


Scientific journal
Modern high technologies
ISSN 1812-7320
"Перечень" ВАК
ИФ РИНЦ = 1,279
ALGORITHMS FOR NON-MARKER VIDEO ANALYSIS OF WALKING BIOMECHANICS BASED ON THE MEDIAPIPE PLATFORM: METROLOGICAL CERTIFICATION AND COMPARISON WITH INSTRUMENTAL MARKER ANALYSIS

Введение
Инструментальный анализ ходьбы является признанным эталоном объективизации двигательных нарушений в клинической биомеханике, неврологии и реабилитологии [1–3]. Стационарные оптические системы захвата движения (Vicon, Qualisys, BTS Bioengineering) обеспечивают пространственную точность локализации светоотражающих маркеров порядка 0,5 мм, что соответствует уровню научных исследований, однако высокая стоимость оборудования и трудоемкость процедуры ограничивают распространенность указанных систем в клинической практике [4].
Развитие сверточных нейронных сетей оценки положения тела человека (Human Pose Estimation, HPE), представленных архитектурами OpenPose, MediaPipe BlazePose, MMPose, инициировало сдвиг в направлении безмаркерного видеоанализа движений, обеспечивающего пространственную точность определения двумерных координат ключевых точек 5–10 мм при дистанции съемки 3–4 м, что приближается к точности маркерных систем для крупных анатомических сегментов [5].
Актуальность внедрения алгоритмов безмаркерного видеоанализа в клиническую практику подтверждается растущим числом метаанализов и систематических обзоров. В частности, недавний систематический обзор с метаанализом показал, что безмаркерные системы сопоставимы с маркерными по точности, валидности и надежности при оценке пространственно-временных параметров ходьбы, а для кинематики тазобедренного и коленного суставов во фронтальной плоскости также демонстрируют высокую степень согласия [6]. Важно отметить, что точность работы HPE-алгоритмов, в том числе MediaPipe, критически зависит от таких факторов, как настройки камеры, архитектура бэкбона и состав обучающих выборок [7]. Однако, несмотря на многообещающие результаты, остается ряд открытых вопросов. Текущая доказательная база, касающаяся надежности (ретестовой и межсессионной) PEA-систем в целом, ограничена [8]. Кроме того, для голеностопного сустава, особенно в трансверсальной и фронтальной плоскостях, до сих пор характерна пониженная валидность и надежность измерений [6]. Многообещающие результаты были получены при применении MediaPipe для выявления аномалий ходьбы: система показала эффективность при детекции нарушений у пациентов с саркопенией (точность 97 %) и болезнью Паркинсона (88 %) [9]. С другой стороны, прямое сравнение с маркерной системой Vicon выявило лишь умеренное согласие (ICC < 0,9) при оценке углов в тазобедренном и коленном суставах у здоровых людей с помощью MediaPipe, что свидетельствует о необходимости дальнейшего совершенствования модели [10–12]. Таким образом, для широкого клинического внедрения MediaPipe и подобных алгоритмов необходимы дальнейшие стандартизированные метрические исследования по валидации и сопоставлению с референсными системами, особенно на различных клинических когортах.
Цель исследования – настоящее исследование посвящено разработке программного комплекса трехмерного безмаркерного видеоанализа биомеханики ходьбы и его метрологической аттестации в сопоставлении с эталонной системой Qualisys.
