


Scientific journal
Modern high technologies
ISSN 1812-7320
"Перечень" ВАК
ИФ РИНЦ = 1,279
AIRCRAFT FOR DELIVERY OF LIFE-SAVING

Описываемое техническое решение относится к летательным аппаратам вертикального взлета и посадки специального назначения, в частности, к беспилотным летательным аппаратам, предназначенным для проведения спасательных работ при чрезвычайных ситуациях. Такие летательные аппараты могут быть использованы для мониторинга высотных зданий и сооружений, разведки обстановки внутри помещений, оказания экстренной помощи людям, терпящим бедствие на отсеченных пожаром верхних этажах зданий, путем доставки туда спасательных средств.
Выполняемые задачи
Основными задачами, выполняемыми летательным аппаратом для доставки спасательных средств, являются:
Транспортировка компактных средств пожаротушения в помещения, близко расположенные к зонам распространения огня.
Транспортировка спасательных средств, предметов для оказания скорой медицинской помощи через оконные проёмы в еще неохваченные огнём помещения.
Проникновение аппарата в зону свободного доступа пострадавших к спасательным средствам.
Обеспечение аудиоинструктажа, необходимого для применения спасательных средств, и обеспечение устойчивой двухсторонней радиосвязи между спасателями и пострадавшими.
Оказание пострадавшим конкретной помощи в условиях чрезвычайных ситуаций.
Выполнение перечисленных задач должно обеспечиваться летательным аппаратом как в ручном, так и в автоматизированном режиме.
Общие требования к доставляемому оборудованию и конструкции летательного аппарата
Конструкция доставляемых средств пожаротушения, спасения и первой медицинской помощи, средств для эвакуации должна обеспечить простое, понятное ими пользование, а также надёжную их фиксацию на элементах внутри здания, обеспечивающую безопасное покидание зоны пожара пострадавшими.
Техническим результатом данного решения должно быть создание простого, малозатратного летательного аппарата, обладающего хорошей маневренностью и управляемостью, с относительно высокой долей полезной нагрузки.
Летательный аппарат для доставки спасательных средств должен иметь минимальное количество травмоопасных, выступающих за габариты частей, так как он рассчитан на приземление в местах скопления людей.
Описание летательного аппарата и доставляемых спасательных средств
Учитывая необходимость создания летательного аппарата для доставки спасательных средств простым, надежным, при минимальных затратах эффективным, он выполнен по схеме квадрокоптера (мультикоптера).
Данная концепция летательного аппарата для доставки спасательных средств позволяет в зависимости от массы и назначения целевой нагрузки изменять его тяговооруженность. Такие изменения производятся путем наращивания четного количества силовых установок. Мультикоптер позволяет без особых переделок перейти от 4-х силовых установок к 6, 8, 10, 12 и т.д. силовым установкам, что можно предусмотреть на этапе проектирования аппарата. (См. Патент РФ № 2403183 от 30.01.2009 г. «Многовинтовой беспилотный летательный аппарат вертикального взлёта и посадки» (МВБЛАВВП), авторы Воронков Ю.С. и Воронков О.Ю.).
Рассматриваемый вариант аппарата имеет фюзеляж 1, выполненный в виде эллипсоида. Эллипсоидный фюзеляж аппарата 1 имеет технологический и одновременно эксплуатационный разъем. Разъем выполнен по экватору эллипсоида и позволяет собирать, разбирать аппарат, обеспечивая свободный доступ к его силовым установкам, оборудованию и аппаратуре.
Внутренняя полость фюзеляжа 1 является контейнером для размещения спасательных средств, одновременно она содержит четыре электрические силовые установки 2, выполненные по схеме «воздушный винт в канале». Сверху такая силовая установка закрыта предохранительной решеткой 3 специальной формы, которая беспрепятственно пропускает поток воздуха к «воздушному винту в канале». Она закрывает его от случайного фронтального соприкосновения с посторонними предметами, в том числе обеспечивая травмобезопасность спасаемых людей при непосредственном прибытии аппарата в зону спасения. Воздушный винт 4 каждой из силовых установок 2 приводится во вращение высокоэффективным бесколлекторным электрическим двигателем 5, закрепленным посредством пилонов 6 в каждом из каналов.
Вверху полюсной части эллипсоидного фюзеляжа 1 установлен комбинированный блок освещения и съема видеоинформации 7. Периферийная часть 8 фюзеляжа 1 сформирована таким образом, чтобы во внутренней её полости возможно было развести электрическую проводку, соединяющую элементы бортовой аппаратуры. С внешней стороны внизу эллипсоидного фюзеляжа 1 закреплена вторая видеокамера 9. Нижняя часть эллипсоидного фюзеляжа 1 оснащена специальной несущей рамой, на которой закреплено доставляемое пострадавшим людям спасательное оборудование и средства. Там же, снизу, установлен амортизирующий тор 10, позволяющий аппарату совершать мягкую посадку на неровные поверхности.
Верхняя часть эллипсоидного фюзеляжа 1 оснащена крышкой 11 с легкооткрываемыми замками 20, обозначенными специальными светящимися диодами. В результате открытия крышки 11 обеспечивается свободный доступ к доставленным спасательным средствам.
Аппарат оснащен громкоговорящей связью 12, размещенной в боковых полостях эллипсоида фюзеляжа 1. Радиоэлектронное оборудование 13 управления, навигации и связи аппарата также размещено в боковых полостях эллипсоидного фюзеляжа 1 в защищенном исполнении. Там же размещены источники электропитания 14 силовой установки и бортового электронного оборудования аппарата. Механические системы управления пространственным положением аппарата полностью отсутствуют, что значительно удешевляет процесс производства и эксплуатации аппарата.
