



Введение
Работа современных систем обеспечивается достаточно большим множеством внутренних элементов [1–3]. Зачастую эти элементы скрыты, и можно увидеть только результат их работы, представленный выходными сигналами системы. Отсюда возникает задача определения состояний, в которых находятся внутренние элементы системы, и определение влияния наборов этих состояний на выходные сигналы системы [4–6]. Такие задачи хорошо описываются скрытыми марковскими моделями (СММ).
СММ позволяют получать информацию о скрытых процессах, протекающих в системе, по имеющимся данным о выходных сигналах системы и о распределении возможности нахождения элементов системы в определенном наборе состояний [7; 8]. Такие задачи зачастую возникают при моделировании работы технических систем, например систем электроэнергетики [9], радиоэлектронной аппаратуры, датчиков расхода теплоносителя реактора АЭС [10] и т. п. СММ позволяют находить для системы вероятность получения последовательности выходных сигналов, наиболее вероятный набор состояний элементов, который привел к такой выходной последовательности.
Цель исследования – построить математическую модель технической системы из трех элементов, обучить модель с целью максимально увеличить вероятность получения последовательности выходных сигналов.
Материал и методы исследования
Рассмотрим следующую систему из трех элементов: два элемента системы работают параллельно, а третий соединен с ними последовательно (рис. 1). Система находится в рабочем состоянии, если работает элемент 3 и если работает хотя бы один из элементов 1 или 2. После поломки элементы переходят в состояние восстановления. Если элемент 3 находится в режиме восстановления, то элементы 1 и 2 отключаются. Если элементы 1 и 2 оба находятся в режиме восстановления, то элемент 3 отключается.
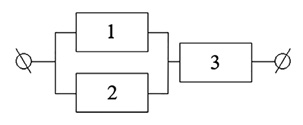
Рис. 1. Система из трех элементов Примечание: составлен автором по результатам исследования
Будем считать, что время работы каждого элемента задается показательным распределением:
f(x) = λe–λx.
Для каждого элемента зададим ожидаемое время работы без сбоев αi, i = 1,2,3, оно будет являться математическим ожиданием [11]:
Mαi = 1 / λi .
После того, как элемент выработает свое время αi, он переходит в режим восстановления. Режим восстановления также описывается показательным распределением. Для режима восстановления обозначим показательную функцию как g(x):
g(x) = μe–μx.
Для каждого элемента зададим ожидаемое время восстановления βi, i = 1,2,3, оно будет являться математическим ожиданием:
Mβi = 1 / μi .
Положим, что система в начальный момент времени всегда находится в состоянии, когда работают все три элемента. Обозначим через S1 первоначальное состояние системы. Также будем считать, что в первоначальное состояние невозможно попасть из других состояний системы. По мере работы системы она начинает переходить из первоначального состояния в другие состояния. Обозначим состояния, в которых может находиться система Sklmn, где k – номер элемента, в котором произошло изменение для перехода в это состояние, l. m, n – состояния, в котором находятся элементы 1, 2, 3 соответственно после изменения (в текущий момент). Элементы могут находиться в одном из трех состояний: 1 – элемент работает, 0 – элемент находится на восстановлении, 2 – элемент отключен.
Рассмотрим переходы системы из одного состояния в другое. Из состояния S1 система может перейти в состояния S1011, S2101 и S3220. Состояние S1011 означает, что изменение произошло в элементе 1, и после изменения элемент 1 находится на восстановлении, а элементы 2 и 3 работают (рис. 2, а). Состояние S2101 – изменение в элементе 2, и после изменения элемент 2 находится на восстановлении, а элементы 1 и 3 работают (рис. 2, б). Состояние S3220 – изменение произошло в элементе 3, и после изменения элемент 3 находится на восстановлении, а элементы 1 и 2 отключены (рис. 2, в).
