


Scientific journal
Modern high technologies
ISSN 1812-7320
"Перечень" ВАК
ИФ РИНЦ = 1,279
Correction of the Amplitudes and Geometrical distortions of the Hydroacoustic Images of a Sea-bottom

Принцип формирования гидроакустического изображения заключается в следующем: носитель, на котором размещаются приемно-передающие антенны, буксируется с помощью кабель - троса на определенной глубине за судном или выносится за борт при помощи специального выносного устройства. Антенны формируют акустический луч под углом 90 градусов к курсу следования по обе стороны. Этот луч распространяется в воде и отражается некоторой частью морского дна. Вследствие неравномерности дна и наложения объектов, часть энергии звука отражается назад в направлении источника. Приемный тракт ГБО имеет достаточную чувствительность, чтобы получить эти отражения, усилить их и послать блоку обработки данных и регистратору.
Форма луча ГБО имеет значение для формирования конечного изображения и зависит от диаграммы направленности антенны. В рассматриваемом ГБО формируется акустический луч, очень узкий в вертикальной плоскости (0,9 градусов) и намного более широкий (45 градусов) в горизонтальной плоскости. Антенны располагаются на корпусе подводного носителя под определенным углом к вертикальной оси, что дает возможность получения эхо - сигналов от некоторой просматриваемой зоны дна. Для формирования гидроакустического изображения используются звуковые отражения от дна и объектов. Наклонные дальности до объектов определяются как половина произведения скорости звука в воде на интервал времени между излучающим и принимаемым сигналами. Эта дальность регистрируется как одна точка на изображении, и множество точек от разных отражающих объектов составляют одну строку изображения, а множество строк, полученных при движении судна, составляют совокупное изображение рельефа дна. Результаты съемки отображаются в черно-белых оттенках, а также, при применении цифрового процессора, в цветном виде с использованием ложных цветов. Черно-белое изображение фиксируется на бумаге, на которой сильные отражатели показываются как темные области, а слабые - как белые. С фотографической точки зрения подобное изображение кажется "негативом". Современная система обработки позволяет при необходимости переводить такое изображение в позитив.
Типичное изображение ГБО содержит множество особенностей, которые должны быть распознаны оператором системы и интерпретатором данных [2]. К таким особенностям относятся следующие: водяной столб, импульс излучения, первое отражение от дна, цели и топографические детали, тени. Акустическая отражающая способность данного сектора морского дна определяется материальными свойствами просматриваемой области. Скала и гравий - лучшие отражатели, чем песок или ил и поэтому выглядят более темными на изображениях морского дна. Физическая форма индивидуальных компонентов материалов сильно влияет на обратное отражение. Топография морского дна также определяет энергию отраженного звукового луча. Наклоны дна в сторону носителя - гораздо лучшие отражатели, чем наоборот, из-за меньшего угла сферы действия импульса излучения.
Топография с меньшим углом сферы действия кажется темной на записи. Обобщая все вышесказанное, можно сделать вывод о том, что сигналу ГБО, отраженному от дна и объектов, присущи амплитудные и геометрические искажения. Амплитудные искажения возникают вследствие неравномерности диаграммы направленности приёмо-передающей антенны ГБО и вследствие изменения угла скольжения акустического луча по дну вдоль развертки строки эхо - сигнала и вызываемого этим изменением коэффициента отражения. Геометрические искажения возникают при попытке составления двухмерного плана дна, когда наклонные дальности до дна и объектов переводятся в горизонтальные дальности. Вопросы коррекции искажений сигнала ГБО в условиях горизонтального дна рассматриваются в работе [3]. Однако, в реальных условиях, дно не горизонтально и может иметь уклон.
Влияние уклона дна на эхо-сигнал
К основным параметрам сигнала, изменяющимся при имеющемся уклоне дна, в сравнении с горизонтальным, относятся следующие:
- а) изменение расстояния до объекта;
- б) изменение угла падения акустического луча;
- в) изменение эффективной площади отражающего участка;
- г) изменение размеров участка дна, попадающего в зону обзора антенны с постоянной диаграммой направленности.
