


Scientific journal
Modern high technologies
ISSN 1812-7320
"Перечень" ВАК
ИФ РИНЦ = 1,279
MULTI-AGENT APPROACH TO AUTOMATING THE END-TO-END PROCESS OF ROAD CONDITION ASSESSMENT AND SAFE SPEED CALCULATION

Введение
Современные задачи транспортного моделирования и оценки дорожных условий характеризуются высокой сложностью, необходимостью обработки разнородных данных и выполнением множества взаимосвязанных вычислительных операций. Традиционные подходы к автоматизации, основанные на монолитной архитектуре, обладают рядом существенных ограничений: низкая отказоустойчивость (сбой в одном модуле останавливает весь процесс), сложность масштабирования при росте объемов данных и неоптимальное использование вычислительных ресурсов [1, 2].
Развитие методов искусственного интеллекта открывает новые возможности для построения распределенных интеллектуальных систем [3, 4]. Особый интерес представляет парадигма мультиагентных систем, в рамках которой сложная задача декомпозируется на множество автономных, кооперирующихся агентов, каждый из которых специализируется на решении конкретной подзадачи [5]. Такой подход позволяет реализовать распределенное автоматизированное управление процессом, повысить отказоустойчивость и гибкость системы [6].
Цель исследования – разработка мультиагентного подхода к автоматизации сквозного процесса оценки дорожных условий и расчета безопасных скоростей движения.
Научная новизна работы заключается в создании архитектуры кооперирующихся интеллектуальных агентов с разделением ролей, исследовании протоколов их взаимодействия и разработке методов разрешения конфликтов при параллельном выполнении задач с формализацией (аксиоматизацией) проектных решений и правил взаимодействия. Актуальность исследования обусловлена необходимостью создания отказоустойчивых, масштабируемых систем автоматизации для решения комплексных инженерных задач в условиях растущих объемов данных и требований к скорости вычислений [7, 8].
Материал и методы исследования
В основе методологии проектирования лежит агентно-ориентированная парадигма, предполагающая декомпозицию сложной задачи на множество автономных, слабо связанных компонентов – агентов, взаимодействующих через специализированные протоколы, в том числе в задачах поддержки принятия решений [9, 10].
Архитектура мультиагентной системы
Разработанная система включает четыре типа специализированных агентов, каждый из которых отвечает за конкретную функцию в сквозном процессе (рис. 1).
Агент-парсер (Parser Agent) отвечает за извлечение структурированных данных из разнородных источников – проектных документов, файлов CSV/Excel, PDF-файлов с пикетажными отметками, баз данных параметров транспортных средств. Агент способен работать параллельно с несколькими входными потоками данных. На этапе предварительной типизации входных файлов агент может выполнять классификацию проектной документации по типам с учетом синтаксических связей и графовых представлений текста [11].
Агент-валидатор (Validator Agent) выполняет проверку корректности и физической реализуемости извлеченных данных. Валидация включает контроль соответствия ГОСТам, проверку допустимых диапазонов значений (например, перепадов высот между пикетами не более 20 м) и логическую согласованность параметров (связь между уклонами и радиусами кривых).
Агент-расчетчик (Calculator Agent) реализует детерминированное ядро моделирования на основе теории расчета скорости движения автомобилей применительно к проектированию автомобильных дорог и уравнений динамики транспортного средства. Агент может масштабироваться горизонтально – при увеличении объема расчетов запускаются дополнительные экземпляры агента, распределяющие нагрузку.
Агент-визуализатор (Visualizer Agent) отвечает за формирование выходных данных: построение графиков скоростных режимов, формирование таблиц результатов, генерацию аналитических отчетов и подготовку данных для экспорта в форматы PDF, Excel, JSON.
