


Scientific journal
Modern high technologies
ISSN 1812-7320
"Перечень" ВАК
ИФ РИНЦ = 1,279
REGIME-ADAPTIVE DEAD-ZONE-BASED ARCHIVING OF VIBRATION-DIAGNOSTIC TELEMETRY WITH PRESERVATION OF TRANSIENT PROCESSES AND REDUCED DATA VOLUME

Введение
Вибродиагностика является одним из основных методов оценки технического состояния промышленного оборудования с механическими приводами, насосов, компрессоров, турбин, электродвигателей и металлорежущих станков. Вибродатчики на подшипниковых опорах регистрируют механические колебания, по изменениям которых выявляются признаки развивающихся неисправностей: нарушение балансировки, несоосность, дефекты подшипников и ослабление крепежных соединений [1].
В системах технического обслуживания первичный вибросигнал проходит фильтрацию и вычисление диагностических признаков. В системы диспетчерского управления и архивации поступают не исходные высокочастотные колебания, а агрегированные показатели. Прежде всего среднеквадратичные значения (далее – СКЗ) виброскорости. Они обновляются с частотой от единиц до сотен герц и образуют медленно изменяющиеся последовательности с длительными стационарными участками, сменяющимися переходными процессами. Переходные участки наиболее информативны, потому что по ним оцениваются скорость изменения вибрации и форма переходного процесса, что важно для диагностики и прогноза.
При обновлении показателя каждые 10 мс один канал формирует около 8,6 млн отсчетов в сутки; при тысячах каналов объем данных достигает терабайтов. При этом стационарные участки занимают до 90 % и более общей длительности и отражают преимущественно шум измерительного канала. Возникает противоречие. Запись всех отсчетов обеспечивает полноту, но создает высокую нагрузку на хранение. Широкий фиксированный порог сокращает объем архива, однако искажает переходные процессы и снижает ценность данных для прогностической аналитики.
Современные работы по предиктивному обслуживанию опираются на анализ временных рядов эксплуатационных параметров оборудования. M. A. B. Syed и соавт. систематизировали методы предварительной обработки, извлечения признаков, прогнозирования, обнаружения аномалий и оценки качества моделей [2]. Диагностический результат определяется не только выбранным алгоритмом, но и свойствами исходных данных, включая полноту, устойчивость к помехам и пригодность к последующему анализу.
При увеличении числа датчиков и частоты опроса существенным ограничением становится хранение телеметрии. G. Chiarot и C. Silvestri выполнили обзор методов сжатия временных рядов и предложили классификацию по принципам работы, типу ошибки и условиям применения [3].
J. D. A. Correa и соавт. рассмотрели сжатие данных датчиков интернета вещей с потерями и показали, что уменьшение объема передаваемых данных требует явного контроля ошибки восстановления [4]. Для систем вибродиагностики это критично, поскольку степень сжатия не является самостоятельным показателем качества архивирования при потере фрагментов, содержащих диагностическую информацию.
Адаптивные методы сжатия развиваются в направлении учета структуры сигнала при выборе параметров. A. El Sayed и соавт. предложили подход к адаптивному сжатию телеметрических временных рядов и обнаружению аномалий на основе автокодировщиков [5]. Q. Gong и соавт. рассматривают пространственно-временное адаптивное сжатие научных данных с сохранением значимых признаков [6]. В этих работах подчеркивается преимущество изменяемых параметров сжатия для сохранения информативных фрагментов.
Подобные решения, как правило, требуют обучаемых моделей, усложненной настройки и дополнительных вычислительных ресурсов, что ограничивает их использование в задачах промышленной архивации.
Для архивирования агрегированных диагностических показателей более применимы методы с интерпретируемыми параметрами. V. Agrawal, G. Kuldeep и D. Dey предложили почти без потерь методы сжатия временных рядов на основе статистических характеристик и отклонений [7]. По принципу действия данный класс подходов близок к архивированию по мертвой зоне, при котором малые отклонения подавляются, а запись выполняется при превышении порога относительно последнего сохраненного значения. Ограничение фиксированной мертвой зоны связано с единым значением порога для стационарных участков и переходных процессов. При малом пороге увеличивается число записей на стационаре за счет шумовой составляющей. При большом пороге ухудшается воспроизведение формы переходного процесса и растет ошибка восстановления на динамическом участке.
Отдельную группу составляют исследования, ориентированные на вибрационные данные. R. Pandey и соавт. исследовали сжатие вибрационных данных в распределенных беспроводных системах мониторинга состояния и показали применимость методов обработки сигнала для передачи данных от сенсорных узлов [8]. В российской литературе О. В. Панина и соавт. предложили нейросетевой подход к анализу вибрационных сигналов горного оборудования для предупреждения аварийных ситуаций [9]. Модель обучалась на данных реального оборудования и классифицировала состояния от нормального до предаварийного, что подтверждает использование виброданных в задачах прогноза технического состояния.