Материалы и методы исследования
Архитектура программного комплекса
Программный комплекс реализован в среде Python 3.11 в виде модульной системы с разделением функциональной ответственности между подсистемами обработки видео, биомеханического анализа, клинической оценки и экспорта результатов. Концептуальная схема архитектуры представлена на рис. 1 и 2. Технологический конвейер обработки данных содержит 16 последовательных вычислительных этапов. Этап нулевой инициирует процедуру предварительного контроля качества (pre-flight check) видеозаписи по 10 параметрам, включающим длительность фрагмента, частоту кадров, пространственное разрешение, среднюю видимость ключевых точек, видимость дистальных сегментов нижних конечностей и индекс асимметрии обзора. Первый и второй этапы выполняют детекцию 33 ключевых точек скелета модели MediaPipe Pose Landmarker (топология COCO + Hand) в каждом кадре сагиттального и фронтального видеопотоков с последующей стереотриангуляцией. Этапы цифровой фильтрации (этап 2.7) и коррекции анатомических ограничителей реализуют каскадную обработку траекторий, описанную в подразделе 2.2; перечисленные этапы сбора видеоданных и обработки сигналов отражены на рис. 1. Биомеханический анализ (этап 3) формирует 12 кинематических параметров суставов и 10 спатиотемпоральных характеристик. На этапах 4–6 рассчитываются 8 клинических индексов (POMA, GMFCS, FAC, EVGS, GPS, GDI, PCI, GVS) и производится автоматическая классификация походки. Этапы 7–8 обеспечивают визуализацию и экспорт результатов в форматы TXT-отчета, JSON, CSV и индустриального стандарта C3D. Этапы биомеханического анализа, клинической интерпретации и экспорта результатов представлены на рис. 2.
Характеристика валидационной выборки