На рис.1 приведен сектор морского дна, имеющий определенный уклон в полосе обзора. На этом рисунке и далее в тексте приняты следующие обозначения:
θ0 - угол наклона оси диаграммы направленности антенны относительно вертикали;
θ - угол между рассматриваемым лучом и вертикальной осью;
θmin и θmax - углы, соответствующие началу и концу зоны обзора;
α и γ - соответственно, углы скольжения и падения луча;
φ- угол раскрыва диаграммы направленности антенны в вертикальной плоскости (на уровне 0,7);
β - угол наклона дна относительно горизонтали; c - скорость распространения звука в водной среде; t - длительность излучающего сигнала; R и L - соответственно, наклонная и горизонтальная дальности до отражающих участков; h - высота носителя антенн надо дном.
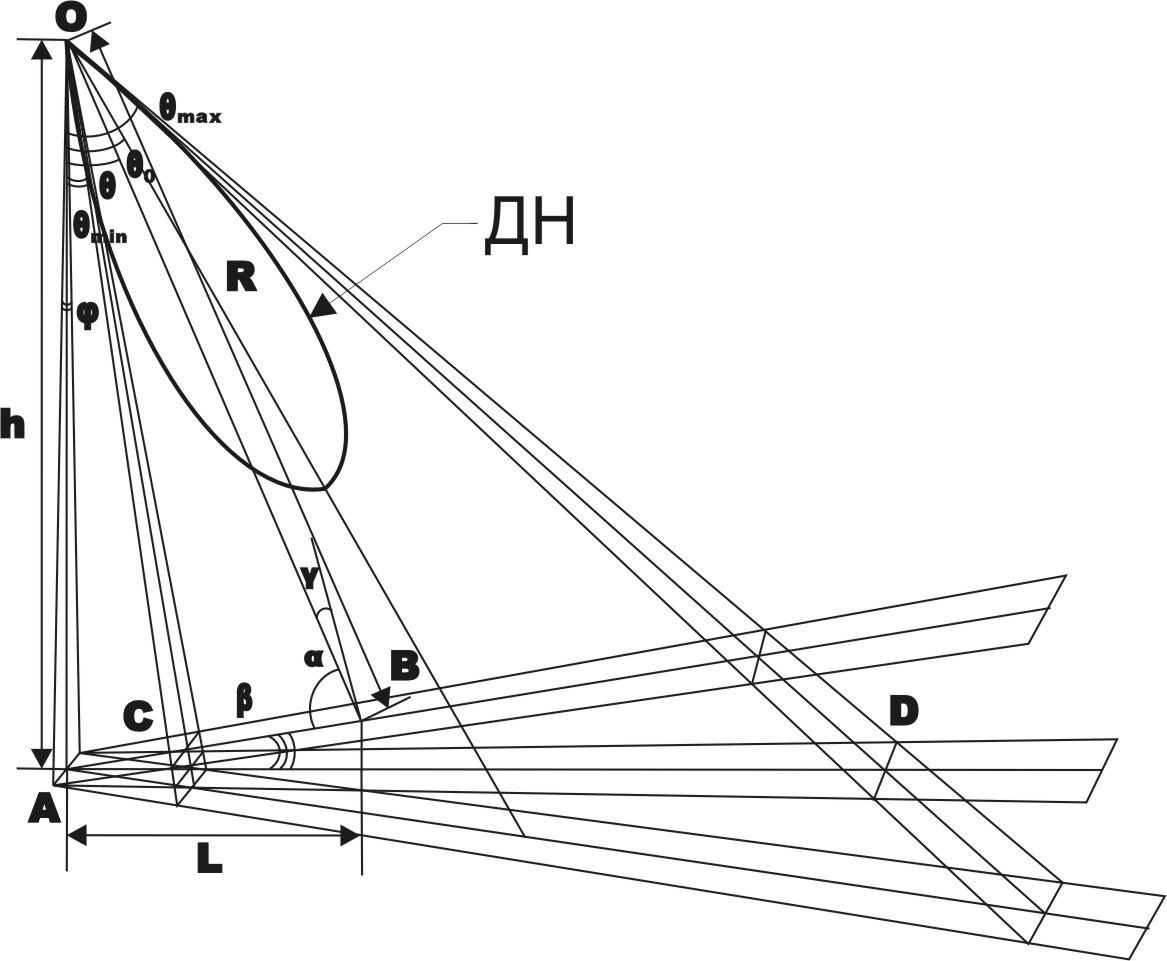
Рисунок 1. Полоса обзора дна.
