


Scientific journal
Modern high technologies
ISSN 1812-7320
"Перечень" ВАК
ИФ РИНЦ = 1,279
AIRCRAFT – THE AMPHIBIOUS TILTROTOR

Основные проблемы при создании ЛА ВВП. В числе основных проблем при создании летательных аппаратов вертикального взлета и посадки (ЛА ВВП) отмечаются следующие: обеспечение высокой тяговооруженности ЛА, надежности работы силовых установок, эффективной управляемости аппаратом на всех режимах полета, особенно на переходных режимах. Одной из основных проблем является удовлетворение требованиям заданных летно-технических характеристик ЛА ВВП. Известны несколько подходов к решению данных проблем, которые повлияли на формулировку задач создания ЛА ВВП предлагаемой аэродинамической компоновки.
Задачи проекта. Создание летательного аппарата, имеющего повышенную эффективность на режимах взлета и посадки, особенно в условиях турбулентной атмосферы, с необходимой скороподъемностью при меньших затратах мощности силовых установок. Другой задачей является создание летательного аппарата, обеспечивающего высокую маневренность и широкий диапазон изменения скорости полета вплоть до зависания аппарата в воздухе. Третьей задачей является необходимость придания аппарату амфибийных свойств, обеспечивающих возможность его эксплуатации, как на суше, так и в морских условиях. Четвертой задачей является повышение надежности аппарата и уменьшение его влияния на окружающую среду.
Пути решения. Поставленные технические задачи решаются в результате того, что предлагается летательный аппарат-конвертоплан, содержащий вертикально расположенный фюзеляж с грузовыми отсеками. К фюзеляжу прикреплены попарно расположенные крестообразные крылья малого удлинения, плоскости которых имеют общую ось пересечения. Их четное количество внешними концами прикреплено к вертикально расположенным мотогондолам, оснащенным силовыми установками с управляемыми воздушными винтами, которые образуют в каждой из пересекающихся плоскостей жесткую конструкцию. Каждое из крыльев снабжено адаптивными поверхностями управления с возможностью их автоматической активации согласно требуемым режимам работы силовых установок и противодействию внешним возмущающим факторам в соответствии с реализуемыми объективными синергетическими законами единства процессов адаптации и управления. Нижние части мотогондол аппарата оснащены, наравне с сухопутными опорами шасси, выпускными водоизмещающими взлетно-посадочными средствами изменяемого объема с возможностью их уборки во внутренние полости каждой из мотогондол.
Особенности выбранных решений. Звездообразные крылья аппарата (частным случаем которых являются крестообразные крылья), попарно разнесенные в вертикальных пересекающихся плоскостях, в каждой из них формируют аэродинамическую схему «тандем». Такая схема с распределением аэродинамических сил и моментов на достаточном плече обеспечивает полет аппарата в горизонтальной конфигурации и управление им при взлете, посадке и зависании при минимальной зависимости от внешних возмущающих факторов. Силовые установки с воздушными винтами, находящимися перед каждой из пары крыльев, в горизонтальном полете действуют как тянущие воздушные винты. Они генерируют скоростной воздушный поток, обдувающий с увеличенной скоростью переднюю и кормовую несущие аэродинамические поверхности. Несущие аэродинамические поверхности имеют достаточно большое значение эффективного удлинения и плеча действия управляющих сил и моментов при меньшей относительной толщине аэродинамического профиля. Это позволяет уменьшить значение составляющих полного аэродинамического сопротивления каждого из крыльев. Одинаковый размах несущих аэродинамических поверхностей ограничен мотогондолами. Управление общим шагом воздушных винтов и режимами работы силовых установок – индивидуальные от бортовой САУ. Наличие четного количества лучей звездообразных крыльев, по концам которых размещены силовые установки, обеспечивает уравновешенность реактивного момента от их работы и симметрию тяг. Снабжение каждого из крыльев адаптивными поверхностями управления позволяет получать оптимальные значения аэродинамического качества профиля на всех режимах полета летательного аппарата и обеспечивать необходимую степень его управляемости с минимально необходимыми углами отклонения поверхностей управления. Активация адаптивных поверхностей управления, пропорциональная степени воздействия внешних возмущающих факторов, совместно с автоматическим изменением режимов работы силовых установок в соответствии с реализуемыми синергетическими законами управления (рис. 7) позволит обеспечивать координирующее управление с учетом естественных свойств летательного аппарата как нелинейного объекта механической природы. При этом будут решаться задачи ведения аппарата по заданному маршруту (траектории полета) с контролем его положения по данным, обеспечивающим также его автоматический взлет, посадку и зависание на заданной высоте. Для обеспечения такой стратегии управления аппаратом все переменные параметров его состояния в полученных базовых законах управления его движением приняты наблюдаемыми. В результате использования адаптивных поверхностей управления со специальной адаптивной системой управления для работы на критических режимах будет обеспечен автоматический вывод аппарата из критических режимов полета и предотвращено его попадание в такие режимы [А.А. Колесников. Синергетическая теория управления; М. Энергоатомиздат, 1994].