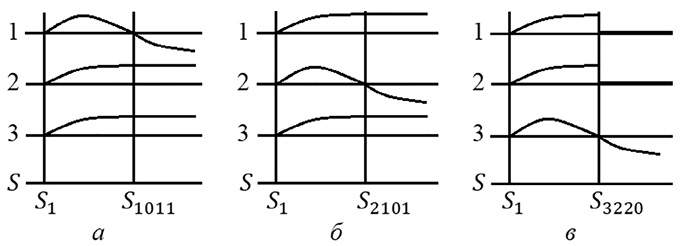
Рис. 2. Переходы из состояния S1 Примечание: составлен автором по результатам исследования
Таблица 1
Таблица состояний системы Si и вероятностей Pij возможных переходов
|
Состояние системы Si |
Состояния системы Sj, в которые можно перейти из Si |
Вероятности перехода Pij |
|
S1 |
S1011 |
λ1 / (λ1 + λ2 + λ3) |
|
S2101 |
λ2 / (λ1 + λ2 + λ3) |
|
|
S3220 |
λ3 / (λ1 + λ2 + λ3) |
|
|
S1111 |
S1011 |
λ1 / (λ1 + λ2 + λ3) |
|
S2101 |
λ2 / (λ1 + λ2 + λ3) |
|
|
S3220 |
λ3 / (λ1 + λ2 + λ3) |
|
|
S1011 |
S1111 |
μ1 / (μ 1 + λ2 + λ3) |
|
S2002 |
λ2 / (μ1 + λ2 + λ3) |
|
|
S3020 |
λ3 / (μ1 + λ2 + λ3) |
|
|
S1101 |
S1002 |
λ1 / (λ1 + μ2 + λ3) |
|
S2111 |
μ2 / (λ1 + μ2 + λ3) |
|
|
S3200 |
λ3 / (λ1 + μ2 + λ3) |
|
|
S1002 |
S1101 |
μ1 / (μ1 + μ2) |
|
S2011 |
μ2 / (μ1 + μ2) |
|
|
S1220 |
S3111 |
1 |
|
S2111 |
S1011 |
λ1 / (λ1 + λ2 + λ3) |
|
S2101 |
λ2 / (λ1 + λ2 + λ3) |
|
|
S3220 |
λ3 / (λ1 + λ2 + λ3) |
|
|
S2011 |
S1111 |
μ1 / (μ1 + λ2 + λ3) |
|
S2002 |
λ2 / (μ1 + λ2 + λ3) |
|
|
S3020 |
λ3 / (μ1 + λ2 + λ3) |
|
|
S2101 |
S1002 |
λ1 / (λ1 + μ2 + λ3) |
|
S2111 |
μ2 / (λ1 + μ2 + λ3) |
|
|
S3200 |
λ3 / (λ1 + μ2 + λ3) |
|
|
S2002 |
S1101 |
μ1 / (μ1 + μ2) |
|
S2011 |
μ2 / (μ1 + μ2) |
|
|
S2220 |
S3111 |
1 |
|
S3111 |
S1011 |
λ1 / (λ1 + λ2 + λ3) |
|
S2101 |
λ2 / (λ1 + λ2 + λ3) |
|
|
S3220 |
λ3 / (λ1 + λ2 + λ3) |
|
|
S3011 |
S1111 |
μ1 / (μ1 + λ2 + λ3) |
|
S2002 |
λ2 / (μ1 + λ2 + λ3) |
|
|
S3020 |
λ3 / (μ1 + λ2 + λ3) |
|
|
S3101 |
S1002 |
λ1 / (λ1 + μ2 + λ3) |
|
S2111 |
μ2 / (λ1 + μ2 + λ3) |
|
|
S3200 |
λ3 / (λ1 + μ2 + λ3) |
|
|
S3200 |
S2220 |
μ2 / (μ2 + μ3) |
|
S3101 |
μ3 / (μ2 + μ3) |
|
|
S3020 |
S1220 |
μ1 / (μ1 + μ3) |
|
S3011 |
μ3 / (μ1 + μ3) |
|
|
S3220 |
S3111 |
1 |
Примечание: составлена автором на основе полученных данных в ходе исследования.
Аналогично можно рассмотреть переходы из всех возможных состояний системы. Обозначим Pij – вероятность перехода из состояния Si в состояние Sj. Тогда можно посчитать вероятности перехода из состояния S1 по формулам [12]:




Аналогично считаются все остальные вероятности перехода Pij. В табл. 1 приведены все возможные состояния системы и состояния, в которые из них можно перейти с вероятностями Pij. Если из состояния Si нельзя перейти в состояние Sj, то Pij = 0. Заметим, что сумма вероятностей перехода из одного состояния Si равна 1.