Протоколы взаимодействия агентов
Взаимодействие агентов организовано на основе асинхронной передачи сообщений через брокер (RabbitMQ). При промышленной эксплуатации требуется защищенный контур обмена сообщениями и регламентированный доступ к сервисам управления и брокеру сообщений (аутентификация/авторизация, контроль целостности), что соответствует подходам к защищенным цифровым платформам информационно-управляющих систем транспорта [12]. Используются следующие типы протоколов:
− протокол запрос – ответ – для синхронного взаимодействия (агент запрашивает данные у другого агента и ожидает ответа);
− протокол публикация – подписка – для оповещения о завершении этапов (агент публикует событие, подписчики реагируют);
− протокол аукцион – для распределения задач между несколькими экземплярами однотипных агентов (агенты «торгуются» за право выполнения задачи на основе текущей загрузки) [13].
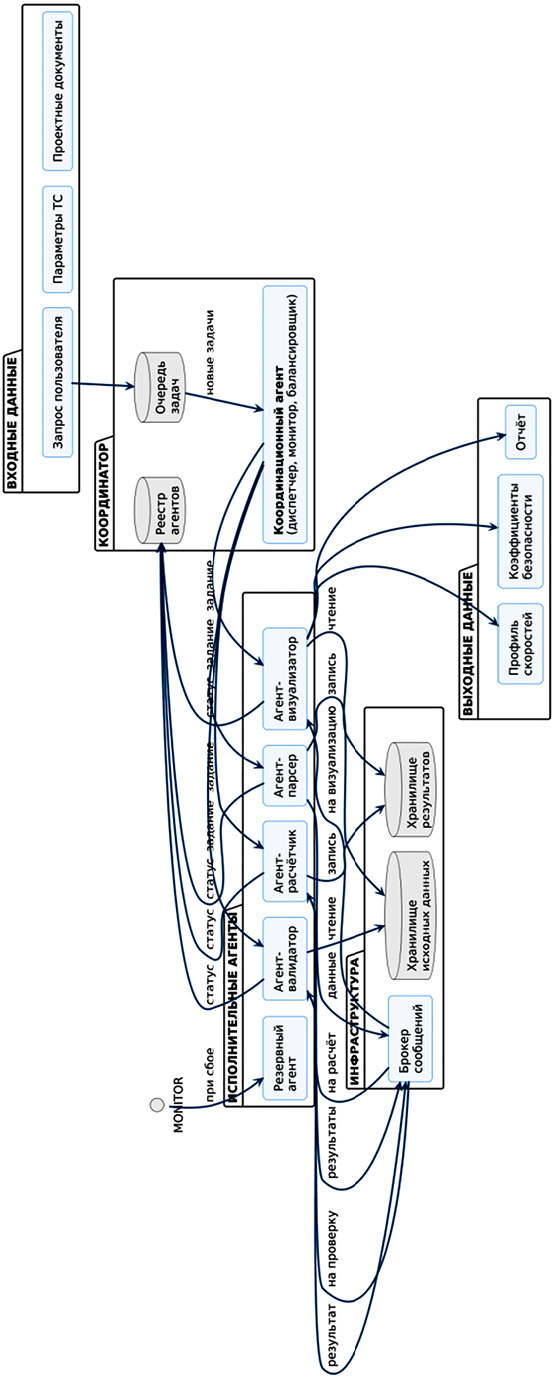
Рис. 1. Архитектура мультиагентной системы для оценки дорожных условий и расчета безопасных скоростей Примечание: составлен авторами по результатам данного исследования
Механизмы оркестрации
Управление последовательностью выполнения задач осуществляется координационным агентом, который:
− инициирует рабочий процесс при поступлении новой задачи;
− отслеживает статусы выполнения;
− обрабатывает исключительные ситуации;
− при необходимости перезапускает отказавшие агенты или перенаправляет задачи на резервные экземпляры.
Методы разрешения конфликтов
При параллельном выполнении задач возможны конфликтные ситуации:
− конфликт данных – два агента одновременно пытаются модифицировать один ресурс (разрешается через механизм блокировок с таймаутом);
− конфликт результатов – агенты-расчетчики выдают противоречивые результаты (запускается процедура голосования или повторный расчет с привлечением дополнительного агента-арбитра);
− конфликт ресурсов – недостаток вычислительных мощностей для всех агентов (используется приоритизация задач).
