


Scientific journal
Modern high technologies
ISSN 1812-7320
"Перечень" ВАК
ИФ РИНЦ = 1,279
LOADING POWERPLANT FELLER BUNCHERS MODE EMERGENCY BRAKING ROCKER

При разборе завалов леса часто возникают режимы аварийного торможения стрелы манипулятора при подъеме или спускании горизонтально расположенного дерева, вследствие чего происходят колебания масс динамической системы значительных амплитуд. На рису. 1 представлена расчетная схема системы «ВПМ – предмет труда – дерево» для исследования данного режима работы.
Кинетическая энергия системы

Потенциальная энергия системы

В выражении кинетической энергии


где iП – передаточное число 
В соответствии с уравнением Лагранжа II-го рода имеем следующую систему уравнений:

 (1)
(1)

Домножим уравнение (1) системы (1) на J2, уравнение (2) на J1, уравнение (2) на J3 и уравнение (3) на J2 и соответственно вычтем из первого второе.

или
 (2)
(2)
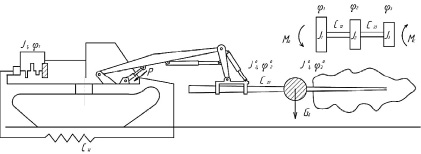
аб
Рис. 1. Расчетная схема динамической системы «ВПМ – предмет труда – дерево»: а – исходная; б – эквивалентная. Принятые обозначения: J1 – приведённый момент инерции кривошипно-шатунного механизма, маховика и сцепления; J2, J3 – приведенные к коленчатому валу моменты инерции соответствующего манипулятора с ЗСУ и дерева; 1, 2, 3 – обобщенные угловые координаты масс соответственно с моментами инерции J1, J2, J3; С12 – крутильная жесткость коленчатого вала, гидропередачи и манипулятора; С23 – приведенная крутильная жесткость дерева; МД – приведенный крутящий момент гидропередачи; Мспр – приведенный момент сопротивления; Р – усилие на штоке (штоках) гидроприводов подъема (опускания) стрелы; r – плечо силы Р; Gд – сила тяжести дерева
Далее

или преобразуя,
 (3)
(3)
Выразим из уравнения (2) (1 – 2) и 


Подставим значения для (2 – 3) и  в уравнение (3) и преобразуем
в уравнение (3) и преобразуем


И окончательно
 (4)
(4)


Вводя новую переменную

получим однородное уравнение вида
 (5)
(5)
Его характеристическое уравнение имеет вид
 (6)
(6)
Решение уравнения (5) запишется как
 (7)
(7)
где
Пример. Принимаем исходные данные применительно к ВПМ ЛП-19А
L=5м; V=2,0м3; hТ=12м; J1=4,05кгм2; 
 C12=30,7Нм;
C12=30,7Нм;  J2=0,083кгм2;
J2=0,083кгм2;  J3=0,402кгм2; C23=1,825Нм;
J3=0,402кгм2; C23=1,825Нм;
Рассмотрим режимы работы при подъеме дерева стрелой.
1.Определяем коэффициенты дифференциального уравнения (4)


2.Найдем частоты колебаний нагрузки

k1=19,92c–1;k2=2,17c–1.
3.Определяем постоянные интегрирования С1…С4.
В соответствии с режимом работы принимаем начальные условия:




При этих начальных условиях выражения для определения постоянных будут: С1=С3=0;


Примем  и tp=0,15c.
и tp=0,15c.
Тогда 

C4=0,265рад.
4.Определяем максимальную динамическую нагрузку на силовую установку ВПМ:
–деформацию упругой связи С12
 θ1max=0,529рад;
θ1max=0,529рад;
–динамический добавочный момент, приведенный к коленчатому валу

–статический момент, приведенный к коленчатому валу

Отбираемая мощность от силовой установки на привод гидронасоса

Снижение частоты вращения коленчатого вала
 N:=10; t:=0,0001...N; n:=0...N;
N:=10; t:=0,0001...N; n:=0...N;


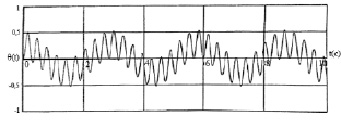
Рис. 2. График изменения деформации упругой связи С12 при разгоне системы ( , tp=0,15c)
, tp=0,15c)
В случае аварийного торможения системы начальные условия будут






То есть

где nном – номинальная частота вращения коленчатого вала; MΣ – суммарный момент.

Здесь
Режим аварийного торможения стрелы манипулятора при подъеме (опускании) горизонтально расположенного дерева сопровождается добавочной динамической нагрузкой на машину. Невысокие значения коэффициентов динамичности определяются большим статистическим моментом в этом случае. При этом снижение частоты вращения коленчатого вала двигателя происходит в пределах допустимых значений.
Разработанная математическая модель динамической системы позволяет с погрешностью 8–10 % определить уровень воздействия на силовую установку в режимах разгона или торможения при освобождении основания деревьев от снега, на этапе разработки конструкторской документации.
Библиографическая ссылка
Шоль Н.Р., Александров В.А., Тимохов Р.С., Тимохова О.М. НАГРУЖЕННОСТЬ СИЛОВОЙ УСТАНОВКИ ВАЛОЧНО-ПАКЕТИРУЮЩЕЙ МАШИНЫ В РЕЖИМЕ АВАРИЙНОГО ТОРМОЖЕНИЯ МАНИПУЛЯТОРА // Современные наукоемкие технологии. 2016. № 2-2. С. 265-269;URL: https://top-technologies.ru/en/article/view?id=35614 (дата обращения: 13.07.2026).