


Scientific journal
Modern high technologies
ISSN 1812-7320
"Перечень" ВАК
ИФ РИНЦ = 1,279
SIMULATION OF PEDESTRIAN EVACUATION USING ARTIFICIAL INTELLIGENCE

Введение
Обеспечение безопасной и эффективной эвакуации людей из зданий и сооружений при возникновении чрезвычайных ситуаций остается одной из наиболее актуальных задач в области гражданской обороны, пожарной безопасности и организации массовых мероприятий [1]. Несмотря на значительный прогресс в строительных технологиях и нормировании, трагические инциденты, связанные с давкой и неорганизованным движением людей при эвакуации, продолжают происходить по всему миру. Это свидетельствует о недостаточности традиционных, зачастую статических, подходов к планированию эвакуационных путей и управлению потоками, которые не учитывают динамическую природу поведения людей в стрессовых условиях.
Математическое моделирование потоков людей имеет уже полувековую историю. Существует большое количество математических моделей пешеходных потоков, отличающихся как по степени детализации параметров, так и по целям их использования. По степени детализации их разделяют на макроскопические, мезоскопические и микроскопические, что спроецировано в большей степени с имеющей более длительную историю теорией транспортных потоков [2, с. 16–28].
Микроскопические модели, используя высокую степень детализации, различают отдельных людей и их взаимодействие. Микроскопические модели, такие как широко известная модель социальных сил (Social Force Model), клеточные автоматы (CA) или агентные модели (Agent-Based Models), описывают траектории каждого человека, однако их вычислительная сложность и трудность калибровки параметров для больших скоплений людей ограничивают их применение для оперативного управления в реальном времени [3]. Макроскопические модели, с другой стороны, моделируют пешеходный поток в целом и могут использоваться в ситуациях, когда взаимодействие людей не изучается подробно [4]. Мезоскопические (или гибридные) модели пытаются совместить преимущества обоих подходов, рассматривая группы пешеходов как отдельные сущности. Стохастические модели массового обслуживания (СМО) используются для моделирования очередей на выходах и турникетах [5]. Мезоскопическое моделирование обычно заключается в упрощении динамики с меньшими требованиями к данным. Оно сочетает микроскопические аспекты (может работать с отдельными пешеходами) и макроскопические аспекты, такие как динамика потока. К мезоскопическим относят, например, модели на основе теории массового обслуживания. В работах И. А. Корелина с помощью нестационарных систем массового обслуживания описывается движение потока людей через контрольно-пропускные пункты.
Значительный вклад в исследование и математическое моделирование движения людских потоков во время эвакуации внес российский ученый В. В. Холщевников и его ученики. Они связали аналитически плотность и скорость для пешеходных потоков в различных условиях аналогично зависимости для транспортных потоков [6]. Работы по выявлению таких зависимостей были продолжены учеником Холщевникова Д. А. Самошиным для неоднородных потоков и потоков, образованных людьми со сниженной мобильностью [7].
Прорыв в данной области связан с интеграцией технологий искусственного интеллекта (ИИ) и систем компьютерного зрения, которые позволяют перейти от гипотетического моделирования к управлению на основе данных, получаемых в реальном времени. Развитие технологий, привлечение к обработке данных искусственного интеллекта делает возможным разработку более сложных моделей, учитывающих большее количество данных и факторов. Так, например, математическое моделирование движения людей в процессе эвакуации на основании непрерывно-дискретного подхода и компьютерная реализация указанного подхода рассматриваются в работах Е. С. Кирик.
Алгоритмы машинного обучения способны автоматически анализировать видеопоток, детектировать и отслеживать людей, выявлять группы на основе их пространственного расположения и взаимодействия, а также оценивать ключевые параметры потока: плотность, скорость и распределение по направлениям. Это открывает возможности для создания принципиально новых адаптивных систем, способных динамически перестраивать сценарии эвакуации и выдавать персоналу и посетителям актуальные рекомендации, что позволяет преодолеть разрыв между детальным микроскопическим моделированием и требованиями к скорости вычислений для работы в режиме реального времени.