Прикладная направленность вибродиагностики демонстрируется на различных типах объектов. Для промышленного оборудования описана система на основе интернета вещей, в которой вибрация анализируется как во временной, так и в частотной области [10]. Есть и энергетические объекты. P. Baron и соавт. рассматривают использование вибродиагностики в задачах предиктивного обслуживания турбогенераторов малой гидроэлектростанции [11]. Для станочного оборудования показан вибрационный мониторинг электрошпинделя с распознаванием технического состояния по диагностическим признакам вибросигнала [12]. В совокупности эти примеры подтверждают, что изменения формы, интенсивности и структуры вибрации могут выступать устойчивыми индикаторами смены режима и развития дефектов.
Сохранение переходных процессов важно не только для восстановления сигналов, но и для выявления смены режимов. F. Forbicini и соавт. в обзоре методов анализа временных рядов компрессорных машин выделяют обнаружение неисправностей, прогнозирование отказов и выявление точек изменения режима [13]. M. Zheng и соавт. предложили модель частично контролируемого обнаружения аномалий по данным диспетчерского контроля ветроустановок, объединяющую восстановительный и прогнозный компоненты [14]. Для подобных методов потеря переходных участков при прореживании архива приводит к снижению диагностической ценности данных.
Представленная научная литература включает исследования по анализу временных рядов в задачах предиктивного обслуживания, методы сжатия временных рядов и данных датчиков интернета вещей, адаптивные подходы к сжатию с сохранением значимых признаков, а также работы по обработке вибрационных данных промышленного оборудования. Вместе с тем вопрос режимно-адаптивного архивирования агрегированных вибродиагностических показателей, при котором на стационарных участках сохраняется высокая степень сжатия, а на переходных процессах обеспечивается повышенная плотность записи без применения обучаемых моделей и идентификации объекта, освещен ограниченно. Это определяет актуальность предлагаемого подхода.
Одним из распространенных способов уменьшения объема архива является архивирование по мертвой зоне (далее – dz, от англ. dead zone): новая точка записывается только при превышении порога изменения относительно последней сохраненной. Рассматриваются агрегированные диагностические показатели, усредняемые на интервале 10–100 мс. Кратковременные импульсные воздействия проявляются в них как локальное повышение СКЗ и превышают dz, поэтому фиксируются в архиве. Задачи регистрации отдельных ударных импульсов в исходном высокочастотном вибросигнале относятся к другому уровню данных и в настоящей работе не рассматриваются.
Цель исследования – разработка и экспериментальное обоснование метода режимно-адаптивного архивирования телеметрии вибродиагностики по мертвой зоне, которая обеспечивает существенное сокращение объема хранимых данных при контролируемом уровне искажения переходных процессов.
Исследование направлено на решение следующих задач:
1. Разработать алгоритм режимно-адаптивного архивирования по мертвой зоне с детектором режима и механизмом гистерезиса.
2. Реализовать имитационную модель сигнала среднеквадратичного значения виброскорости в среде SimInTech и организовать экспорт данных для последующего анализа.
3. Провести численный эксперимент и выполнить сравнение стратегий архивирования, включая запись всех отсчетов, архивирование с фиксированным порогом (малым и большим) и режимно-адаптивное архивирование, по показателям степени сжатия, средней абсолютной ошибки, среднеквадратичной ошибки и максимальной ошибки на переходном участке.
4. Сформулировать практические рекомендации по настройке параметров алгоритма для применения в системах вибродиагностики.
Научная значимость исследования состоит в обосновании режимно-зависимой настройки порога мертвой зоны, при которой параметры архивирования выбираются с учетом различий между стационарными и переходными режимами. Это позволяет повышать точность сохранения переходных процессов при сохранении высокой степени сжатия данных. Практическая значимость исследования заключается в возможности применения предложенного подхода при архивировании агрегированных диагностических показателей вибрации в системах промышленной эксплуатации, где требуется уменьшение объема передаваемой и хранимой телеметрии без потери информативности переходных процессов для диагностики и прогноза. В рамках исследования выдвигается гипотеза о том, что режимно-адаптивная мертвая зона с автоматическим переключением порога между dz_min в переходном режиме и dz_max в стационарном режиме на основе оценки локальной изменчивости сигнала с гистерезисом обеспечивает более выгодное соотношение между степенью сжатия и точностью сохранения переходного процесса. Предполагается, что при сопоставимой степени сжатия максимальная ошибка восстановления на переходном участке уменьшается не менее чем вдвое по сравнению с архивированием при фиксированном широком пороге dz_max.
Материалы и методы исследования
В качестве архивируемой величины рассматривается агрегированный диагностический показатель вибрации – СКЗ виброскорости. Выбор этого показателя согласуется с практикой оценки вибрационного состояния машин по измерениям на невращающихся частях, где используются параметры вибрации, включая виброскорость [15, 16].
В основе рассматриваемых подходов лежит архивирование по мертвой зоне. Новая точка телеметрии записывается только при превышении заданного порога изменения относительно последней сохраненной. Для каждого отсчета ti вычисляется отклонение:
 (1)
(1)
где y(ti) – текущее измерение, ylast – значение последней записанной точки. Переменные состояния ylast и tlast, соответствующие моменту последней записи, обновляются только при выполнении записи.