Ориентировочный состав доставляемых спасательных средств:
- Самотормозящаяся лебедка 15;
- Аптечка 16;
- Дымозащитная маска 17;
- Радиостанция 18;
- Противогаз 19.
Для изъятия доставленных спасательных средств из контейнера фюзеляжа 1 в экстренной ситуации выполнены легко открываемые замки 20, расположенные на крышке 11 сверху верхней половины эллипсоидного фюзеляжа 1, которые обозначены специальными светящимися диодами.
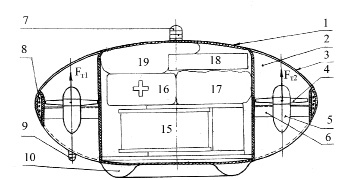
Рис. 1
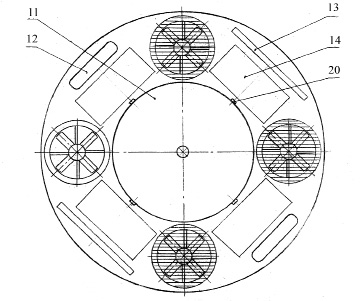
Рис. 2
Работа аппарата
Работа аппарата для доставки спасательных средств на этажи высотных зданий и сооружений при пожарах осуществляется следующим образом. Аппарат, находящийся на земле в дежурном режиме, оснащенный вышеназванными спасательными средствами, по команде «тревога» запускает свои силовые установки 2. При вращении четырех воздушных винтов 4 силовыми установками 2 каждая из них создает тягу Fт1, Fт2, Fт3, Fт4. После того как суммарная тяга превысит вес аппарата, последний взлетает.
В полете продольное управление аппаратом осуществляется путем дифференциального изменения тяги передних и задних воздушных винтов, поперечное – путем дифференциального изменения силы тяги боковых винтов, расположенных справа и слева, а путевое – дифференциальным изменением силы тяги накрест расположенных винтов.
Управление по всем каналам обеспечивает бортовая система автоматизированного управления (БСАУ), построенная на основе микропроцессоров, корректирующих работу силовых установок в соответствии с заданными законами управления. В составе БСАУ малогабаритная инерциальная навигационная система, которая в себя включает: приемник сигналов спутниковой радионавигационной системы типа GPS; бесплатформенную инерциальную навигационную подсистему на основе баровысотомера, микромеханических акселерометров, пьезогироскопов. Комплексируя данные этих датчиков с данными приемника GPS, система вырабатывает полное навигационное решение по координатам и углам ориентации аппарата.
При подходе аппарата к зданию, в котором возникло возгорание на одном из этажей, он зависает, давая возможность оператору на наземном мониторе осмотреть зону пожара. Зависание аппарата обеспечивается равенством тяг Fт1 = Fт2 = Fт3 = Fт4 всех четырех силовых установок с возможностью продольного, поперечного и путевого маневра. Оператор на земле посредством видеокамер оценивает обстановку, масштабы распространения огня и наличие терпящих бедствие людей в здании. Он осуществляет полет как в пределах прямой видимости, так и по изображениям, получаемым с видеокамер (преимущественно с верхней 7). При обнаружении людей в зоне бедствия и закрытых окнах оператор оценивает размер оконных проемов и извещает пострадавших о необходимости разбить стекла в окне или открыть рамы для приема аппарата. В отдельных случаях применяется специальный беспилотный аппарат для ликвидации остекления зданий и сооружений в чрезвычайных ситуациях. После оценки возможности проникновения аппарата в оконный проем оператор по громкоговорящей связи предупреждает пострадавших о необходимости отойти от окна, осторожно заводит аппарат внутрь помещения и выдает команду на посадку аппарата. При этом срабатывают легко открываемые замки 20. Крышка 11 эллипсоидного фюзеляжа 1 отбрасывается, обеспечивая доступ пострадавших к доставленным средствам спасения. Один из пострадавших в соответствии со своим состоянием после инструктажа по громкоговорящей связи может воспользоваться самотормозящейся лебедкой 15 для спуска на безопасный этаж или на землю.
При необходимости спасения нескольких человек используются несколько подобных летательных аппаратов по описанной схеме.
После завершения эвакуации пострадавших людей из зоны бедствия летательный аппарат может оставаться в данной зоне, рискуя быть уничтоженным огнем.
Он может быть разовым, и потому относительно дешевым в производстве и эксплуатации. В некоторых случаях имеется возможность применения данного аппарата для доставки спасательных средств с последующим дистанционным сбросом их в труднодоступные места без контакта с пострадавшими. В этом случае их сброс производится через предусмотренный соответствующим вариантом нижний люк.
Выводы
Таким образом, предлагаемый летательный аппарат для доставки спасательных средств позволяет быстро доставить средства пожаротушения, спасения и первой медицинской помощи на любой этаж высотного здания для организации и обеспечения безопасной эвакуации пострадавших. Он позволяет повысить безопасность спасения людей из труднодоступных мест высотного здания и снизить стоимость спасательных работ.
Библиографическая ссылка
Воронков Ю.С., Воронков О.Ю. ЛЕТАТЕЛЬНЫЙ АППАРАТ ДЛЯ ДОСТАВКИ СПАСАТЕЛЬНЫХ СРЕДСТВ // Современные наукоемкие технологии. 2014. № 1. С. 15-18;URL: https://top-technologies.ru/en/article/view?id=33622 (дата обращения: 03.06.2026).