Ключевым недостатком большинства существующих решений является их статичность и зависимость от априорных данных. Они плохо адаптируются к быстро меняющейся обстановке, не учитывают реального состава толпы (наличие детей, пожилых людей, лиц с ограниченными возможностями) и сложных поведенческих паттернов, возникающих в условиях неопределенности и стресса. В результате прогнозы, выполненные по таким моделям, могут существенно расходиться с реальностью, что снижает их практическую ценность для систем поддержки принятия решений.
Цель исследования – разработка математической модели эвакуации пешеходных потоков, позволяющей управлять процессом эвакуации в режиме реального времени с применением технологий искусственного интеллекта.
Для достижения поставленной цели требуется решить следующие задачи: определить входные параметры модели, методы сбора и обработки данных с видеодетекторов в реальном времени; разработать метод формирования матрицы корреспонденций для пешеходных потоков; разработать методы определения метрик качества организации эвакуации.
Материалы и методы исследования
Использование современных технологий искусственного интеллекта позволяет получить модель, которая сочетает в себе точность математического моделирования, гибкость ИИ-алгоритмов и практическую направленность на решение задач управления пешеходными потоками в режиме реального времени, что делает ее перспективным инструментом для обеспечения безопасности на массовых мероприятиях и в критических ситуациях.
Исходными параметрами для прогнозирования характеристик качества организации процесса эвакуации из мест проведения массовых мероприятий являются данные об активности пешеходов, полученные с камер видеонаблюдения. Для сбора и предварительной обработки данных видеопотока со стационарных камер наблюдения с целью детекции объектов интереса могут использоваться сверточные нейронные сети (CNN). К примеру, модели, основанные на YOLO архитектуре, способны детектировать, классифицировать, отслеживать и реидентифицировать объекты интереса.
Для прогнозирования скоплений людей могут использоваться рекуррентные нейронные сети (RNN) и их улучшенные версии – LSTM и GRU, особенно при наличии временной составляющей в данных. В задачах пространственно-временного анализа подойдут графовые нейросети (Graph Neural Networks, GNN), а также модели типа Spatio-Temporal Graph Convolutional Networks (ST-GCN). С их помощью можно выявлять устойчивые шаблоны движения, предсказывать увеличение плотности в определенных зонах и формировать кластеры с учетом пространственной структуры зоны проведения массового мероприятия.
Для моделирования движения пешеходов во время эвакуации из мест проведения массовых мероприятий предлагается использовать мезоскопическую детализацию, опирающуюся на теорию случайных процессов и, в частности, теорию массового обслуживания.
В данной работе предлагается следующий подход к разработке комплексной математической модели для моделирования эвакуации пешеходных потоков, основанной на поэтапном применении технологий искусственного интеллекта:
− использование сквозного конвейера обработки данных: от сбора видеоинформации с помощью детекторов до определения показателей качества организации движения людских потоков;
− применение алгоритмов кластеризации для автоматического выделения групп пешеходов на основе их пространственно-поведенческих характеристик с учетом состава группы [8];
− формирование и непрерывная актуализация в реальном времени динамической матрицы корреспонденций «локация – выход» с использованием вероятностного подхода, максимизирующего энтропию системы;
− использование стохастической модели массового обслуживания с эрланговским входным потоком [9, с. 92–110] для прогнозирования ключевых показателей эффективности (длины очереди, времени ожидания, загрузки выходов) [10, с. 10–12], что позволяет более адекватно описывать плотные пешеходные потоки.
Благодаря данным видеонаблюдения оказывается возможным периодическое обновление матрицы корреспонденций и прогнозирование характеристик потоков людей у выходов из зоны проведения мероприятия.
Предлагаемый подход к моделированию предоставляет методический фундамент для создания интеллектуальных систем управления безопасностью на объектах с массовым пребыванием людей, способных повысить надежность и скорость эвакуации за счет адаптивного и обоснованного распределения людских потоков. Он позволит обеспечить переход от статических расчетов к адаптивным системам управления в реальном времени.
Результаты исследования и их обсуждение
Общие характеристики математической модели движения пешеходных потоков при эвакуации. Научная новизна исследования состоит в разработке мезоскопической математической модели формирования пешеходных потоков, отличающейся от существующих тем, что она основана на аналитических расчетах по актуализируемым в реальном времени данным и позволяет прогнозировать загруженность выходов при эвакуации с краткосрочной задержкой реагирования. Своевременная информация о степени загруженности эвакуационных выходов позволит системе регулировать плотность и направление потоков.