Метрологическая валидация программного комплекса выполнена на пациенте с диагнозом «детский церебральный паралич, спастическая диплегия», паттерн Crouch gait, для которого имелся синхронный эталонный протокол маркерного анализа Qualisys. Антропометрические данные обследуемого: возраст 12 лет, мужской пол, рост 1,52 м, масса тела 65,5 кг, индекс массы тела 28,3 кг/м2. Видеосъемка выполнена в режиме overground (ходьба по горизонтальной поверхности) двумя цифровыми видеокамерами с пространственным разрешением 1920×1080 пикселей и частотой кадров 30 Гц с дистанции 3,5 м от траектории движения. Калибровочная дистанция D_cal = 2,40 м обозначалась контрастными маркерами на полу.
Математическая модель и алгоритмы
Стереотриангуляция координат ключевых точек
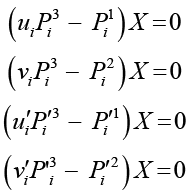
Пусть пиксельные координаты i-й ключевой точки на изображениях двух камер заданы векторами
 (1)
(1)
где ui и vi – пиксельные координаты i-й ключевой точки на изображении первой камеры, uʹi и vʹi – ее координаты на изображении второй камеры, T – операция транспонирования.
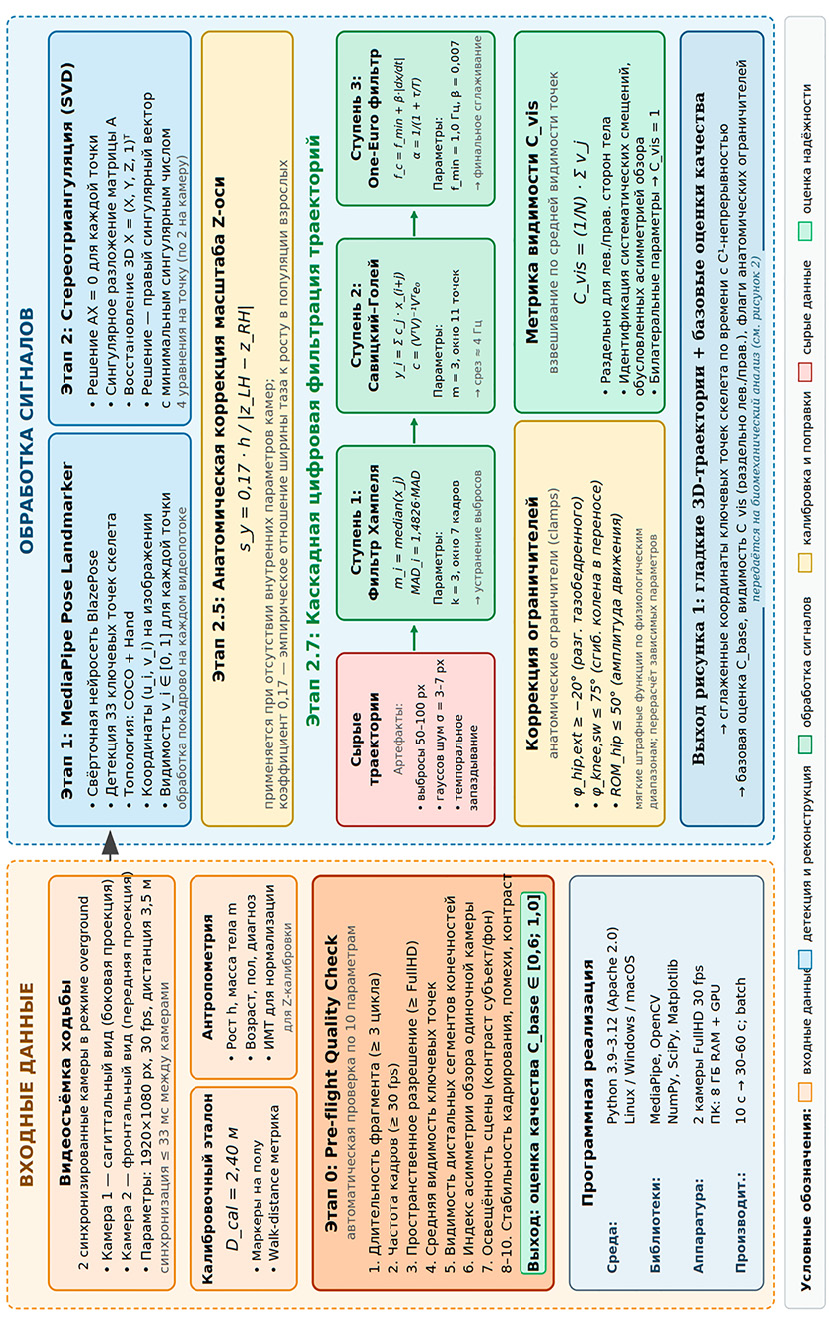
Рис. 1. Сбор видеоданных и обработка сигналов Примечание: составлен авторами по результатам исследования
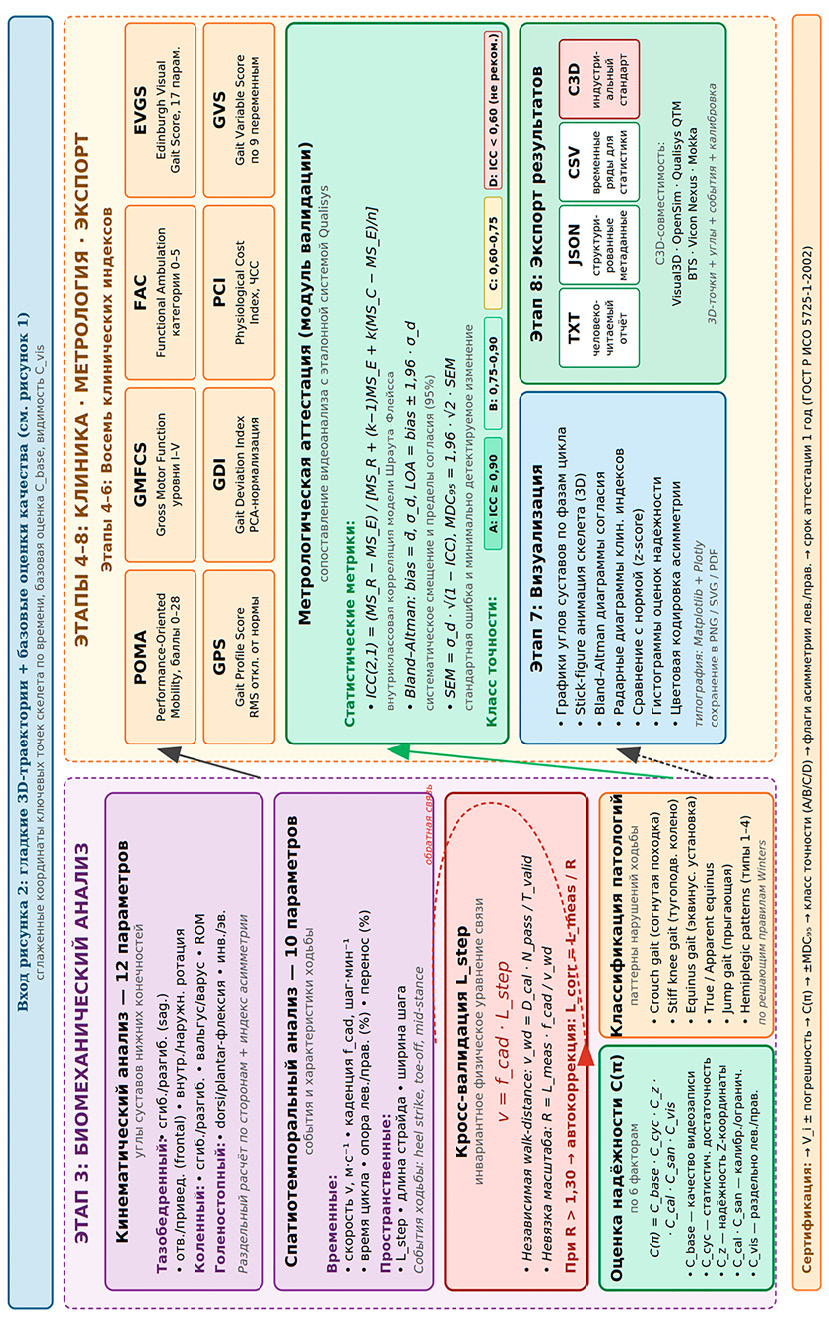
Рис. 2. Биомеханический анализ, клиническая интерпретация и экспорт результатов Примечание: составлен авторами по результатам исследования
Трехмерная координата X = (X, Y, Z, 1)ᵀ восстанавливается решением переопределенной системы линейных уравнений в однородных координатах:
 , (2)
, (2)
где Pᵢʲ обозначает j-ю строку матрицы проекции i-й камеры размерности 3×4.
Объединение приведенных уравнений формирует матричную задачу AX = 0, решаемую методом сингулярного разложения (SVD):
 , (3)
, (3)