Запись выполняется по двум условиям:
 , (2)
, (2)
где dz – порог мертвой зоны, Thb – период контрольной записи. Первое условие подавляет малые шумовые колебания, второе гарантирует наличие опорной точки не реже одного раза в Thb секунд даже при отсутствии значимых изменений. В работе принято Thb = 1 с.
Недостаток фиксированного порога состоит в том, что одно и то же значение dz применяется и на стационарных участках, и при переходных процессах. Большой dz дает высокое сжатие в стационаре, но разрежает запись перехода и увеличивает ошибку восстановления. Малый dz сохраняет форму перехода, однако на стационаре возрастает число шумовых записей и снижается степень сжатия.
Предлагаемый подход устраняет это противоречие. Порог мертвой зоны задается как кусочно-постоянная функция режима работы объекта:
 (3)
(3)
В стационарном режиме широкий порог dz_max подавляет шумовые колебания и обеспечивает высокое сжатие. На переходных участках порог автоматически снижается до dz_min, что повышает плотность записей и сохраняет форму перехода. Переключение выполняется детектором режима с гистерезисом, что снижает вероятность ложных срабатываний при шумовых всплесках.
Для идентификации режима вводится скользящее стандартное отклонение σ(ti), вычисляемое по последним W отсчетам сигнала, где W – размер скользящего окна:
 (4)
(4)
где 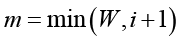 .
.
В работе приняты Δt = 0,01 с и W = 150, то есть σ(ti) оценивает изменчивость сигнала на интервале 1,5 с (150 отсчетов при шаге 0,01 с). В стационарном режиме σ(ti) близко к уровню шума измерительного канала ση. В переходном процессе, когда внутри окна оказываются значения разных уровней, σ(ti) возрастает.
Для разделения режимов вводится порог σth. Его значение определяется относительно ση, где ση – среднеквадратическое отклонение шума измерительного канала, оцениваемое по заведомо стационарному участку сигнала. Порог вычисляется по правилу
σth = kσ ∙ ση , (5)
где kσ – коэффициент запаса, задающий отступ порога от фонового уровня шума. При ση ≈ 0,020 и kσ = 1,25 получаем σth ≈ 0,025.
Для подавления ложных переключений вблизи порога σth применяется временной гистерезис, реализованный двумя счетчиками. Счетчик cntup отслеживает число последовательных отсчетов, для которых σ(ti) > σth. Счетчик cntdown отслеживает число последовательных отсчетов, для которых σ(ti) ≤ σth. На каждом шаге обновляется только один из счетчиков, а второй сбрасывается в ноль.