Математическая модель состоит из следующих блоков:
1) сбор и обработка статистических данных о пешеходном потоке в режиме реального времени (выбранные характеристики обрабатываются с применением ИИ по данным, полученным с видеодетекторов);
2) кластеризация пешеходов согласно выбранным характеристикам пешеходов и выбранной метрике;
3) формирование матрицы корреспонденций «локация кластера – выход»;
4) прогнозирование характеристик, требующихся для определения метрик стохастической модели;
5) определение метрик стохастической модели: длина очереди, время ожидания в очереди.
Ниже подробно обсуждается каждый из блоков.
1. Сбор и обработка статистических данных о пешеходном потоке
Сбор и обработка видеоданных проводится в реальном времени с помощью систем компьютерного зрения [3]. Современные подходы активно интегрируют методы ИИ для анализа видеоданных, кластеризации и прогнозирования. Например, применение сверточных нейронных сетей (CNN) для детектирования пешеходов.
Для данной площадки (или помещения) вводится система декартовых координат OXY на плоскости. С помощью компьютерного зрения определяются количество людей в данной локации, координаты (xi;yi) индивидуумов во введенной системе координат, скорость и плотность потока у выходов из локаций, фиксируются признаки социального взаимодействия (например, повороты головы, тактильные контакты).
2. Кластеризация пешеходов согласно выбранным характеристикам пешеходов и выбранной метрике
Поведение пешеходов в группах (кластерах) отличается от поведения индивидуального пешехода. Как правило, все члены группы передвигаются с одинаковой скоростью к одному выходу. Кластеризация проводится на основании коммуникаций и расстояний между клетками. То есть в функции расстояний используется частота коммуникаций между «клетками».
Каждому кластеру присваивается тип, учитывающий состав кластера, влияющий на скорость передвижения:
1) А – в составе мужчины;
2) В – в составе женщины;
3) С – смешанный состав;
4) D – в составе есть ребенок;
5) E – в составе есть инвалид.
В зависимости от типа кластера прогнозируется впоследствии скорость передвижения [8; 11], а также рекомендации по управлению потоками при эвакуации. Цель – автоматически выделить группы (кластеры) людей на основе их пространственной близости и поведения в реальном времени для оптимизации управления эвакуацией.
Входные данные: координаты людей (xi;yi) в системе координат помещения; опционально определяются векторы скорости, направления движения, признаки социального взаимодействия (например, частота поворотов головы).
Параметры DBSCAN:
− ε – максимальное расстояние между двумя людьми для включения в один кластер;
− minPts – минимальное количество людей, образующих плотную группу.
Алгоритм кластеризации:
1. Предобработка данных: нормализация координат и признаков (при необходимости).
2. Формирование матрицы расстояний между людьми (евклидово расстояние в метрах).
3. Инициализация: все люди помечаются как непосещенные. Создается пустой список кластеров.
4. Основной цикл: для каждой точки Pi определяются соседи в радиусе ε от Pi; определяется шум (возможно, одиночный человек или артефакт); создается и обновляется кластер C.
Для основного цикла используется функция ExpandCluster (Pi, N, C, ε, minPts).
5. Постобработка: удаление кластеров с числом людей меньше пороговых значений; расчет характеристики кластеров (центроид, размер, скорость и направление движения), визуализация кластеров на плане помещения.
6. Выходные данные: список кластеров с их характеристиками; помеченные точки шума (одиночные люди); матрица принадлежности людей к кластерам.
В качестве параметров можно взять, например, ε = 1,5 м (максимальное расстояние для учета в одной группе), minPts = 2 (минимум 2 чел. для образования кластера), а также при наличии данных о скорости можно добавить весовую метрику расстояния с учетом движения.
3. Формирование матрицы корреспонденций «локация кластера – выход»
Исходными данными для формирования матрицы корреспонденций являются следующие:
m – количество выходов с площадки проведения мероприятия;
n – количество зон, на которые разбита площадка проведения мероприятия;
si, i ∊ S – априорное (предполагаемое) общее количество пешеходов, выходящих из локации № i в течение всего периода;
dj, j ∊ D – предполагаемое (априорное) общее количество пешеходов, подходящих к выходу № j течение всего периода;
N – общее число посетителей.