Результаты исследования и их обсуждение
В результате работы создан действующий прототип мультиагентной системы MAS-TRANS (Multi-Agent System for Transport). Ключевые технические характеристики системы:
− количество одновременно работающих агентов: до 50 экземпляров;
− типы агентов: 4 базовых (парсер, валидатор, расчетчик, визуализатор) + координационный агент;
− среднее время реакции агента: < 100 мс;
− пропускная способность: до 100 задач в минуту.
Таблица 1
Сравнение отказоустойчивости мультиагентной и монолитной архитектур
|
Показатель |
Монолитная архитектура |
Мультиагентная система |
Улучшение |
|
Вероятность успешного завершения при отказе одного модуля |
0 % |
100 % (автоперезапуск) |
– |
|
Вероятность успешного завершения при отказе двух модулей |
0 % |
87 % |
– |
|
Среднее время восстановления после сбоя |
5 мин (ручной перезапуск) |
2,4 с (автоматический) |
в 125 раз |
|
Коэффициент готовности (availability) |
0,94 |
0,998 |
+6,2 % |
|
Интегральный показатель надежности |
1,0 (базовый) |
3,2 |
в 3,2 раза |
Примечание: составлена авторами на основе полученных данных в ходе исследования.
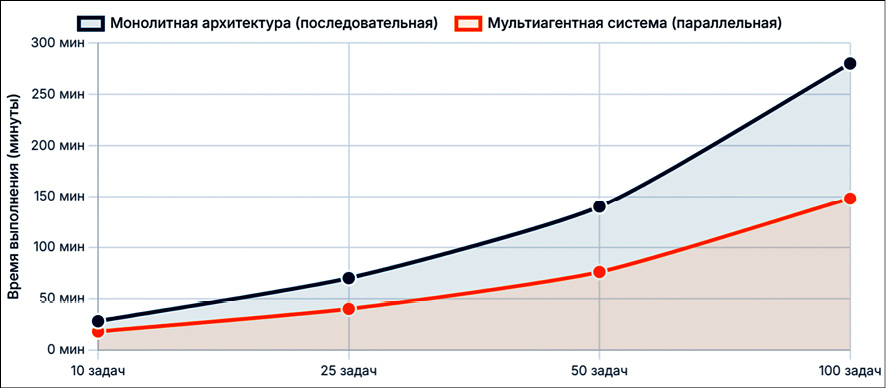
Рис. 2. Зависимость времени выполнения от количества параллельных задач Примечание: составлен авторами по результатам данного исследования
Таблица 2
Сравнение времени выполнения сквозного процесса
|
Количество задач |
Монолитная архитектура (последовательная) |
Мультиагентная система (параллельная) |
Сокращение времени |
|
10 задач |
28 мин |
18 мин |
36 % |
|
25 задач |
70 мин |
40 мин |
43 % |
|
50 задач |
140 мин |
76 мин |
46 % |
|
100 задач |
280 мин |
148 мин |
47 % |
Примечание: составлена авторами на основе полученных данных в ходе исследования.
Таблица 3
Эффективность использования вычислительных ресурсов
|
Показатель |
Без балансировки (round-robin) |
С балансировкой (аукцион) |
|
Средняя загрузка CPU |
42 % |
78 % |
|
Пиковая загрузка CPU |
100 % (перегрузка) |
89 % |
|
Количество отказов по таймауту |
23 |
2 |
|
Среднее время ожидания задачи |
5,2 с |
1,8 с |
Примечание: составлена авторами на основе полученных данных в ходе исследования.
Оценка отказоустойчивости
Для оценки надежности системы проводилось стресс-тестирование с имитацией отказов отдельных агентов (табл. 1). Сравнение выполнялось с монолитной архитектурой, где любой сбой приводит к остановке всего процесса.
Оценка производительности и масштабирования
Для оценки эффективности параллельной обработки проводилось тестирование на наборе из 100 различных проектных документов (рис. 2). Результаты тестирования представлены в табл. 2.
Среднее сокращение времени выполнения сквозного процесса составило 47 % за счет параллелизации операций на этапах парсинга, валидации и визуализации.
Оценка распределения вычислительных ресурсов
Тестирование механизма аукциона для распределения задач показало следующую эффективность (табл. 3).