где A – матрица системы уравнений (2); U и V – ортогональные матрицы левых и правых сингулярных векторов; Σ – диагональная матрица сингулярных чисел в порядке убывания; vmin – правый сингулярный вектор, соответствующий минимальному сингулярному числу.
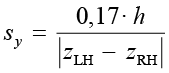
Решением является правый сингулярный вектор матрицы A, соответствующий минимальному сингулярному числу. При отсутствии априорных данных о внутренних параметрах камер (фокусном расстоянии, главной точке) применяется анатомическая коррекция масштаба медиолатеральной оси, основанная на эмпирически установленной антропометрической пропорции:
 , (4)
, (4)
где sy – корректирующий масштабный коэффициент медиолатеральной оси, h – антропометрический рост обследуемого, zLH и zRH – Z-координаты левого и правого тазобедренных суставов, коэффициент 0,17 представляет отношение среднестатистической ширины таза к росту в популяции.
Каскадная схема цифровой фильтрации траекторий
Сырые временные ряды координат ключевых точек, формируемые нейросетевым детектором, содержат три типа артефактов с различающимися статистическими характеристиками: одиночные выбросы амплитудой 50–100 пикселей, обусловленные ошибками детекции в отдельных кадрах; низкочастотный гауссов шум с среднеквадратичным отклонением 3–7 пикселей, связанный с тренировочной неопределенностью нейронной сети; систематическое запаздывание реакции на быстрые движения, обусловленное темпоральным сглаживанием в архитектуре детектора. Подавление каждого из выделенных типов шумов требует применения специализированного алгоритма фильтрации, что обусловливает целесообразность каскадной обработки по схеме: сырые траектории → фильтр Хампеля (устранение выбросов) → фильтр Савицкого – Голея (полиномиальное сглаживание) → One-Euro фильтр (адаптивное подавление шума) → гладкие траектории.
