


Scientific journal
Modern high technologies
ISSN 1812-7320
"Перечень" ВАК
ИФ РИНЦ = 1,279
ON NUMERICAL EXPERIMENTS FOR SHIP COLLISION AVOIDANCE METHODS RESEARCH

Модели, методы и алгоритмы, реализуемые современными системами управления движением судов (СУДС), привлекают внимание большого количества исследователей. Разработка наиболее эффективных алгоритмов, обеспечивающих максимальную безопасность движения судов, является актуальной инженерной и научной проблемой [7, 8, 11, 12, 15].
Вывод о применимости, эффективности и надежности того или иного метода обеспечения безопасности движения может быть сделан по результатам экспериментов. Постановка натурных экспериментов, связанных с движением судов, очевидно, ведёт к значительным временным, материальным и организационным затратам; зачастую такие натурные эксперименты вообще не осуществимы. Поэтому и в исследовательской работе, и при отладке и настройке конкретных СУДС зачастую прибегают к вычислительным экспериментам и моделированию движения судов [1–6].
Моделирование движения в принципе решает задачу оценки работы алгоритмов в типичных ситуациях. Вместе с тем при отработке алгоритмов, связанных с коллективным движением судов, важно смоделировать их работу в ситуациях, характерных для конкретной акватории. Простое моделирование траекторий движения судов, в том числе – с привлечением экспертов (диспетчеров, судоводителей), не может гарантировать корректность и полноту вычислительного эксперимента. Это является побудительным мотивом создания особых баз данных, хранящих ретроспективную информацию о движении судов на той или иной акватории, и использования их при изучении («проигрывании») работы алгоритмов СУДС. Особенно важно использовать данные о реальном движении судов при обучении интеллектуальных компонент СУДС [7], так как нередко только таким способом можно обеспечить корректность и валидность их настраиваемых параметров.
Настоящая работа посвящена описанию информационной системы, используемой для сбора и хранения данных о трафике судов в акваториях морских портов, и некоторых особенностей её применения [1]. Собираемые данные могут быть использованы как непосредственно, так и в сводном виде при исследовании задач обеспечения безопасности коллективного движения судов.
Описание информационной системы сбора данных
Данные о движении судов на конкретной акватории могут быть получены различными способами: с установленного на судне или берегу радара, с помощью визуального мониторинга (видеокамера) или от автоматической идентификационной системы (АИС). Использование информации от АИС имеет целый ряд преимуществ: относительная простота обработки информации о местоположении судов, хорошая точность координат (точность определения координат по GPS/ГЛОНАСС составляет примерно 10 метров), использование радиочастот, не требующих прямой видимости.
Получение данных напрямую с АИС связано с проблемой приобретения или получения физического доступа к соответствующему оборудованию, что не всегда возможно [10, 13, 14]. Вместе с тем существуют ресурсы интернет, которые публикуют открыто или по подписке информацию о движении судов, полученную через сеть приёмников сигналов АИС. Использование таких сайтов позволяет полностью отказаться от использования реального оборудования, что даёт ряд очевидных преимуществ: минимальные финансовые затраты на получение информации, отсутствие ограничений по местоположению оборудования для сбора данных, возможность получения информации о сотнях портов по всему миру. Из недостатков стоит отметить негарантированность постоянной работы сервиса, небольшую частоту обновления информации (порядка 1–5 минут).
Примерами таких сайтов являются www.marinetraffic.com, www.vesseltracker.com, www.vesselfinder.com, shipfinder.co. Эти сайты очень похожи по характеру предоставляемой информации (что обусловливается единым основным источником информации, которым являются транспондеры АИС) и своей реализации со стороны клиента, однако существенно различаются зоной охвата (определяемой источниками информации) и условиями получения информации (определяется соответствующей лицензией).