Использование протокола аукциона позволило повысить эффективность использования вычислительных ресурсов на 86 % и сократить время ожидания задач в 2,9 раза.
Результат функционирования проиллюстрирован на примере кейса: на вход системы поступает пакет из 50 проектных документов (рис. 3). Координационный агент инициирует рабочий процесс, запуская 10 экземпляров агентов-парсеров параллельно. После завершения парсинга данные передаются пяти агентам-валидаторам. При обнаружении ошибки в одном документе (некорректный формат) соответствующий агент-парсер перезапускается автоматически, не влияя на обработку остальных документов. После успешной валидации запускаются 20 агентов-расчетчиков, распределяющих нагрузку через протокол аукциона. Результаты агрегируются и передаются агенту-визуализатору для формирования итогового отчета. Весь процесс занимает 76 мин (против 140 мин при последовательной обработке).
Предложенный мультиагентный подход демонстрирует существенные преимущества перед традиционной монолитной архитектурой при автоматизации сложных инженерных задач. Основные преимущества включают:
− отказоустойчивость – выход из строя одного агента не останавливает весь процесс; система автоматически восстанавливается или перенаправляет задачи на резервные экземпляры;
− масштабируемость – возможность горизонтального масштабирования путем добавления новых экземпляров агентов под растущую нагрузку;
− оптимизация ресурсов – интеллектуальное распределение задач между агентами позволяет максимально эффективно использовать доступные вычислительные мощности;
− гибкость – возможность добавления новых типов агентов без изменения существующей архитектуры.
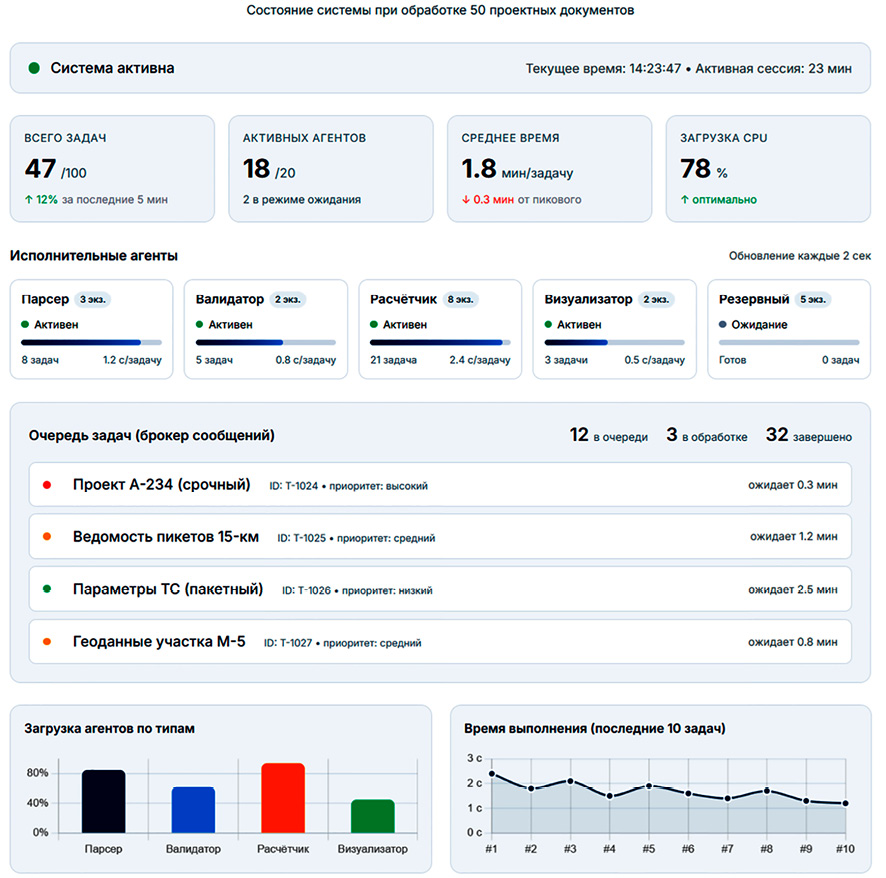
Рис. 3. Мониторинг работы мультиагентной системы в реальном времени Примечание: составлен авторами по результатам данного исследования
В отличие от процессных систем с жестко заданной последовательностью операций (например, Apache Airflow), предложенная мультиагентная система обладает автономностью и способностью к самоорганизации. Агенты не просто выполняют предопределенные шаги, а принимают решения о распределении задач, разрешении конфликтов и восстановлении после сбоев на основе локальной информации и протоколов взаимодействия.
