


Scientific journal
Modern high technologies
ISSN 1812-7320
"Перечень" ВАК
ИФ РИНЦ = 1,279
SMALL-SIZED AIRCRAFT FOR MONITORING OF WATERS

Стремительно меняющаяся гидрометеообстановка в районах приводнения гидросамолетов и самолетов-амфибий требует наблюдения и оценки условий взлета-посадки в реальном масштабе времени. Решение этой проблемы может быть осуществлено с помощью переносных комплексов мониторинга водных акваторий (ПКМВА), которые способны вести телевизионное наблюдение за водной поверхностью гидродромов и обнаруживать объекты на них. ПКМВА являются сложными радиотехническими системами, объединяющими в себе современные достижения в области миниатюрной беспилотной авиации, радиоэлектроники, механики и информационных технологий. Такие комплексы содержат составные части, внешние системы и сенсоры, вынесенные в пространство на управляемых платформах, способных собирать информацию на значительном удалении от места старта.
Решения навигационных задач ПКМВА построены на основе принципа комплексирования данных инерциальных навигационных систем со спутниковыми навигационными системами.
Особенности создаваемого комплекса. Комплекс ПКМВА, предназначенный для применения совместно с гидросамолетами и самолетами-амфибиями, должен обеспечивать подготовку акваторий для их приводнения и не должен исключать других областей применения, где требуется воздушное наблюдение за местностью и объектами на ней с условиями высокоточного определения их координат.
В комплексе ПКМВА в качестве управляемых платформ используются малоразмерные летательные аппараты (МЛА) с возможностью вертикального взлета, посадки и зависания. Их характерной особенностью является возможность размещения, хранения и запуска с борта гидросамолета или самолета-амфибии в полете. Для этого МЛА имеет специальную аэродинамическую компоновку и габариты, позволяющие аппарату отделяться от борта на минимальной скорости полета и затем, затормозившись, запускать свою силовую установку с переходом к полету в автономном режиме.
Благотворительным обществом научно-технического творчества и экологии «Ювенал» города Таганрога были проведены исследования, выполнены проекты и построены летающие модели аппаратов, имеющих компоновки, диктуемые вопросами хранения, запуска и применения МЛА.
Один из предлагаемых вариантов. Наиболее подходящими в этом случае являются летательные аппараты вертикального взлета и посадки оригинальной конструкции со складными воздушными винтами, симметричные на виде сверху, способные трансформироваться в полете.
Рассматриваемый вариант управляемой платформы, входящей в комплекс ПКМВА, позволяет выполнить предъявляемые требования на основе идеи беспилотного летательного аппарата со сферическим фюзеляжем, который может двигаться в любую сторону, а также зависать над исследуемой зоной. Он представляет собой сферу, внутри которой импеллер создает ~ 90 % тяги, а остальные 10 % тяги создается складным воздушным винтом. Аппараты данной аэродинамической компоновки могут быть уложены в специальные кассеты на борту гидросамолета или самолета-амфибии с целью их запуска в полете.
Воздушный винт, кроме создания недостающей тяги, обеспечивает аппарату необходимую гиростабилизацию.
Конструктивно малоразмерный беспилотный летательный аппарат формируется из двух модулей: сферического модуля оборудования, управления и целевой нагрузки 1, концентрично которому в его полости по оси установлен подъемно-маршевый модуль 2, выполненный в виде комбинации импеллерной установки с отклоняемыми рулевыми поверхностями и автоматического воздушного винта с косым шарниром. Внутренняя полость сферического модуля оборудования, управления и целевой нагрузки 1 выполнена в герметичном исполнении и обладает необходимой плавучестью для спасения аппарата при его штатном или нештатном приводнении. При выборе типа силовой установки аппарата предпочтение отдано электрической силовой установке, питаемой от бортовых аккумуляторов.
Описание технического решения. Сущность технического решения поясняется чертежами, где на рис. 1 показан вид сбоку аппарата, на рис. 2 показан вид сверху, на рис. 3 показано отделение аппарата от борта самолета, на рис. 4 показан аппарат, готовый к переходу в автономный полет.
Модуль оборудования, управления и целевой нагрузки 1 состоит из следующих элементов. Силовое кольцо 3 из стеклопластика закреплено концентрично оси аппарата в центре горизонтально расположенного силового шпангоута 4, выполненного в виде трехслойной композитной конструкции из стеклопластиковых пластин 5, 6, между которыми вклеен пенопласт 7. Горизонтально расположенный силовой шпангоут 4 и силовое кольцо 3 соединены между собой, в том числе и специальными косынками 8 из композита, что в свою очередь позволяет ограничить прогиб горизонтально расположенного силового шпангоута 4. Благодаря трехслойной конструкции горизонтально расположенного шпангоута 4, технологии его соединения с силовым кольцом 3 обеспечиваются разные условия работы слоев 5, 6 и 7, шпангоута. Демпфирование колебаний верхнего слоя 5 относительно нижнего 6 в конечном счете приводит к ослаблению и затуханию колебаний на периферийной части шпангоута, где размещено оборудование аппарата.