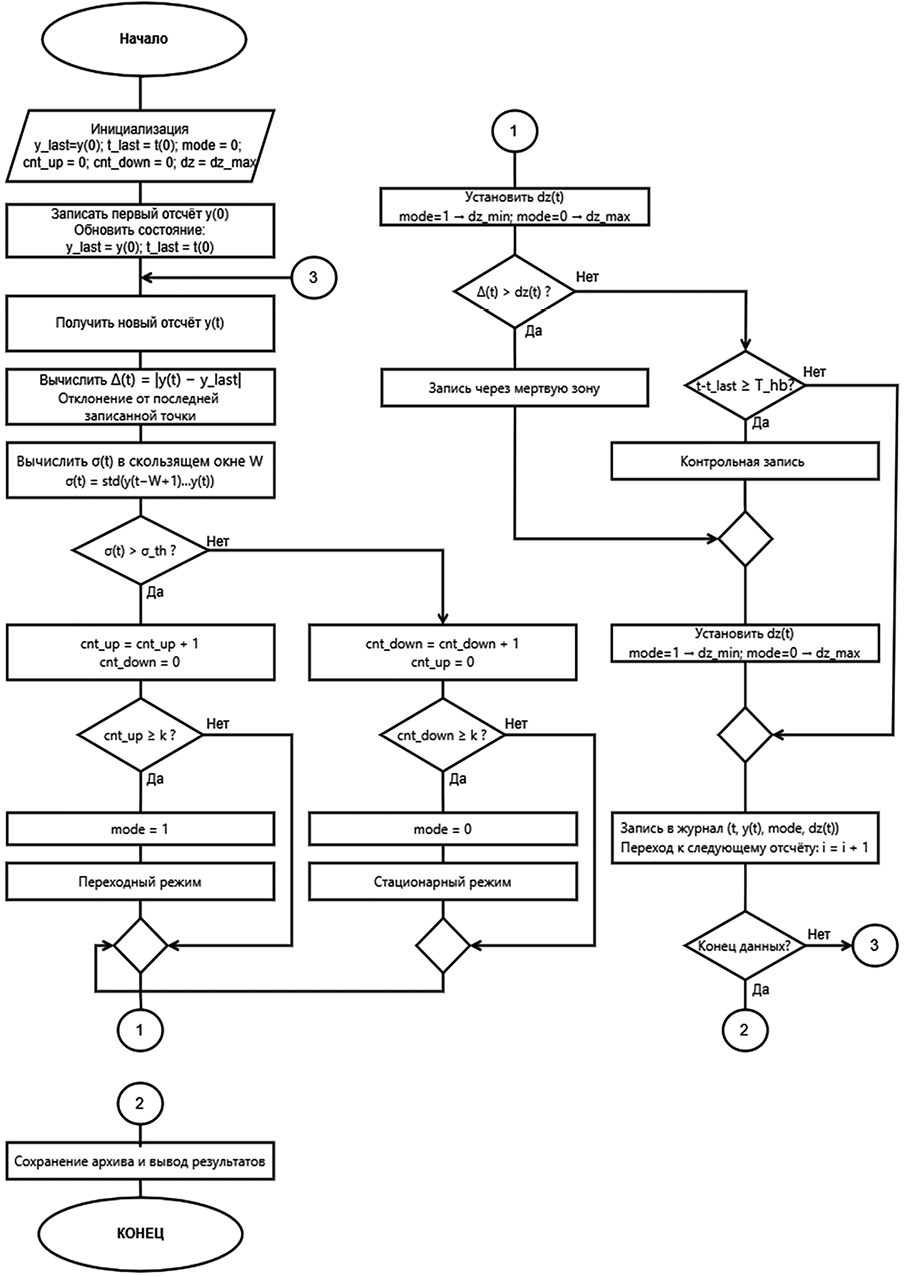
Рис. 1. Блок-схема алгоритма режимно-адаптивного архивирования по мертвой зоне
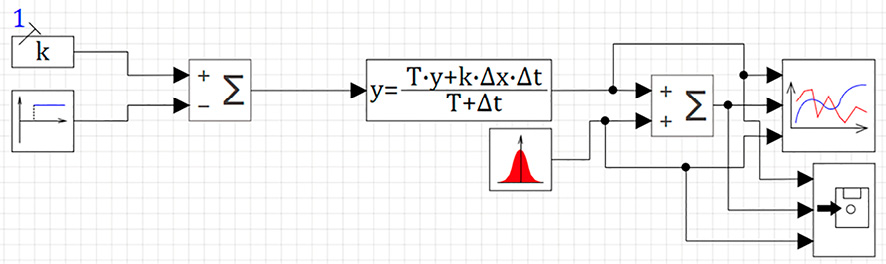
Рис. 2. Модель в среде SimInTech Примечание: составлен авторами по результатам данного исследования
Переключение режима выполняется только при достижении одним из счетчиков порогового значения K, где K – число отсчетов подтверждения (параметр гистерезиса). Переход в переходный режим (mode = 1) происходит при cntup ≥ K и текущем mode = 0. Возврат в стационарный режим (mode = 0) происходит при cntdown ≥ K и текущем mode = 1. Если ни одно из этих условий не выполнено, значение mode сохраняется без изменений.
Время подтверждения составляет
 (6)
(6)
При K = 30 и Δt = 0,01 с получаем Tconfirm = 0,3 с. Это означает, что кратковременные всплески σ(ti) продолжительностью менее 0,3 с не приводят к смене режима, что исключает переключения порога dz(ti).
Полная логика алгоритма, включая инициализацию переменных состояния, детектор режима с гистерезисом, адаптивное переключение порога dz(t) и правило записи, представлена на рис. 1.
Примечание: составлен авторами по результатам данного исследования
В среде SimInTech реализована модель на рис. 2, формирующая сигнал СКЗ виброскорости с характерными стационарными и переходными участками.
Сигнал задается как
 (7)
(7)
где s(t) – детерминированная составляющая, η(t) – аддитивный гауссов шум с ση ≈ 0,020, моделирующий погрешность измерительного канала. Составляющая s(t) описывает изменение уровня с 1,0 до 0,7 в относительных единицах через инерционное звено первого порядка; переходный процесс начинается при t ≈ 5 с и длится около 2 с (рис. 2).
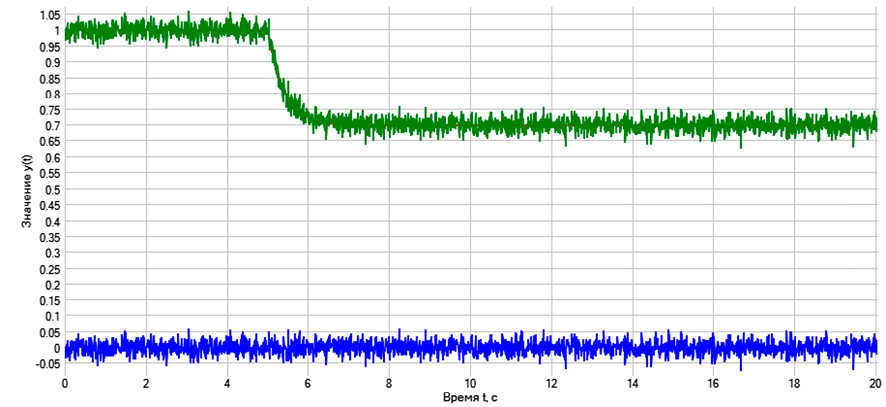
Рис. 3. Исходные данные из SimInTech Примечание: составлен авторами по результатам данного исследования
Результаты исследования и их обсуждение
На рис. 3 представлены измеренный сигнал y(t) и эталонный сигнал x(t) без шума. До t ≈ 5 с наблюдается стационарный уровень около 1,0, затем следует переходный процесс, и к t ≈ 7 с устанавливается новый уровень около 0,7. В нижней части рисунка показана шумовая компонента η(t) с уровнем σ_η ≈ 0,020, используемым при выборе порогов алгоритма. Стационарные участки занимают основную часть времени наблюдения, поэтому их прореживание дает основной эффект сокращения объема архива (рис. 3).