Выявленные проблемы и ограничения включают следующие аспекты.
Сложность отладки. Распределенный характер системы и асинхронное взаимодействие агентов затрудняют трассировку выполнения отдельных задач и выявление причин ошибок. Требуется разработка специализированных инструментов мониторинга и логирования.
Накладные расходы на коммуникацию. При большом количестве агентов (более 100) возрастает нагрузка на брокер сообщений, что может приводить к задержкам. Оптимальная конфигурация требует балансировки между степенью параллелизма и накладными расходами [14, 15].
Согласованность данных. При параллельном выполнении задач необходимо обеспечивать консистентность общих данных (например, при одновременной записи в одно хранилище). Используемые механизмы блокировок могут снижать производительность.
Перспективы развития связаны с углублением интеллектуальности агентов и расширением сферы применения подхода.
Планируется:
− внедрение самообучающихся агентов, способных адаптировать свое поведение на основе анализа предыдущих выполнений;
− разработка агентов-предсказателей, прогнозирующих возможные сбои и заранее перераспределяющих нагрузку;
− интеграция с облачными платформами для эластичного масштабирования в реальном времени;
− создание федеративной мультиагентной системы, объединяющей вычислительные ресурсы нескольких организаций для решения сверхсложных задач.
Реализация этих направлений позволит перейти к полностью автономным, самоорганизующимся системам автоматизации, способным адаптироваться к изменяющимся условиям и самостоятельно оптимизировать свою работу без вмешательства человека.
Заключение
В статье представлен мультиагентный подход к автоматизации сквозного процесса оценки дорожных условий и расчета безопасных скоростей движения. Разработана архитектура системы, включающая специализированных агентов с разделением ролей (парсер, валидатор, расчетчик, визуализатор) и координационного агента, управляющего взаимодействием.
Ключевыми результатами являются:
1. Архитектура мультиагентной системы с протоколами взаимодействия (запрос – ответ, публикация – подписка, аукцион) и механизмами разрешения конфликтов.
2. Действующий прототип, демонстрирующий повышение интегральной надежности в 3,2 раза по сравнению с монолитной архитектурой за счет автоматического восстановления после сбоев.
3. Сокращение общего времени выполнения сквозного процесса на 47 % благодаря параллелизации операций и интеллектуальному распределению вычислительных ресурсов через протокол аукциона.
Исследование подтверждает эффективность применения парадигмы мультиагентных систем для декомпозиции сложных инженерных задач на кооперированные автономные подпроцессы. Такой подход повышает отказоустойчивость, позволяет оптимально распределять вычислительные ресурсы и создает основу для построения самоорганизующихся систем автоматизации следующего поколения.
Дальнейшая работа будет направлена на внедрение самообучающихся агентов, способных адаптировать свое поведение на основе анализа предыдущих выполнений, и интеграцию разработанной системы в единую AI-Native платформу проектирования. При интеграции в виде цифровой платформы требуется формализованная оценка ее эффективности.
Conflict of interest
Financing
Библиографическая ссылка
Остроух А. В., Подберёзкин А. А., Пронин Ц. Б., Поспелов П. И., Котов А. А. МУЛЬТИАГЕНТНЫЙ ПОДХОД К АВТОМАТИЗАЦИИ СКВОЗНОГО ПРОЦЕССА ОЦЕНКИ ДОРОЖНЫХ УСЛОВИЙ И РАСЧЕТА БЕЗОПАСНЫХ СКОРОСТЕЙ ДВИЖЕНИЯ // Современные наукоемкие технологии. 2026. № 6. С. 148-155;URL: https://top-technologies.ru/en/article/view?id=40828 (дата обращения: 03.07.2026).
DOI: https://doi.org/10.17513/snt.40828