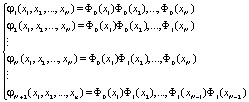 (11)
(11)
и так далее, т.е. при формировании этих функций φl(x) можно использовать произвольную N-мерную комбинацию функций одной переменной.
Таким образом, ортонормированные n-мерные функции Лежандра с учетом соотношения (10) принимают вид (где n – количество признаков)
и так далее.
Следующая задача заключается в определении коэффициентов  разложения (8). Используя допущение об ортонормированности функции φl(xij), эти коэффициенты можно вычислить из соотношения [8, 12]
разложения (8). Используя допущение об ортонормированности функции φl(xij), эти коэффициенты можно вычислить из соотношения [8, 12]
 (12)
(12)
где M – номер класса алфавита k = 1, 2,…, M; L – порядок аппроксимации многочлена (подбирается эмпирически) l = 1, 2,…, L; J – число интервалов дискретизации i-го признака в k-ом классе; j – номер отсчета (j = 1, 2,…, J) i-го признака в k-ом классе.
В дальнейшем при поступлении на вход в систему неклассифицированной выборки необходимо определить ортонормированные функции Лежандра  по формуле (11) для этой выборки Вычисление апостериорных вероятностей для классифицируемой выборки производим по формуле
по формуле (11) для этой выборки Вычисление апостериорных вероятностей для классифицируемой выборки производим по формуле
i = 1, 2,…, k, (13)
где k – количество классов повреждений.
Определение принадлежности к классу определяется по максимуму p(х/Нk).
Экспериментальные исследования
Проведенные экспериментальные исследования проводились с целью проверки достоверности предлагаемой методики.
Экспериментальные исследования проводились с использованием разных механизмов нагружения объектов контроля (механический, тепловой и др.) и различной энергией воздействия и одновременной регистрацией акустико-эмиссионных сигналов. АЭ-сигналы регистрировались с помощью зафиксированных с тыльной стороны объектов контроля пьезоэлектрических датчиков, входящих в состав акустико-эмиссионной аппаратуры «Малахит 12А-С». В результате указанного нагружения на поверхности объектов контроля образовывались различные повреждения. Данные повреждения объединялись в шесть классов (первый класс повреждений соответствует отсутствию повреждений, второй класс повреждений – единичным трещинам на поверхности объекта контроля, третий класс повреждений соответствует появлению в месте локального нагружения множества трещин на поверхности и т.д.) и зависели от степени нагружения. При определении словаря признаков зарегистрированные параметры АЭ-сигналов обрабатывались с помощью выражения (1) для получения одномерных функций распределения pj(хj).
С помощью формул (2) и (3) в качестве информативных признаков были отобраны четыре параметра (амплитуда А (дБ), частота F (Гц), количество сигналов N (ед.), энергетический параметр Е (мкв*мкс)).
Априорная вероятность принималась одинаковой для каждого класса и равной 1/6. Чем выше значение полинома (10), тем выше апостериорная вероятность. Для обоснования необходимой степени полинома используется разница между апостериорными вероятностями соседних классов повреждений, которая имеет предел. Полученные в результате проведенного эксперимента апостериорные вероятности с использованием разработанного программного обеспечения [6] представлены в таблице.
Результаты расчета апостериорных вероятностей
|
1 класс повреждений |
2 класс повреждений |
3 класс повреждений |
4 класс повреждений |
5 класс повреждений |
6 класс повреждений |
|
|
P(x/H1) |
0,3486 |
0,2901 |
0,0995 |
0,0600 |
0,0762 |
0,1000 |
|
P(x/H2) |
0,2901 |
0,3488 |
0,1252 |
0,0677 |
0,0712 |
0,0979 |
|
P(x/H3) |
0,0995 |
0,1252 |
0,2593 |
0,2007 |
0,1825 |
0,1894 |
|
P(x/H4) |
0,0600 |
0,0667 |
0,2007 |
0,2557 |
0,2132 |
0,2151 |
|
P(x/H5) |
0,0762 |
0,0712 |
0,1852 |
0,2283 |
0,2549 |
0,2208 |
|
P(x/H6) |
0,1000 |
0,0979 |
0,1894 |
0,2151 |
0,2208 |
0,2460 |
Результаты расчета апостериорных вероятностей
|
1 класс повреждений |
2 класс повреждений |
3 класс повреждений |
4 класс повреждений |
5 класс повреждений |
6 класс повреждений |
|
|
P(x/H1) |
0,3486 |
0,2901 |
0,0995 |
0,0600 |
0,0762 |
0,1000 |
|
P(x/H2) |
0,2901 |
0,3488 |
0,1252 |
0,0677 |
0,0712 |
0,0979 |
|
P(x/H3) |
0,0995 |
0,1252 |
0,2593 |
0,2007 |
0,1825 |
0,1894 |
|
P(x/H4) |
0,0600 |
0,0667 |
0,2007 |
0,2557 |
0,2132 |
0,2151 |
|
P(x/H5) |
0,0762 |
0,0712 |
0,1852 |
0,2283 |
0,2549 |
0,2208 |
|
P(x/H6) |
0,1000 |
0,0979 |
0,1894 |
0,2151 |
0,2208 |
0,2460 |
Выводы
Применение предложенной методики, повышает достоверность классификации повреждений поверхности материалов в условиях внешних воздействий. Полученные результаты предполагается использовать для оценки технического состояния элементов конструкций, работающих автономно, а также для решения ряда других задач. В качестве аппаратной базы для реализации предлагаемой методики предлагается использовать уже имеющиеся акустико-эмиссионные системы.
Библиографическая ссылка
Лебедев А.С., Добролюбов А.Н., Лебедев Е.Л., Безруков А.В. МЕТОДИКА РАСПОЗНАВАНИЯ СТЕПЕНИ ПОВРЕЖДЕНИЙ ПОВЕРХНОСТЕЙ МАТЕРИАЛОВ ПО ПАРАМЕТРАМ АКУСТИКО-ЭМИССИОННЫХ СИГНАЛОВ // Современные наукоемкие технологии. 2017. № 2. С. 36-40;URL: https://top-technologies.ru/en/article/view?id=36581 (дата обращения: 17.06.2026).