Сопоставлены три стратегии архивирования для сигнала y(t) (рис. 4). На каждой панели представлены исходный зашумленный сигнал, восстановленная по архивным точкам кривая и записанные точки, дополнительно указаны число записей и степень сжатия.
При фиксированном пороге dz = 0,015 записано 1222 точки из 2000, степень сжатия равна 1,6. Поскольку порог ниже уровня шума ση ≈ 0,020, фиксируется значительная часть шумовых колебаний, поэтому сокращение объема данных оказывается минимальным, хотя восстановление получается точным.
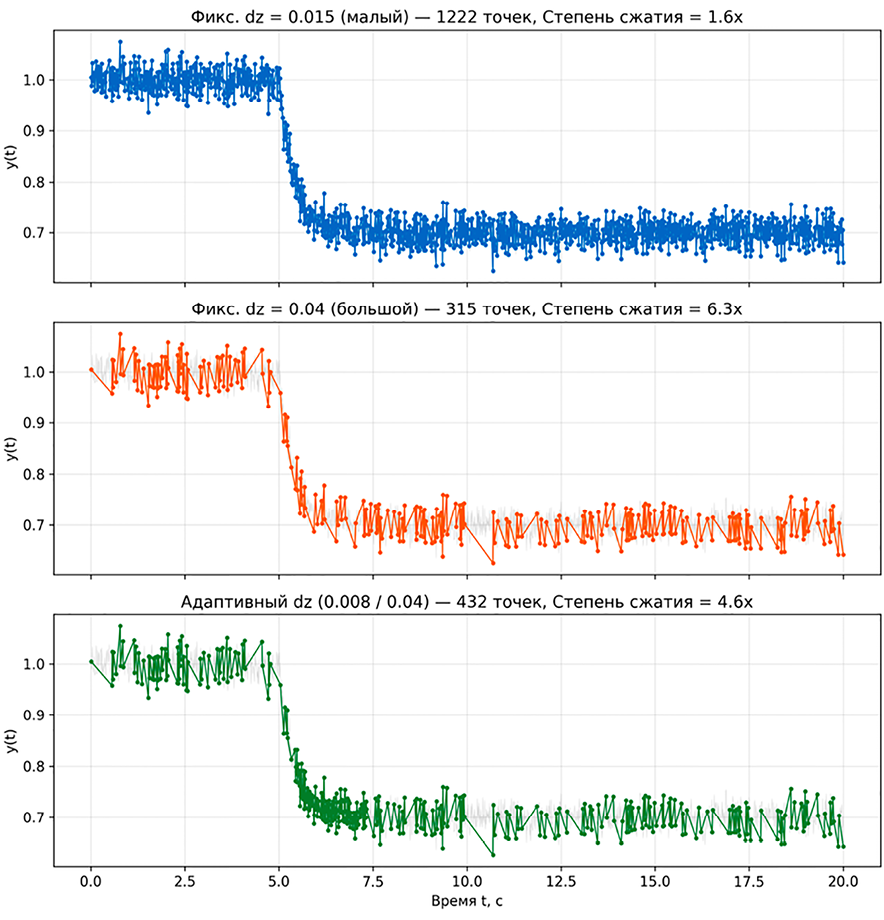
Рис. 4. Сравнение трех стратегий архивирования Примечание: составлен авторами по результатам данного исследования
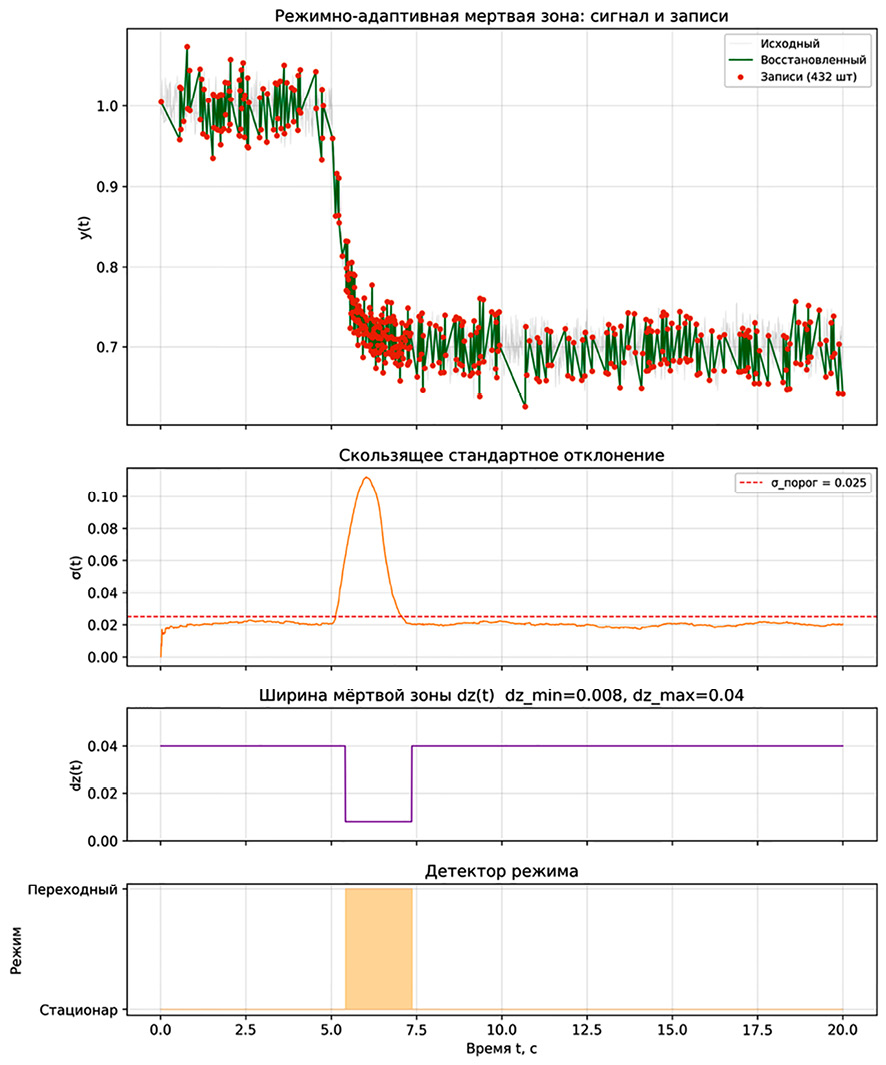
Рис. 5. Детальная работа адаптивного метода Примечание: составлен авторами по результатам данного исследования
При фиксированном пороге dz = 0,04 записано 315 точек, степень сжатия равна 6,3. На стационарных участках записи определяются преимущественно периодической контрольной записью. На переходном участке записи остаются разреженными, форма перехода сглаживается, а максимальная ошибка на переходном участке достигает 0,068, что составляет около 23 % амплитуды перехода. В режимно-адаптивном варианте используется dz_max = 0,04 на стационарных участках и dz_min = 0,008 на переходном участке. Записано 432 точки, степень сжатия равна 4,6. Дополнительные 117 точек относительно варианта с фиксированным порогом dz = 0,04 сосредоточены в области переходного процесса и обеспечивают снижение максимальной ошибки на переходном участке с 0,068 до 0,027, то есть в 2,6 раза.