Предполагается, что пешеходы, отнесенные к одному кластеру, направляются к одному и тому же выходу. Кроме того, должны выполняться следующие условия, которые называют условиями баланса системы:
 ,
,  ,
,  .
.
Введем также следующие обозначения:
ρij – количество пешеходов (назовем их «корреспонденциями»), выходящими из локации № i к выходу № j течение всего периода.
По априорным исходным данным составим опорную матрицу корреспонденций
 ,
,
которую впоследствии будем корректировать для текущего момента, то есть строить матрицу ODMatPed(t), используя обработку данных видео-мониторинга, полученную с помощью технологий ИИ.
Будем использовать вероятностный подход [12, с. 24–46], называемый методом максимизации энтропии. Теоретически пешеходы из каждой локации (их количество равно n) могут покинуть площадку проведения мероприятия через любой из m выходов. Будем считать, что на их выбор (предпочтение) влияют следующие факторы:
1) F1 – расстояние до выхода;
2) F2 – загруженность выхода;
3) F3 – загруженность прохода к данному выходу.
Количественно предпочтения пешеходов отражаются на вероятности Pij выбора пешеходами из локации № i выхода № j:
 ,
,
где коэффициенты предпочтений такие, что
(можно взять  );
);
Distj – расстояние от локации № i до выхода № j,  ;
;
Quej – количество людей в зоне ожидания у выхода № j,  ;
;
Densj – плотность потока на проходе к выходу № j,  .
.
Если обозначить через P_ODMl вероятность одной из реализаций выбора пар «локация – выход» и считать, что вероятности Pij не зависят друг от друга, то получим следующее равенство:
 .
.
Отметим, что предположение о независимости вероятностей Pij дает возможность значительно упростить аналитические выкладки при построении модели. На самом деле значения вероятностей зависят от факторов F2 и F3, которые динамически изменяются в процессе эвакуации. Однако эта проблема решается за счет организации обратной связи с видеодетекторами.
Используя законы комбинаторики, количество всевозможных реализаций выбора пар «локация – выход» равно количеству перестановок с повторениями:
 .
.
Значит, целевая функция для выбора наиболее вероятного состояния системы имеет вид
 →max.
→max.
При ограничениях:
и .
Удобнее исследовать функцию, полученную логарифмированием функции PODM(ρij):
 (1)
(1)
Так как в нашем случае N – const, то получаем следующую задачу:
При ограничениях:
и . (2)
Переменными задачи являются корреспонденции ρij при определенных для текущего момента вероятностях Pij, значениях si и dj, а также общем объеме N числа всех корреспонденций на текущий момент. Переменные задачи ρij – целочисленные, а значит, при малых значениях N решение возможно получить обычным перебором всех вариантов.
При больших значениях числа корреспонденций ρij можно применить к (1) формулу Стирлинга:
 .
.
В этом случае целевая функция примет более простой вид:
 (3)
(3)
Будем считать, что переменные ρij уже не целочисленные, а могут принимать положительные действительные значения. Стационарная точка целевой функции (3) имеет координаты  , что не удовлетворяет ограничениям (2). Значит, решение задачи достигается на границе области. В этом случае удобнее поступить следующим образом,
, что не удовлетворяет ограничениям (2). Значит, решение задачи достигается на границе области. В этом случае удобнее поступить следующим образом,
Для нахождения условного экстремума функции (3) при ограничениях (2) составим функцию Лагранжа и будем считать, что переменные ρij могут принимать положительные действительные значения:
 (4)
(4)
Точка экстремума функции (4) должна удовлетворять следующей системе уравнений:
для 
,
Выражение ρij через множители Лагранжа:
 . (5)
. (5)
После подстановки (5) в равенства (2) получим систему уравнений относительно λi и μj:
 ,
,
 .
.

Систему (m+n) нелинейных уравнений можно решить любыми численными методами, например методом последовательных приближений [13, с. 172–211]. В результате после подстановки в формулу (5) и округления до ближайшего целого числа получим распределение корреспонденций и матрицу ODMatPed0.
Если ввести обозначения
 ,
,  ,
,
то можно выразить новые переменные следующим образом:
 ,
,
 .