ДН - диаграмма направленности антенны, O - точка расположения антенны, A - проекция антенны на дно, CD - полоса обзора, OB - произвольный луч.
Из геометрии рисунка выводятся формулы для определения параметров, учитываемых при проведении коррекции искажений акустического изображения сигнала.
Расстояние до объекта:
R = c . t /2 (1)
Угол излучения рассматриваемого луча относительно вертикали:
 (2)
(2)
Угол излучения луча относительно оси диаграммы направленности антенны равен разности θ0 - θ.
Горизонтальная дальность до объектов равна:
L = R.sinθ (3)
или:
![]() (4)
(4)
или:
![]() (5)
(5)
Угол скольжения равен:
 (6)
(6)
Угол падения равен:
 (7)
(7)
Формула для геометрической коррекции выведена при следующих допущениях. Каждая строка изображения содержит эхо - сигналы, полученные при углах излучения от θmin до θmax, и в строке имеется N отсчетов эхо - сигнала, i - номер отдельно взятого отсчета; i = 0...N-1. Тогда i-тому отсчету можно сопоставить эхо - сигнал, соответствующий отражению от участка, наклонная (горизонтальная) дальность до которого равна R[i] (L[i]). Пусть, кроме того, максимальные и минимальные наклонные и горизонтальные дальности до отражающих участков будут, соответственно, Rmax, Rmin, Lmax, Lmin, равные выражениям:
 (8)
(8)
![]() (9)
(9)
![]() (10)
(10)
![]() (11)
(11)
Вдоль строки наклонные дальности увеличиваются с постоянным шагом ΔR, равным:
![]() (12)
(12)
Тогда можно представить i-тый отсчет как:
![]() (13)
(13)
Напротив, горизонтальные дальности вследствие нелинейных преобразований при расчете не имеют постоянного шага изменения, а имеют тенденцию уменьшения его с разверткой строки, что обуславливает необходимость геометрической коррекции. Тогда позиция i-го отсчета X[i] на изображении, имеющем ширину w и отображающем геометрически откорректированную картину участка подводного рельефа, будет равна:
 (14)
(14)
где:
 (15)
(15)
Данная формула позволяет проводить геометрическую коррекцию в реальном режиме времени. Для отложенной во времени коррекции подходит более простая формула (5) {вместе с (14)}. В частности, при =0 и =0 формула (14) приобретает вид [3]:
 (16)
(16)
где αmin - значение угла скольжения в конце зоны обзора.
Алгоритм проведения коррекции
Запуск программы коррекции. Ввод начальных значений (θ0, θmin,θmax). Затем для всех строк изображения осуществляется следующая последовательность действий:
- Ввод значений h, b, N.