Силовая установка летательного аппарата в варианте с соосно независимыми приводами воздушных винтов в тяговых кольцах повышает надежность работы всего двигательно-движительного комплекса в целом за счет его резервирования, а также обеспечивает защиту воздушных винтов от внешнего воздействия, повышает их эффективность работы и улучшает шумовые характеристики.
Оснащение нижних частей мотогондол водоизмещающими взлетно-посадочными средствами с возможностью их уборки внутрь мотогондол в полетной конфигурации, возможностью выпуска для обеспечения посадки и удержания аппарата на плаву придает аппарату амфибийные свойства.
Вариант выполнения водоизмещающих взлетно-посадочных средств с расщепляемыми створками нижних частей мотогондол, во внутренних полостях которых закреплены надувные баллонеты (рис. 4, рис. 5), позволяет достаточно просто и надежно обеспечивать плавучесть аппарата, а также обеспечивать возможность поглощения удара при вертикальной посадке на земную поверхность во внештатной ситуации.
Описываемое техническое решение поясняется чертежами и фото:
на рис. 1 – изображен летательный аппарат в режиме вертикального взлета и посадки с суши, вид спереди;
на рис. 2 – изображен вариант летательного аппарата c соосно независимыми приводами воздушных винтов в режиме вертикального взлета и посадки с суши, вид сбоку 1/4;
на рис. 3 – сечение Б-Б адаптивного крыла;
на рис. 4 – летательный аппарат на водной поверхности в варианте обеспечения плавучести надувными баллонетами, вид спереди;
на рис. 5 – летательный аппарат с надувными баллонетами, вид сверху;
на рис. 6 – вид сбоку на аппарат в горизонтальном полете на высоте H
на рис. 7 – функциональная схема системы управления аппаратом;
на рис. 8 – летающая модель аппарата.
Стрелка Н.П. указывает направление полета.
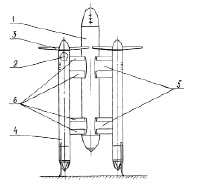
Рис. 1
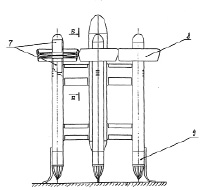
Рис. 2
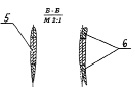
Рис. 3
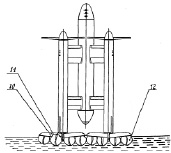
Рис. 4
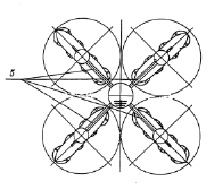
Рис. 5
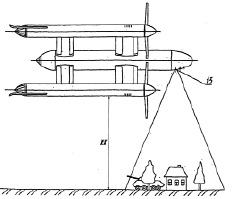
Рис. 6
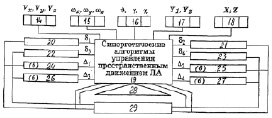
Рис. 7

Рис. 8
Описание и работа аппарата. Описываемый летательный аппарат (рис. 1) содержит фюзеляж 1, силовые установки 2 с воздушными винтами 3 в мотогондолах 4, которые прикреплены к концам попарно разнесенных в пересекающихся вертикальных плоскостях звездообразных крыльев 5, образуя в каждой из плоскостей замкнутую жесткую конструкцию. Каждое из крыльев 5 снабжено адаптивными поверхностями управления 6.
В варианте конструктивного решения (рис.2) каждая из силовых установок 2 содержит в себе по два соосно независимых привода 7 в тяговых кольцах 8.
В варианте конструктивного решения (рис.4) каждое из водоизмещающих взлетно-посадочных средств 9, обеспечивающих взлет и посадку аппарата с водной поверхности, может быть выполнено с расщепляемыми створками 10, во внутренних полостях 11 которых закреплены надувные баллонеты 12.