.
В этом случае значения корреспонденций будут иметь вид
 .
.
В таком же виде получается решение двусторонней модели гравитационного типа в транспортном моделировании [14]. Численные значения калибровочных коэффициентов ai и bj находят обычно методом балансировки Фернесса, который быстро сходится к решению системы.
Впоследствии матрица корреспонденций обновляется в режиме реального времени по данным с видеодетектора через заданные малые промежутки времени. Обновлению подлежат следующие входные параметры:
si;  ; Quej; Que; Densj, Dens, Pij.
; Quej; Que; Densj, Dens, Pij.
Кроме того рассчитываются новые значения dj:  .
.
Также для обновления матрицы корреспонденций можно применять экстраполяционные методы, например метод Фратара.
4. Прогнозирование характеристик, требующихся для определения метрик модели
Матрица корреспонденций содержит информацию о количестве пешеходов, которые должны пройти от данной локации к определенному выходу, что позволяет делать прогноз интенсивности пешеходного потока к конкретному выходу через заданный промежуток времени.
Общее количество пешеходов, которые предполагают направиться к выходу № j, равно .
Введем обозначения:
Sij – расстояние от локации № i до выхода № j (в метрах);
vij – скорость передвижения (в м/с);
Tij = Sij / vij – среднее время движения от локации № i до выхода № j.
Скорость передвижения vij может быть спрогнозирована по данным о составе пешеходного потока, то есть по преобладающему типу кластеров в потоке. Исследования о зависимости скорости и плотности людского потока от его состава представлены в работах [6; 7], разработаны соответствующие методики и таблицы. В среднем скорость свободного движения пешеходов в потоке принимают равной vij = 1,66 м/с. В предлагаемой модели значение скорости можно получить по данным видеодетектора.
Если по данным мониторинга определена плотность Di на выходе из локации № i, то можно оценить плотность потока (чел/м2), образованного пешеходами, направляющимися от локации № i к выходу № j следующим образом:
 .
.
Можно считать, что приближенное значение ожидаемой через время
плотности потока (чел /м2), образованного пешеходами у выхода № j следующее:
 .
.
Зависимость между интенсивностью, скоростью и плотностью потока:
 (чел/c).
(чел/c).
Значение параметра k рассчитываем по статистическим данным [15; 16], полученным с помощью видеодетекторов на подходах к каждому выходу. Тогда второй параметр Эрланга для применения модели СМО равен
 ,.
,.
Параметры распределения Эрланга λ и k используются для прогнозирования характеристик очереди у выходов с площадки мероприятия [15].
5. Определение метрик стохастической модели
При прохождении турникетов для выхода из зоны проведения мероприятия авторами предлагается использовать модель системы массового обслуживания с переменной плотностью, считая поток посетителей распределенным по закону Эрланга [15]. Выбор обусловлен тем, что этот закон позволяет аппроксимировать потоки различной плотности. При значении параметра k = 6 закон Эрланга уже близок к нормальному закону распределения. А по данным различных исследований, нормальный закон распределения хорошо аппроксимирует плотные потоки, каковыми являются потоки людей на выходе при прохождении турникетов [16]. При имеющейся зоне ожидания возможно обеспечить работу СМО на предельно допустимой интенсивности входящего потока, формируя ординарный поток из зоны ожидания в зону работы СМО.
Если турникетов нет, то при расчетах предлагается считать СМО многоканальной, где число каналов равно
 ,
,
где w_door – ширина прохода,
w_cell – средняя ширина полосы, необходимой для прохождения одного пешехода.
Итак, распределение интервалов по времени между подряд идущими пешеходами подчинено закону Эрланга порядка k. Значение параметра λ = λ(t) зависит от времени и периодически обновляется согласно описанной выше модели. Обслуживание заявок (проход через турникет одного посетителя) распределено по показательному закону с параметром μ. Имеется M турникетов (обслуживающих приборов). Мест в очереди – ограниченное числом посетителей мероприятия количество, которое будем обозначать NQ.