Учитывая особенности предоставляемой информации, в качестве информационной базы созданной системы сбора данных был выбран сайт www.marinetraffic.com, который позволяет получать нужные данные бесплатно и без регистрации. Сайт наглядно предоставляет информацию о судах, находящихся в зоне действия приёмников АИС, которые передают информацию на его серверы. Информация на сайте обновляется сравнительно редко: один раз за одну или несколько минут; вместе с тем данные с указанного сайта достаточно точны для применения в исследовательских целях.
В разработанной системе сбора данных процедуры сбора данных с сайта и загрузки их в базу данных разделены. Данные о судах, полученные с сайта, проходят обработку для приведения к истинным временным отметкам (с точностью до минуты); повторяющиеся данные при этом отбрасываются.
В настоящее время имеется возможность использования разработанной системы для сбора данных по всем акваториям, представленным на сайте www.marinetraffic.com. Например, с помощью разработанной системы были собраны данные по движению судов на акватории портов Владивосток (рис. 1) и Находка (рис. 2), в Сангарском проливе (рис. 3), в Токийском заливе (рис. 4) и др.
Приведённые рис. 1–4 позволяют оценить характерные траектории движения судов на конкретной акватории. Так, на рис. 1 видно, что основной фарватер движения судов в акватории, прилегающей к порту Владивосток, – это «Уссурийский залив – пролив Босфор Восточный – бухта Золотой Рог», хорошо видны места якорных стоянок. На рис. 2 хорошо видны подходы к портам залива Находка: в бухте Находка, бухте Навицкого, бухте Врангеля, бухте Козьмина; видны места якорных стоянок в заливе Находка и заливе Восток. На рис. 3 хорошо просматривается характерное «перекрёстное» движение в Сангарском проливе: в направлениях «север ? юг» и «запад ? восток». На рис. 4 видны фарватеры движения судов по Токийскому заливу, явно идентифицируются места пересечения судопотоков.
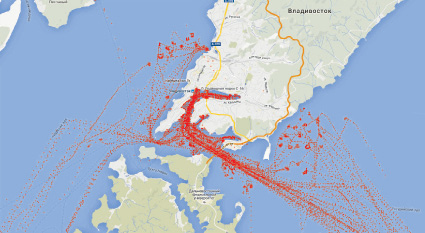
Рис. 1. Движение судов по акватории, прилегающей к порту Владивосток
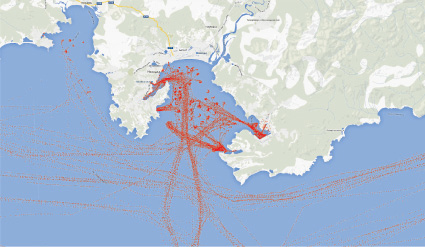
Рис. 2. Движение судов по акватории, прилегающей к заливу Находка
Вообще, данные, собираемые описанной системой, представляют собой исключительную ценность для проведения исследований в области обеспечения навигационной безопасности коллективного движения судов [9, 11, 12].
Вместе с тем проблемой, возникающей при использовании данных с такого рода ресурсов, является чрезмерная разреженность данных (например, на marinetraffic.com координаты судов обновляются не чаще одного раза в минуту, что недостаточно для моделирования решения некоторых задач, связанных с обеспечением навигационной безопасности коллективного движения судов). Для получения данных о движении судна с большей частотой необходимо прибегнуть к их интерполяции, что является побудительным мотивом разработки различных моделей интерполяции траекторий движения судов на основе набора данных о координатах, скоростях и курсах их движения. При этом такая интерполяция требует восстановления не просто геометрии траектории, а учета навигационной специфики движения судов, состоящей в сочетании прямолинейных и маневренных участков движения [7].
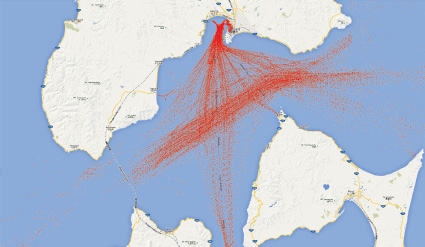
Рис. 3. Движение судов в Сангарском проливе

Рис. 4. Движение судов в Токийском заливе
Библиографическая ссылка
Гриняк В.М., Аникеева А.С., Васильченко Н.Ю., Гусев Е.Г. О ПЛАНИРОВАНИИ ВЫЧИСЛИТЕЛЬНЫХ ЭКСПЕРИМЕНТОВ ПРИ ИССЛЕДОВАНИИ МЕТОДОВ ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ КОЛЛЕКТИВНОГО ДВИЖЕНИЯ СУДОВ // Современные наукоемкие технологии. 2016. № 4-2. С. 230-234;URL: https://top-technologies.ru/en/article/view?id=35808 (дата обращения: 15.06.2026).