Рассмотрена работа режимно-адаптивного алгоритма в виде четырех синхронизированных по времени панелей (рис. 5). Первая панель содержит зашумленный сигнал y(t), восстановленную кривую ŷ(t) и 432 записанные точки. На стационарных участках при t < 5 с и t > 7,5 с точки разрежены и определяются преимущественно контрольной записью с периодом Thb = 1 с, тогда как на переходном участке при t ≈ 5–7,5 с плотность записей возрастает. Вторая панель показывает скользящее стандартное отклонение σ(t). На стационарных участках σ(t) близко к ση ≈ 0,020 и не превышает порога σth = 0,025. В переходном процессе σ(t) возрастает до 0,11 при t ≈ 6 с, после чего возвращается к фоновому уровню. Третья панель отражает изменение порога dz(t). После подтверждения переходного режима в течение Tconfirm = 0,3 с порог переключается с dz_max = 0,04 на dz_min = 0,008, что повышает плотность записей; после устойчивого возврата σ(t) ниже σth порог возвращается к dz_max. Четвертая панель показывает сигнал режима mode(t), где 0 соответствует стационарному режиму, 1 – переходному процессу. Переходный интервал при t ≈ 5,4–7,8 с согласуется с ростом числа записей и уменьшением dz(t), что подтверждает согласованную работу детектора режима, адаптивного порога и правила записи.
Приведен увеличенный фрагмент переходного процесса на интервале t = 4–8 с (рис. 6). Красной штриховой линией показан эталонный сигнал x(t). При dz = 0,015 восстановленная кривая близка к эталону, но степень сжатия невелика. При dz = 0,04 переходный участок записывается разреженно, максимальная ошибка достигает 0,068. Режимно-адаптивный вариант до обнаружения перехода работает аналогично варианту dz = 0,04, после переключения плотность записей резко возрастает. На графике заметна небольшая задержка обнаружения, обусловленная шириной окна W и временем подтверждения Tconfirm.