Для определения неизвестных вероятностей необходимо решить систему дифференциальных уравнений, например, численным методом Рунге – Кутты четвертого порядка:
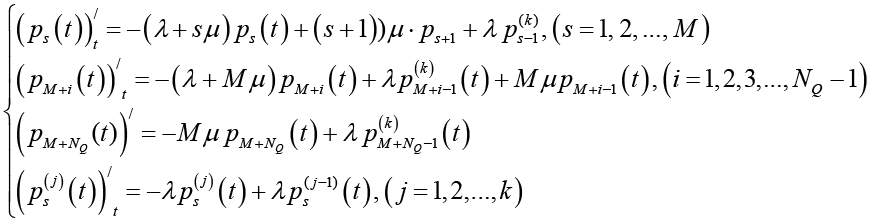 .
.
При моделировании нестационарного потока посетителей в случае, когда интенсивность потока меняется с течением времени, поток представлен в виде кусочно-непрерывной функции. Для этого вся временная ось разбивается на K интервалов [ti–1; ti]. На каждом таком интервале интенсивность поступления заявок считается постоянной. Для стационарных значений параметров Эрланга на i-м интервале приняты обозначения λi и ki.
Начальные условия для системы дифференциальных уравнений имеют вид
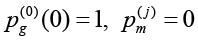 (6)
(6)
(m = 0, 1, 2, .., g-1, g+1, , …; j = 1,…, ki ).
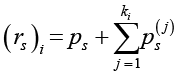
Номер g вероятности  , отличной от нуля в начале нового временного интервала [ti–1; ti], определяется из условия g = [M(X(t))] – целая часть от математического ожидания числа заявок X(t) в системе на предыдущем временном интервале [ti–2; ti–1]. Основной результат решения системы – определение вероятности нахождения в СМО s заявок для каждого интервала [ti–1; ti]:
, отличной от нуля в начале нового временного интервала [ti–1; ti], определяется из условия g = [M(X(t))] – целая часть от математического ожидания числа заявок X(t) в системе на предыдущем временном интервале [ti–2; ti–1]. Основной результат решения системы – определение вероятности нахождения в СМО s заявок для каждого интервала [ti–1; ti]:
 .
.
При решении системы численным методом (rs)i – сеточные функции.
Можно записать зависимость параметров распределения от времени с помощью функции Хэвисайда:
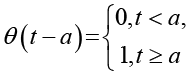 .
.
Таким образом, получаем
 ; (7)
; (7)
 ; (8)
; (8)
 . (9)
. (9)
Для вычисления характеристик качества функционирования СМО применяются формулы
 – зависимость длины очереди от времени;
– зависимость длины очереди от времени;
 зависимость ожидания в очереди от времени.
зависимость ожидания в очереди от времени.
В зависимости от значений характеристик Lq(t) и Wq(t) для каждого из выходов делается вывод о его степени загруженности и вырабатываются рекомендации о перераспределении потоков людей. Информация в режиме реального времени может выводиться на информационные табло.
6. Примеры расчетов с помощью разработанной модели
Пример 1. Рассмотрим пример расчета матрицы корреспонденций для двух локаций (зон) и двух выходов, что соответствует актовому залу КубГУ.
Результаты численного решения
|
t (мин) |
λ(t) |
P₀(t) |
P₁(t) |
P₂(t) |
P₃(t) |
L_q(t) |
W_q(t) |
|
0,0 |
0,3 |
1,00 |
0,00 |
0,00 |
0,00 |
0,00 |
0,00 |
|
0,5 |
0,3 |
0,86 |
0,12 |
0,01 |
0,00 |
0,02 |
0,02 |
|
1,0 |
0,3 |
0,78 |
0,18 |
0,03 |
0,01 |
0,06 |
0,07 |
|
1,5 |
0,3 |
0,73 |
0,20 |
0,05 |
0,01 |
0,09 |
0,10 |
|
2,0 |
0,3 |
0,71 |
0,21 |
0,06 |
0,02 |
0,11 |
0,12 |
|
2,5 |
0,8 |
0,55 |
0,28 |
0,11 |
0,06 |
0,23 |
0,29 |
|
3,0 |
0,8 |
0,44 |
0,29 |
0,16 |
0,11 |
0,37 |
0,47 |
|
3,5 |
0,8 |
0,38 |
0,29 |
0,19 |
0,15 |
0,49 |
0,61 |
|
4,0 |
0,8 |
0,36 |
0,28 |
0,19 |
0,17 |
0,54 |
0,67 |
|
4,5 |
0,8 |
0,36 |
0,27 |
0,19 |
0,18 |
0,55 |
0,69 |
|
5,0 |
0,8 |
0,36 |
0,29 |
0,22 |
0,13 |
0,48 |
0,60 |
Примечание: составлена авторами на основе полученных данных в ходе исследования.