Модуль оборудования, управления и целевой нагрузки 1 имеет сферическую оболочку 9, 10 (сферический фюзеляж), выполненную разъемной из стеклопластика в формообразующей матрице в виде полусфер. Верхняя 10 и нижняя 9 полусферы модуля соединены стыковым поясом 11, выполненным из тонколистового алюминиевого сплава, который, в свою очередь, закреплен по контуру периферийной части шпангоута 4 посредством клеевого состава. В местах крепления стыкового пояса 11 со шпангоутом 4 установлены металлопластиковые кронштейны 12, к которым с внешней стороны стыкового пояса крепятся винтами стойки опор шасси. Опоры шасси 13 (4 шт.) выполнены из алюминиевых труб, внутри которых вставлены амортизирующие лапки 14 из пружинной проволоки. Сверху лапки закрыты хлорвиниловой трубкой 15 для исключения контакта лапок 14 с влагой. Нижние части лапок 14 оснащены опорными шайбами 16.
На нижней поверхности трехслойного силового шпангоута посредством амортизирующих втулок установлены специальные кронштейны 17, которые несут блоки и элементы аппаратуры управления, навигации, связи, целевой нагрузки, источники питания бортового радиоэлектронного оборудования и видеокамеры.
Подъемно-маршевый модуль 2 состоит из следующих элементов.
Высокооборотного импеллера 18, в который входят: спрямляющие лопатки 19, корпус импеллера 20, электропривод 21, мотогондола 22 с рулевыми поверхностями управления 23, закрытая обтекателем 24. Под обтекателем 24 установлена видеокамера вертикального обзора 25.
Автоматического воздушного винта с косым шарниром 26, в который входят: воздушный винт 27, электропривод воздушного винта 28, пилоны 29, редуктор 30. Лопасти автоматического воздушного винта с косым шарниром 26 имеют специальные шарниры 31 для обеспечения возможности складываться. В походном положении каждая лопасть переламывается на угол 90 градусов и укладывается по бортам сферического фюзеляжа вдоль вертикальной оси аппарата.
Особенностью автоматического воздушного винта с косым шарниром 26 является то, что горизонтальный шарнир общий на две лопасти и располагается под углом 45 градусов к оси лопастей. Такое устройство втулки обеспечивает автоматическое управление общим шагом винта и не требует отдельного сервопривода.
Автоматическое управление общим шагом воздушного винта 27 состоит в следующем. При максимальной мощности электропривода центробежная сила лопастей наибольшая, поэтому они будут вращаться в плоскости диска винта. В этом случае угол установки лопастей максимальный (расчетный). С уменьшением мощности двигателя падает величина центробежной силы, и плоскость диска винта превращается в конус, конус винта увеличивается. При этом лопасти винта, поднимаясь относительно косого шарнира, уменьшают свой установочный угол. В случае полета на режиме авторотации конусность несущего винта наибольшая, а установочный угол лопастей наименьший.
Работа МЛА в полете. Перед запуском с борта самолета аппарат находится в походном положении в специальном контейнере. После отделения МЛА от борта носителя принудительно выпускаются стабилизирующий парашют 32, затем тормозной парашют 33. Аппарат замедляет скорость, постепенно занимая вертикальное положение. В это же время происходит включение электроприводов 21, 28 подъемно-маршевого модуля 2. Раскручивается импеллер 18, раскладывается воздушный винт 27. Аппарат зависает над исследуемым объектом (гидродромом). Дальнейший полет аппарата осуществляется в автономном управляемом режиме.
Мониторинг акваторий гидродромов производится с использованием видиосистем и метеосенсоров. Основным принципом наблюдения является движение МЛА на малой скорости и его зависание над интересующим объектом взамен поворота видеокамеры по азимуту и углу места. Реализация такого принципа состоит в том, что используются две миниатюрные видеокамеры с разными полями зрения и углами установки. Видеокамеры расположены таким образом, что их поля зрения размещаются на местности последовательно: первая широкоугольная камера – вторая узкоугольная камера.
Алгоритм работы с целевой нагрузкой таков. На наземном, надводном или на борту самолета пункте управления оператор, управляя полетом МЛА, просматривает поверхность через первую широкоугольную видеокамеру (например, водоема, на который планируется произвести приводнение самолета-амфибии). При появлении на изображении подозрительного объекта (обломка потерпевшего аварию судна или полузатопленного бревна) оператор маркирует его щелчком мыши ПЭВМ. МЛА начинает наводиться в горизонтальной плоскости на подозрительный объект. Его изображение постепенно перемещается к вертикальной средней линии всего изображения и приближается (смещается к нижней границе изображения). Изображение объекта становится крупнее. Когда изображение объекта переходит в поле зрения второй видеокамеры вертикального обзора 25, то происходит автоматическое переключение на эту камеру. Оператор постоянно подтверждает свой интерес к подозрительному объекту маркированием его изображения щелчком мыши. Данный сигнал через бортовую САУ формирует команду на уменьшение высоты полета аппарата и его зависание над интересующим объектом. При определенном приближении к объекту оператор распознает его как цель (или как ложную цель). В данном случае на МЛА не исключено применение вариофокальной оптики.