В носовой и хвостовой частях фюзеляжа 1 размещена целевая нагрузка 13 (рис. 6).
Автоматизированная система управления аппаратом (рис. 7) содержит:
– датчики скорости полета 14 (Vx, Vy, Vz);
– датчики угловых скоростей 15 (wx, wy, wz);
– датчики угловых отклонений 16 (q, g, c);
– датчики высоты полета 17 (Y1, Y2);
– датчики позиционирования (GPS) 18 (X, Z);
– бортовой процессор 19 (БСАУ);
– подсистемы автоматизированного управления силовыми установками 20, 21, 22, 23 (d1, d2, d3, d3);
– адаптивные аэродинамические органы управления ЛА 24, 25, 26, 27 (D1, D2, D3, D4);
– подсистемы ввода информации 28 (заданный маршрут, профиль полета, базовые законы управления);
– командный блок управления ЛА 29.
Летательный аппарат-конвертоплан-амфибия работает следующим образом.
Вертикальный взлет аппарата с суши (рис. 1) выполняется при вертикальном положении фюзеляжа 1 и силовых установок 2. Силовые установки 2 вращают управляемые воздушные винты 3, которые отбрасывают воздушный поток вниз и обеспечивают тем самым отрыв аппарата от поверхности суши. Аппарат зависает на некотором расстоянии от поверхности. После вертикального взлета и зависания аппарат делает горку и переходит в горизонтальный полет. При этом крестообразные крылья 5 на виде спереди ориентированы к вертикали под 45 градусов (рис. 5).
Стабилизация аппарата обеспечивается реализацией заданных синергетических алгоритмов управления пространственным движением аппарата. Управление – путем изменения режимов работы каждой из силовых установок 2 совместно с отклонением управляющих поверхностей 6 таким образом, чтобы возникал требуемый управляющий момент, а суммарная тяга силовых установок при этом не изменялась.
Во всех конфигурациях полета сигналы с датчиков 14 (Vx, Vy, Vz), датчиков 15 (wx, wy, wz), датчиков 16 (q, g, c), датчиков 17 (Y1, Y2), датчиков 18 (X, Z), характеризующих положение и состояние аппарата в пространстве, подаются в бортовой процессор 19, где обрабатываются в соответствии с заданными синергетическими алгоритмами управления пространственным движением аппарата и подаются на подсистемы автоматизированного управления силовыми установками 20 (d1), 21 (d2), 22(d3), 23(d4) и на исполнительные органы адаптивных управляющих поверхностей 24(D1), 25(D2), 26(D3), 27(D4). Продольное управление аппаратом осуществляется путем дифференциального изменения режима работы передних и задних (вид по полету) силовых установок 20, 21 и 22, 23 (d1,d2)≠(d3,d4) одновременно с отклонением соответствующих управляющих поверхностей 24, 25 и 26, 27 (D1, D2)≠(D3,D4). Поперечное – путем дифференциального изменения режима работы силовых установок, расположенных справа и слева 20, 22 и 21, 23 (d1,d4)≠(d2,d3) и с отклонением соответствующих управляющих поверхностей 24, 26 и 25, 27 (D1,D3)≠(D2,D4). Путевое – дифференциальным изменением режима работы накрест расположенных силовых установок 20, 23 и 22, 21 (d1,d4)≠(d3,d2) с отклонением соответствующих управляющих поверхностей 24, 27 и 26, 25 (D1,D4)≠(D3,D2).
Адаптивные управляющие аэродинамические поверхности 6 крыльев 5 могут быть выполнены по аналогии с техническим решением, описанным в патенте РФ № 2162428 от 09.07.1998 г. кл. В64С 33/02 и не будут требовать механических исполнительных устройств.
Подсистема ввода информации 28 позволяет вводить цифровую информацию о заданном профиле, маршруте полета аппарата, законы управления и способы вывода аппарата из критических режимов, программировать реакцию на внешние возмущения. Командный блок управления аппаратом 29 позволяет задавать и корректировать поведение аппарата в соответствии с изменившейся ситуацией в реальном масштабе времени, в том числе в режиме ручного управления.