- Для всех элементов одной строки изображения осуществляется следующая последовательность действий:
- определение времени прихода отраженного сигнала t;
- определение наклонной дальности до объекта R;
- определение углов θ, θ0 - θ. Расчет коэффициента направленности рассматриваемого акустического луча K(θ0 - θ). При превышении им определенного порогового значения (допустим, 0,7) уменьшение яркости изображения (на позитиве) на соответствующий коэффициент;
- определение угла скольжения. При уменьшении его ниже порогового уровня (согласно закону Ламберта, ниже 45°) увеличение яркости изображения (на позитиве) на соответствующий коэффициент;
- проведение геометрической коррекции: определение горизонтальной дальности до рассматриваемого участка; затем отображение выбранного элемента, для которого уже осуществлена амплитудная коррекция, в рассчитанной позиции.
Методы учета уклона дна
Коррекция сигнала по выведенным выражениям может быть осуществлена в реальном режиме времени, если априорно известны значения углов уклона дна в зоне съемки. Для уменьшения погрешностей предлагаемого метода целесообразно прокладывать курс так, чтобы судно проходило над точками перегиба дна водоема. Если же мы не располагаем информацией о глубинах в обследуемых районах, то во время съемок все результаты сохраняются в памяти, и обработка откладывается до момента точного определения уклона дна. В течение съемок же необходимо фиксировать точную глубину водоема во всех точках следования судна при помощи эхолоцирования. При проведении комплексных работ, когда важна информация не только о рельефе дна, но и его структуре, может быть применена гидроакустическая система, состоящая из ГБО, а также из геолокатора - профилографа, что исключает необходимость эхолоцирования.
Профилограф, исследуя структуру дна, также снабжает информацией о глубине моря. Проведением нескольких галсов судна, и географической привязкой получаемых изображений гидро - и геолокатора, можно получить точные значения глубины и вычислить средние значения уклона дна, рельеф которого представляется после обработки изображения ГБО. Если H1 и H2 - глубины при различных галсах, а Lg - межгалсовое расстояние, то угол уклона будет равен:
 (17)
(17)
Применение данного метода ограничено предельным значением угла уклона дна, поскольку логика формирования гидроакустического изображения требует, чтобы отражающие участки дна с большей горизонтальной дальностью имели бы и большую наклонную дальность, иначе возникает неоднозначность в определении местоположения отражающего участка. Тогда форма рельефа может быть описана уравнением спирали с центром в точке излучения в четвертом квадранте полярных координат. Соответственно, максимальный угол наклона дна, при котором не нарушается вышеуказанный принцип соответствия наклонных и горизонтальных дальностей, можно определить как угол наклона касательной к этой спирали в точке, соответствующей началу зоны обзора. Решая совместно уравнения спирали и касательной, получим следующее выражение для максимального угла уклона дна:
 (18)
(18)
В частности, при θmin=30° βmax=18°. На практике реальные значения углов уклона дна в шельфовой зоне редко превышают полученные значения βmax . В частности, в Каспийском море, в районе Нефтяных Камней средний уклон равен 3° - 5°, и поэтому данный метод использован при составлении программы мониторинга шельфовой зоны Каспийского моря.
Литература
- А.С. №1230427 G01 S15/89, БИ №22, 1986 (СССР). Гидролокационная система регистрации и обработки информации / Т.К.Исмайлов, Т.И.Низамов, Р.К.Кулизаде и др.
- J.P. Fish. Acoustic and Sonar Primer. http://www.instituteformarineacoustics.org/SonarPrimer/SideScanSonar.htm
- Низамов Т.И. "Метод контроля экологического состояния водной среды с помощью акустических средств" // Успехи современного естествознания, 2003, №7, с.29-32.
Библиографическая ссылка
Низамов Т.И., Кулизаде Р.К., Исаев Э.И. КОРРЕКЦИЯ АМПЛИТУДНЫХ И ГЕОМЕТРИЧЕСКИХ ИСКАЖЕНИЙ ГИДРОАКУСТИЧЕСКИХ ИЗОБРАЖЕНИЙ МОРСКОГО ДНА // Современные наукоемкие технологии. 2004. № 1. С. 12-15;URL: https://top-technologies.ru/en/article/view?id=21525 (дата обращения: 03.07.2026).