Входные параметры:
s1 = 30 – количество пешеходов в локации 1;
s2 = 50 – количество пешеходов в локации 2;
d1 = 40 – количество пешеходов, направляющихся к выходу 1;
d2 = 40 – количество пешеходов в локации, направляющихся к выходу 2;
 – общее количество людей в помещении.
– общее количество людей в помещении.
Коэффициенты предпочтения для каждой пары (вероятности выбора пары «локация – выход»):
P11 = 0,35 – вероятность выбора выхода 1 из локации 1;
P12 = 0,15 – вероятность выбора выхода 2 из локации 1;
P21 = 0,2 – вероятность выбора выхода 1 из локации 2;
P22 = 0,3 – вероятность выбора выхода 2 из локации 2;
 .
.
Получаем следующую систему для определения корреспонденций:
 .
.
Система содержит четыре неизвестных λ1, λ2, μ1, μ2,. Неизвестные корреспонденции определяются после нахождения значений неизвестных по следующей формуле:
.
Начальные значения:

Проверим баланс по выходам:

Для решения применим метод балансировки Фернесса. Получены следующие значения, для которых уже выполняются условия баланса:

Округленное до целых значений решение следующее:

Таким образом, матрица корреспонденций имеет вид
 .
.
Пример 2. Рассмотрим пример, иллюстрирующий определение вероятностей состояний системы массового обслуживания  :
:
M = 1 (один канал);
N_q = 2 (макс. 2 в очереди);
s = 0, 1, 2, 3 – виды состояний СМО по числу заявок;
k = 6 (фазы Эрланга).
Пусть μ = 1, λ(t) меняется ступенчато, то есть при 0 ≤ t < 2: λ = 0,3 (низкая нагрузка), при 2 ≤ t < 5: λ = 0,8, при t > 5: λ = 1,2 (высокая нагрузка). Начальные условия
 ,
,  .
.
Результаты численного решения задачи приведены в таблице.
Данные, полученные с помощью перечисленных программных решений, могут быть интегрированы в предлагаемую модель для обновления параметров в реальном времени, повышая точность прогнозов и адаптивность системы управления эвакуацией.
Заключение
Одной из ключевых особенностей разработанной математической модели является использование технологий искусственного интеллекта для обновления параметров, необходимых для аналитических расчетов характеристик качества организации движения пешеходов через эвакуационные выходы. Это выгодно отличает предлагаемую модель от статических аналогов, которые полагаются на априорные данные и не учитывают текущую ситуацию, а также составляет научную новизну модели.
Предложенный метод формирования матрицы корреспонденций позволяет в режиме реального времени определять параметры распределения Эрланга для прогнозирования характеристик очереди у выходов с площадки мероприятия. Разработанный метод учитывает нестационарность случайного потока, что увеличивает точность расчетов. Разработанная модель позволяет прогнозировать загруженность выходов с площадки проведения массового мероприятия и формулировать в динамическом режиме рекомендации по равномерному распределению нагрузки на выходы.
Перспективы дальнейших исследований видятся в верификации модели на полноценных натурных экспериментах, а также учете более сложных факторов (например, паники, архитектурных препятствий), а также в интеграции с системами «умного города» для создания комплексных решений по управлению городской мобильностью и безопасностью.
Conflict of interest
Financing
Библиографическая ссылка
Наумова Н. А., Чубырь Н. О. МОДЕЛИРОВАНИЕ ЭВАКУАЦИИ ПЕШЕХОДНЫХ ПОТОКОВ С ПРИМЕНЕНИЕМ ИСКУССТВЕННОГО ИНТЕЛЛЕКТА // Современные наукоемкие технологии. 2026. № 6. С. 132-141;URL: https://top-technologies.ru/en/article/view?id=40826 (дата обращения: 03.07.2026).
DOI: https://doi.org/10.17513/snt.40826