На аппарате реализована возможность уменьшения потребляемой электроэнергии благодаря его конвертированию – переводу из конфигурации вертикального взлета и посадки, при которой потребление энергии максимально, в конфигурацию горизонтального полета, при котором потребление энергии на борту минимально. Эти процессы обеспечивает бортовая система автоматизированного управления (БСАУ) 19, реализующая заданные синергетические алгоритмы управления. В летательном аппарате используются силовые установки 2 и соосно независимые приводы 7, выполненные на основе высокоэффективных бесколлекторных электрических двигателей постоянного тока с магнитными системами из редкоземельных материалов. Наличие нескольких таких электродвигателей позволяет в соответствии с заданием частично, группами или даже полностью на определенное время отключать их от системы энергоснабжения или производить электронную регулировку их режима работы для обеспечения экономичного полета без демаскирующих признаков. Такие режимы работы характерны для полета в горизонтальной конфигурации. Вариант размещения воздушных винтов 3 в тяговых кольцах 8 повышает эффективность всего двигательно-движительного комплекса, уменьшая влияние внешних возмущающих факторов, улучшая шумовые характеристики винтов 3 и обеспечивая защиту их от посторонних предметов, что особенно важно при выполнении вертикального взлета и посадки аппарата.
Нижние части мотогондол 4 аппарата снабжены выпускными (убираемыми) водоизмещающими взлетно-посадочными средствами 9. Выпуск и формообразование взлетно-посадочных средств 9 осуществляется избыточным давлением газообразной среды, а уборка – вакуумированием их внутренних полостей. В описываемом летательном аппарате применяются взлетно-посадочные средства в виде надувных баллонетов 12, закрепленных во внутренних полостях 11 расщепляемых створок 10. Водоизмещающие свойства баллонетов 12 обеспечиваются заполнением оболочки каждого из них газообразной средой под давлением, в результате чего оболочка принимает заданную форму (например, сферы) и увеличивается в объеме, вытесняя определенный объем воды. Групповое расположение таких баллонетов 12 в нижней части аппарата позволяет обеспечивать его плавучесть. В данном техническом решении надувные баллонеты 12 закреплены во внутренних полостях 11 каждой из расщепляющихся створок 10, что позволяет передавать гидростатическую силу выталкивания от баллонетов 12 через каркас створок 10 на нижние части мотогондол 4 и удерживать, таким образом, аппарат на плаву. В результате того, что расщепляющиеся створки 10 при их раскрытии на 90° уходят от их центральных осей к периферии, вынося тем самым к периферии и баллонеты 12, обеспечивается горизонтально-групповое расположение надувных баллонетов 12 по водной поверхности (рис. 5), и создается необходимая остойчивость аппарата на плаву.
Возможные области применения. Разработка летательного аппарата-конвертоплана-амфибии предназначена для:
– обеспечения подразделений ВМФ, МЧС информацией о ситуациях в зонах предполагаемого проведения операций, наведения десантируемых спасательных средств в зоны терпящих бедствие кораблей, самолетов, космических летательных аппаратов;
– обеспечения ликвидации последствий аварий на взрывопожароопасных объектах, нефтегазопроводах, химически опасных объектах, в зонах разрушения плотин гидроузлов;
– обеспечения проведения антитеррористических, антинаркотических операций, а также специальных операций в интересах ФСБ, МВД, МЧС, спецподразделений Вооруженных сил и т.д. на суше и на водных пространствах;
– обеспечения ликвидации последствий землетрясений, цунами, наводнений, лесных пожаров, ураганов, тайфунов.
Выводы
Таким образом, предложен беспилотный летательный аппарат, в котором использованы новые, современные подходы и технологии:
– предложена новая оригинальная компоновочная схема, ставшая предметом защиты патентом [7].
– предложено использование синергетических законов управления [8] для САУ пространственным движением ЛА, позволяющих в максимальной степени учитывать его динамические свойства как сложного нелинейного объекта.
– описанный аппарат способен вертикально взлетать с водной поверхности и осуществлять на воду вертикальную посадку в сложных метеоусловиях.
Все эти инновации позволяют определить облик летательного аппарата-амфибии вертикального взлета и посадки, способного осуществлять наведение спасательных средств и обеспечивать проведение спасательных операций, как на суше, так и в морских условиях.
Библиографическая ссылка
Воронков Ю.С., Воронков О.Ю. ЛЕТАТЕЛЬНЫЙ АППАРАТ-КОНВЕРТОПЛАН-АМФИБИЯ // Современные наукоемкие технологии. 2013. № 11. С. 12-18;URL: https://top-technologies.ru/en/article/view?id=33515 (дата обращения: 20.06.2026).