



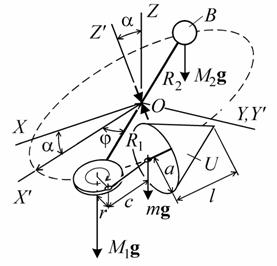
Измерительная система представляет собой систему из четырех тел, способных совершать вращательно-колебательное движение в плоскости X/OY/, наклоненной под малым углом α по отношению к горизонтальной плоскости XOY (рис. 1) . Конусообразное тело U массой m, радиусом основания a и длиной образующей l, совершающее гармонические колебания при большой величине отношения c/r длины ведомого звена c к длине ведущего r кривошипно-шатунного механизма, является основной частью вибрационного ЛА. Его вторая необходимая часть - кривошипно-шатунный механизм массой M1, создающий гармонические колебания с частой f и амплитудой r, жестко соединен при помощи легкого стержня длиной R1+R2 с балансиром B массой M2. Если j - угол поворота колебательной системы относительно положения равновесия, то вибрационная сила, в данном случае играющая роль подъемной, определяется выражением
![]() .
.
Угол наклона α определяется соотношением
![]() ,
,
описывающим период T0 затухающих собственных колебаний системы в установившемся режиме. Здесь J -момент инерции системы относительно оси вращения OZ/.
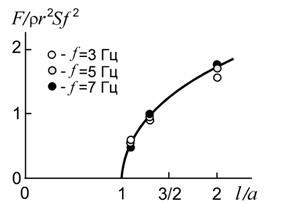
Поскольку подъемная сила при прочих равных условиях должна быть пропорциональна квадрату частоты f, квадрату амплитуды колебаний r и площади сечения конусообразного тела S=πa2, то экспериментальные результаты целесообразно представить в виде безразмерной автомодельной зависимости (рис. 2). С другой стороны, вибрационное перемещение симметричного тела, совершающего гармонические колебания, невозможно. Поэтому, при l=a подъемная сила должна быть равна нулю. Все это дает возможность весь массив экспериментальных данных описать одной единственной зависимостью:
![]() , (*)
, (*)
где С=1.73, ρ - плотность воздуха. Отсюда следует достаточно важный вывод: увеличение параметра асимметрии зонтообразного (несимметричного) тела не приводит к существенному увеличению подъемной силы. Единственный способ увеличить подъемную силу при условии экономии затрачиваемой на вибрационное перемещение мощности - существенное увеличение коэффициента аэродинамического сопротивления.
|
|
|
|
Рис. 1. Вращательно-колебательное движение зонтообразного тела |
Рис. 2. Подъемная сила F, частота f и параметры крыла l, a. Сплошная кривая - зависимость (*), точки - результаты измерений |
СПИСОК ЛИТЕРАТУРЫ
- Нагаев Р.Ф., Тамм Е.А. Вибрационное перемещение в среде с квадратичным сопротивлением движению. // Машиноведение. 1980. № 4.
- Герасимов С.А. Аэродинамика зонтообразного тела с квадратичным сопротивлением движению. // Полет. 2006. № 10.
- Герасимов С.А. Об определении подъемной силы вибрационного летательного аппарата. // Естественные и технические науки. 2005. № 6.
- Герасимов С.А. Вибролет на привязи: подготовка к эксперименту. // Учебная физика. 2008. № 1.
Библиографическая ссылка
Герасимов С.А. ПОДЪЕМНАЯ СИЛА ВИБРАЦИОННОГО ЛЕТАТЕЛЬНОГО АППАРАТА // Современные наукоемкие технологии. 2010. № 4. С. 75-76;URL: https://top-technologies.ru/ru/article/view?id=24651 (дата обращения: 29.06.2026).