Приведены гистограммы ошибок восстановления для трех методов по всем 2000 отсчетам (рис. 7). При dz = 0,015 ошибки сосредоточены вблизи нуля. При dz = 0,04 распределение шире из-за крупных отклонений на переходном участке. Для режимно-адаптивного метода крупные отклонения выражены слабее, поскольку на переходе порог снижается до dz_min и плотность записей возрастает.
Выведена зависимость среднеквадратичной ошибки восстановления от степени сжатия (рис. 8). Режимно-адаптивный метод обеспечивает степень сжатия 4,6 при среднеквадратичной ошибке 0,025 и одновременно снижает максимальную ошибку на переходном участке в 2,6 раза по сравнению с фиксированным широким порогом.
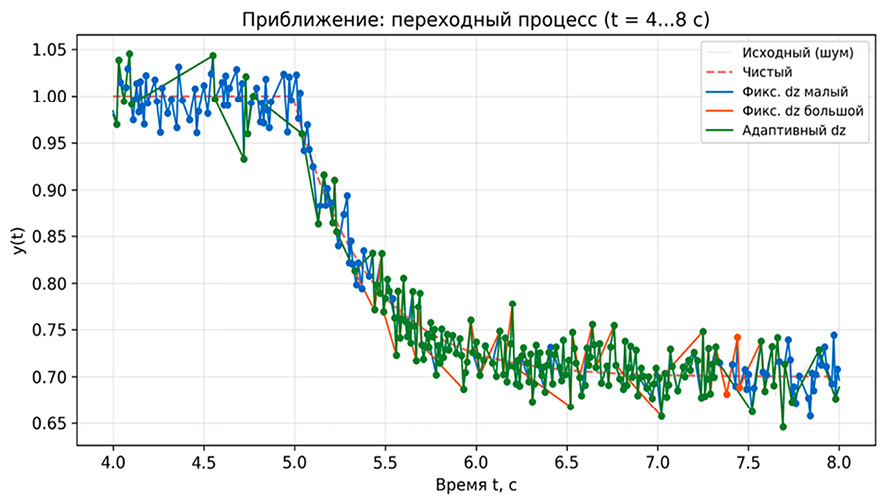
Рис. 6. Увеличенный участок переходного процесса на интервале t = 4–8 с, сравнение восстановленных сигналов трех методов с эталонным сигналом x(t) Примечание: составлен авторами по результатам данного исследования
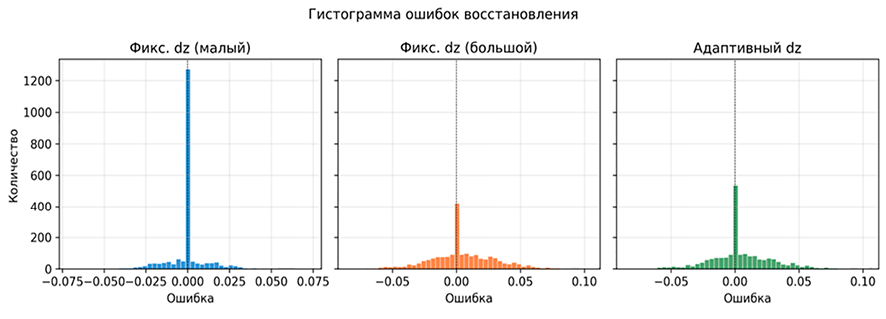
Рис. 7. Сравнение распределений ошибок восстановления для трех методов архивирования Примечание: составлен авторами по результатам данного исследования
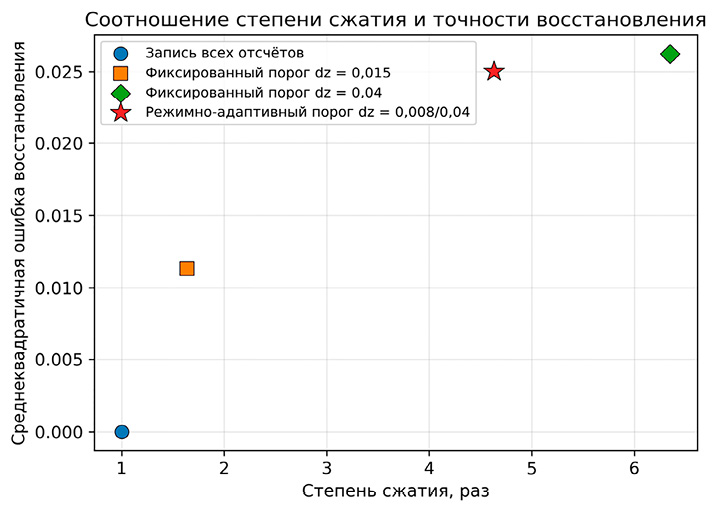
Рис. 8. Зависимость среднеквадратичной ошибки восстановления от степени сжатия архива Примечание: составлен авторами по результатам данного исследования
Результаты численного эксперимента
|
Записано точек |
Степень сжатия |
Средняя абсолютная ошибка |
Среднекв. ошибка |
Макс. ошибка |
Макс. ошибка на переходе |
|
|
Фикс. dz (малый) |
1222 |
1,6 |
0,005664 |
0,011322 |
0,072831 |
0,039803 |
|
Фикс. dz (большой) |
315 |
6,3 |
0,018937 |
0,026233 |
0,102881 |
0,068326 |
|
Адаптивный dz |
432 |
4,6 |
0,017210 |
0,025024 |
0,102881 |
0,026750 |
Примечание: составлена авторами в дополнение к сравнению полученных результатов
Для комплексного сопоставления стратегий по показателям качества архивирования, включая среднюю ошибку и максимальную ошибку на переходном участке, приведены результаты численного эксперимента (таблица).