В конечном счете МЛА, зависая над целью, обеспечивает ее полную идентификацию, возможную ее опасность или помеху для осуществления приводнения самолета-амфибии в данном районе.
В процессе пролета и зависания МЛА над целью автоматически запоминаются последовательные изображения цели и окружающей ее местности. Одновременно запоминается сопутствующая метеорологическая, навигационная и пилотажная информация.
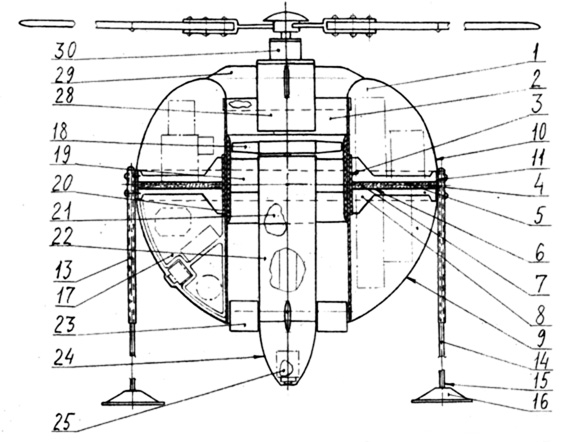
Рис. 1
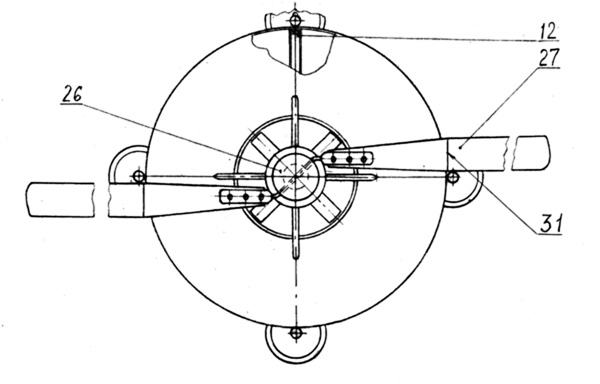
Рис. 2
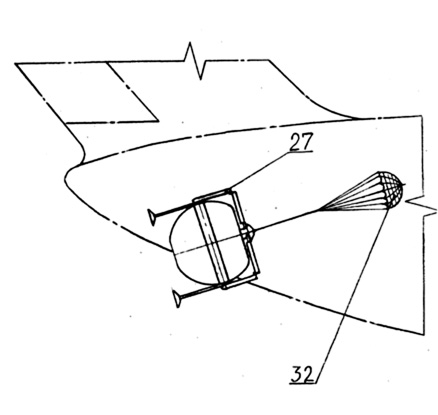
Рис.3
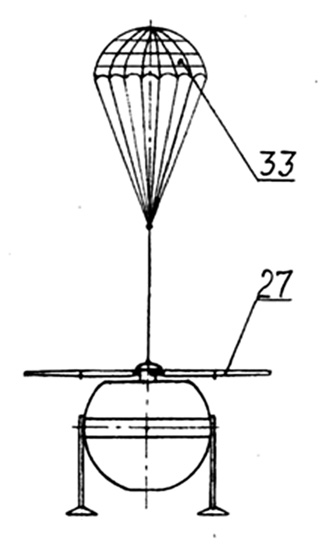
Рис. 4

Рис. 5
После выполнения задания МЛА снижается, затормаживается и производит вертикальную посадку в автоматизированном режиме на ближайшую сухопутную площадку, судно, сети улавливатели или непосредственно на водную поверхность на безопасном расстоянии от места приводнения самолета-амфибии.
Выводы
Переносные комплексы мониторинга водных акваторий (ПКМВА) имеют возможность вести телевизионное наблюдение за водной поверхностью гидродромов и обнаруживать объекты на них. В состав ПКМВА входят беспилотные малоразмерные летательные аппараты (МЛА) со сферическим фюзеляжем, которые могут двигаться в любую сторону, а также зависать над исследуемой зоной. Они способны давать достоверную видеоинформацию, необходимую для обеспечения взлета-посадки на гидродромы гидросамолетов и самолетов-амфибий.
По этим изображениям и сопутствующей информации с борта МЛА можно вычислить координаты и характер цели (обломка потерпевшего аварию судна, полузатопленного бревна или иной помехи на воде), а также состояние водной поверхности в зоне планируемого приводнения, что является основой для принятия необходимого решения. Так как изображения получены при полете над целью, то влияние ошибок измерения ориентации МЛА с видеокамерами и его высоты полета исключительно мало. Ошибка измерения координат цели, по сути, совпадает с ошибкой измерения координат МЛА. При использовании спутниковой радионавигации величина ошибок составляет единицы метров.
Библиографическая ссылка
Воронков Ю.С., Воронков О.Ю. МЛА ДЛЯ МОНИТОРИНГА ВОДНЫХ АКВАТОРИЙ // Современные наукоемкие технологии. 2013. № 12. С. 35-39;URL: https://top-technologies.ru/en/article/view?id=33592 (дата обращения: 16.05.2026).