На основе полученных вероятностей строится матрица вероятностей переходов из состояния Si в состояние Sj:
Далее рассмотрим решение трех основных задач СММ для описанной системы [13–15].
Задача 1. Пусть S = S1,S2,…,Si, i = 1,…,N – возможные состояния системы,
O = O1,O2,…,Ot, t = 1,…,T – последовательность, которую можно наблюдать при работе системы, Ot – выходные символы из известного алфавита Vk . Также считается известным матрица вероятностей переходов A = {Pij}, матрица вероятностей появления символов B = {bj(k)}, bj(k) – вероятность того, что в момент времени t система, которая находится в состоянии Sj, будет выдавать k-й символ из алфавита Vk, и распределение вероятностей первоначального состояния πi, i = 1,…,N  .
.
Необходимо найти вероятность P(O) того, что последовательность O была получена при работе заданной системы.
Задача 2. Для заданной системы найти последовательность состояний
 ,
,
которая наиболее соответствует наблюдаемой выходной последовательности O.
Задача 3. Обучить построенную модель таким образом, чтобы максимизировать вероятность P(O) для выходной последовательности O, подобрав параметры системы A, B и π.
Алгоритмы для решения этих задач подробно описаны в источнике [13] и реализованы автором в программе, написанной на языке Python.
Результаты исследования и их обсуждение
Для расчетов положим алфавит
Vk = {ʺне работаетʺ, ʺработаетʺ}.
Для упрощения представления положим
V0 = ʺне работаетʺ=0, V1=ʺработаетʺ=1.
Тогда для каждого состояния Si можно задать вероятности появления символов bj(Vk). Зададим их следующим образом:
 ,
,
если хотя бы один из индексов l, m, n в номере состояния равен 2 (то есть система находится в состоянии V0), иначе
 .
.
Поскольку предполагаем, что изначально система находится в состоянии S1, то распределение вероятностей первоначального состояния π1 = 1 и πi = 0, i = 2,…,N.
Положим время работы α1 = α2 = 100 ч, α3 = 120 ч, время восстановления β зададим так, чтобы β3 было меньше β1 и β2.
Выходная последовательность O, которую можно наблюдать при работе системы, тогда будет представлять собой набор символов из алфавита Vk. Будем считать, что последовательность O всегда начинается с символа ʺработаетʺ. Значения выходной последовательности фиксируются в момент смены состояния, следовательно, не может быть подряд более двух символов ʺне работаетʺ (по табл. 1 возможны всего два таких случая: когда происходит переход из состояния S3200 в S2220, и из состояния S3020 в S1220).
Пусть O = {1,0,1,1,1,0,1,0,1,1}.
В табл. 2 представлены вероятности P(O) того, что последовательность O получена при работе заданной системы при различных значениях βi.
Таблица 2
Вероятность P(O) в зависимости от времени восстановления βi
|
β1 |
β2 |
β3 |
P(O) |
|
15 ч |
12 ч |
5 ч |
0,0095 |
|
12 ч |
15 ч |
5 ч |
0,0095 |
|
10 ч |
8 ч |
1 ч |
0,0103 |
|
5 ч |
4 ч |
1 ч |
0,0111 |
Примечание: составлена автором на основе полученных данных в ходе исследования.
Таблица 3
Последовательность состояний Q в зависимости от времени восстановления β
|
β1 |
β2 |
β3 |
Q |
|
15 ч |
12 ч |
5 ч |
1, 3220, 3111, 1011, 2111, 3220, 3111, 3220, 3111, 1011 |
|
12 ч |
15 ч |
5 ч |
1, 3220, 3111, 1011, 1111, 3220, 3111, 3220, 3111, 1011 |
|
10 ч |
8 ч |
1 ч |
1, 3220, 3111, 1011, 2111, 3220, 3111, 3220, 3111, 1011 |
|
5 ч |
4 ч |
1 ч |
1, 3220, 3111, 1011, 2111, 3220, 3111, 3220, 3111, 1011 |
Примечание: составлена автором на основе полученных данных в ходе исследования.