При фиксированном пороге dz = 0,015 степень сжатия равна 1,6, поскольку значительная часть шумовых колебаний превышает порог при σ_η ≈ 0,020. При dz = 0,04 степень сжатия достигает 6,3. Режимно-адаптивный метод обеспечивает степень сжатия 4,6. Дополнительные 117 записей по сравнению с фиксированным широким порогом сосредоточены на переходном участке, тогда как на стационаре оба метода работают одинаково.
Средняя абсолютная ошибка составляет 0,0172 для режимно-адаптивного метода и 0,0189 для фиксированного широкого порога. Среднеквадратичная ошибка равна 0,0250 и 0,0262 соответственно. Различия невелики, поскольку около 90 % времени сигнал находится на стационаре, где обе стратегии совпадают.
Ключевое различие проявляется в максимальной ошибке на переходном участке. При dz = 0,04 она равна 0,068, что составляет около 23 % амплитуды перехода. Режимно-адаптивный метод снижает ее до 0,027, то есть в 2,6 раза. Достигнутая величина сопоставима с σ_η ≈ 0,020, что означает сохранение формы перехода с точностью, близкой к ограничению измерительного канала. Максимальная ошибка на всем интервале для обоих методов равна 0,103 и обусловлена шумовым выбросом на стационаре между контрольными записями.
Гипотеза требовала снижения максимальной ошибки на переходном участке не менее чем вдвое при сопоставимой степени сжатия. Степень сжатия составила 4,6 против 6,3, ошибка снизилась с 0,068 до 0,027, то есть в 2,6 раза. Оба условия выполнены.
Заключение
В работе предложен и экспериментально исследован метод режимно-адаптивного архивирования телеметрии вибродиагностики на основе мертвой зоны, ориентированный на снижение объема хранимых данных при сохранении информативности переходных процессов. Метод основан на автоматическом переключении порога мертвой зоны между dz_min в переходном режиме и dz_max в стационарном режиме, при этом выбор режима выполняется детектором на основе скользящего среднеквадратического отклонения σ(t) с механизмом гистерезиса, что снижает вероятность ложных срабатываний при шумовых всплесках. Для проверки подхода реализована имитационная модель сигнала среднеквадратичного значения виброскорости в среде SimInTech, включающая переход уровня 1,0 к 0,7 через инерционное звено первого порядка и аддитивный гауссов шум с ση ≈ 0,020; сформирован массив из 2000 отсчетов при шаге Δt = 0,01 с и обеспечен экспорт данных для последующего анализа. Сравнение трех стратегий архивирования, включавших фиксированные пороги dz = 0,015 и dz = 0,04 и режимно-адаптивный вариант dz_min/dz_max = 0,008/0,04, показало, что режимно-адаптивный метод обеспечивает степень сжатия 4,6 при максимальной ошибке на переходном участке 0,027, тогда как вариант с фиксированным широким порогом обеспечивает степень сжатия 6,3 при максимальной ошибке 0,068; тем самым точность сохранения переходного процесса повышается в 2,6 раза при степени сжатия того же порядка, что подтверждает сформулированную гипотезу. Показано, что параметры настройки могут быть выражены через оценку уровня шума измерительного канала ση, определяемую по стационарному участку, что позволяет выполнять настройку без идентификации модели объекта; дополнительное снижение максимальной ошибки на стационарных участках достигается сокращением периода контрольной записи Thb до 0,5 с за счет увеличения плотности контрольных точек.
Conflict of interest
Financing
Библиографическая ссылка
Журавлева М. О., Киселев Д. С., Зорина Н. В. РЕЖИМНО-АДАПТИВНОЕ АРХИВИРОВАНИЕ ТЕЛЕМЕТРИИ ВИБРОДИАГНОСТИКИ НА ОСНОВЕ МЕРТВОЙ ЗОНЫ С СОХРАНЕНИЕМ ПЕРЕХОДНЫХ ПРОЦЕССОВ И УМЕНЬШЕНИЕМ ОБЪЕМА ДАННЫХ // Современные наукоемкие технологии. 2026. № 6. С. 98-109;URL: https://top-technologies.ru/en/article/view?id=40822 (дата обращения: 03.07.2026).
DOI: https://doi.org/10.17513/snt.40822