Таблица 4
Значения матрицы B после обучения
|
B |
|
|
B1 |
|
|
B5 |
|
|
B10 |
|




Примечание: составлена автором на основе полученных данных в ходе исследования.
В табл. 3 представлены последовательности состояний Q, которые наиболее соответствуют наблюдаемой последовательности O, для различных значений β.
Далее проведем обучение модели.
Положим β1 = 15 ч, β1 = 12 ч, β1 = 5 ч, O = {1,0,1,1,1,0,1,0,1,1}. После обучения получим новые матрицы A, B, π и вероятность P(O). В табл. 4 приведены исходная матрица B и матрица B после одного цикла обучения (B1), после пяти циклов обучения (B5) и после десяти циклов обучения (B10).
Из табл. 5 видно, что модель стремится исключить ошибки, которые изначально были допущены в вероятностях выборов символов. Аналогично изменяется матрица вероятностей переходов A.
Таблица 5
Значения вероятностей P(O) после обучения
|
P(O) |
0,0095 |
|
P1(O) |
0,1167 |
|
P5(O) |
0,1525 |
|
P10(O) |
0,8551 |
|
P14(O) |
1,0 |
Примечание: составлена автором на основе полученных данных в ходе исследования.
Таблица 6
Количество итераций для наблюдаемых выходных последовательностей O
|
Наблюдаемая последовательность O |
Количество итераций |
|
|
13 |
|
|
6 |
|
|
25 |
|
|
47 |
|
|
36 |
|
|
5 |
|
|
41 |




Примечание: составлена автором на основе полученных данных в ходе исследования.
В табл. 5 приведены вероятность P(O) и вероятности P1(O), P5(O), P10(O), P14(O) после 1, 5, 10 и 14 шагов обучения соответственно.
Таким образом, проводя итерационно обучение модели, можно получить матрицы A, B, π, для которых вероятность P(O) будет стремиться к единице.
В табл. 6 представлено количество итераций для различных наблюдаемых выходных последовательностей O, за которые P(O) будет сходиться к единице с погрешностью ε = 10–6 (β1 = 15 ч, β1 = 12 ч, β1 = 5 ч).
Также рассмотрим количество итераций для фиксированной последовательности O = {1,0,1,1,1,0,1,0,1,1} и различных значений β (результаты приведены в табл. 7).
Таблица 7
Количество итераций в зависимости от времени восстановления βi
|
β1 |
β2 |
β3 |
Количество итераций |
|
15 ч |
12 ч |
5 ч |
13 |
|
12 ч |
15 ч |
5 ч |
13 |
|
10 ч |
8 ч |
1 ч |
13 |
|
5 ч |
4 ч |
1 ч |
15 |
Примечание: составлена автором на основе полученных данных в ходе исследования
То есть обучение модели происходит за небольшое количество итераций, что позволяет проводить его достаточно быстро. Такое обучение может использоваться для подбора наилучших параметров элементов системы на основе новых матриц A, B, π.
Заключение
На основании проведенного исследования можно сделать вывод, что разработанная модель позволяет анализировать состояния скрытых элементов системы и проводить обучение модели, которое, в свою очередь, позволяет переопределить задаваемые параметры модели (λi и μi) таким образом, чтобы вероятность появления выходной последовательности символов была максимальной. Такая модель может быть использована для предварительного анализа при последующей инженерной валидации. В дальнейшем планируется рассмотреть системы более сложной структуры, а также системы, в которых у одного или нескольких элементов есть резерв времени.
Конфликт интересов
Финансирование
Библиографическая ссылка
Даева С.Г. ПРИМЕНЕНИЕ СКРЫТЫХ МАРКОВСКИХ МОДЕЛЕЙ ДЛЯ АНАЛИЗА СОСТОЯНИЙ ТРЕХЭЛЕМЕНТНОЙ СИСТЕМЫ // Современные наукоемкие технологии. 2026. № 6. С. 75-81;URL: https://top-technologies.ru/ru/article/view?id=40819 (дата обращения: 03.07.2026).
DOI: https://doi.org/10.17513/snt.40819