Первая ступень каскада – фильтр Хампеля – устраняет статистические выбросы посредством робастной оценки локальной дисперсии через медианное абсолютное отклонение (MAD) в скользящем окне:

 (5)
(5)
 , (6)
, (6)
где xi – исходное значение сигнала в i-м кадре,  – его отфильтрованное значение, mi – медиана сигнала в скользящем окне шириной 2k + 1, MADi – медианное абсолютное отклонение в том же окне, 1,4826 – нормировочная константа, приводящая оценку MAD к стандартному отклонению гауссова распределения; 𝕀(·) обозначает индикаторную функцию, k = 3 – пороговый коэффициент обнаружения выброса, ширина окна 2k + 1 = 7 кадров эквивалентна временному интервалу 233 мс при частоте дискретизации 30 Гц.
– его отфильтрованное значение, mi – медиана сигнала в скользящем окне шириной 2k + 1, MADi – медианное абсолютное отклонение в том же окне, 1,4826 – нормировочная константа, приводящая оценку MAD к стандартному отклонению гауссова распределения; 𝕀(·) обозначает индикаторную функцию, k = 3 – пороговый коэффициент обнаружения выброса, ширина окна 2k + 1 = 7 кадров эквивалентна временному интервалу 233 мс при частоте дискретизации 30 Гц.
Вторая ступень каскада – полиномиальная фильтрация Савицкого – Голея – реализует подавление высокочастотного шума посредством локальной аппроксимации скользящим полиномом степени m методом наименьших квадратов:
 , (7)
, (7)
где yi – сглаженное значение в i-м кадре, xi+j – значения сигнала в окрестности ширины 2k + 1 точек, cj – весовые коэффициенты полиномиальной аппроксимации, индекс j пробегает значения от –k до +k.
Коэффициенты cⱼ определяются однократной операцией псевдоинверсии матрицы Вандермонда V размерности (2k+1)×(m+1):
 (8)
(8)
Вектор e₀ представляет канонический базис с единичной координатой в центральной позиции. В программной реализации использованы параметры m = 3 (кубическая интерполяция, обеспечивающая C¹-непрерывность производной) и k = 5 (окно 11 точек, эффективный фильтр низких частот с частотой среза приблизительно 4 Гц).
Третья ступень каскада – адаптивный фильтр One-Euro [13] – реализует финальное сглаживание с динамическим балансом между подавлением остаточного шума и сохранением быстрых физиологических движений посредством экспоненциального фильтра низких частот первого порядка:
 , (9)
, (9)
где xi – входное значение сигнала в i-м кадре, ŷi – выходное (сглаженное) значение, ŷi–1 – сглаженное значение в предыдущем кадре, α ∈ (0,1) – коэффициент сглаживания, определяющий степень влияния текущего измерения относительно предыстории.
Параметр α адаптивно изменяется в зависимости от мгновенной частоты среза, монотонно возрастающей пропорционально модулю производной сигнала:
 , (10)
, (10)
где fc – текущая (адаптивная) частота среза фильтра, fmin – минимальная частота среза при стационарном сигнале, β – коэффициент адаптации к скорости изменения сигнала, |dx/dt| – модуль производной входного сигнала, T – период дискретизации (обратная величина частоты кадров).
Эмпирически оптимизированные значения параметров: fmin = 1,0 Гц (минимальная частота среза при стационарном сигнале), β = 0,007 (коэффициент адаптации к скорости изменения сигнала), что соответствует рекомендациям [13] для биомеханических приложений с типичной шириной полосы локомоторного спектра до 6 Гц.
Алгоритмы коррекции анатомических ограничителей и кросс-валидации
Анатомически невозможные значения биомеханических параметров, формируемые в результате остаточных артефактов детекции и триангуляции, корректируются посредством системы ограничителей (clamps), функционирующих как мягкие штрафные функции относительно физиологических диапазонов. Применяемые правила: разгибание тазобедренного сустава φhip,ext ≥ −20°; сгибание коленного сустава в фазе переноса φknee,sw ≤ 75°; амплитуда движения в тазобедренном суставе ROMhip ≤ 50°. После активации ограничителя выполняется автоматический перерасчет всех зависимых производных параметров (амплитуд, моментов и индексов отклонения). Калибровка пиксельного масштаба продольной (переднезадней) оси характеризуется повышенной чувствительностью к угловым отклонениям оптических осей камер от плоскости, перпендикулярной направлению движения. Для автоматической верификации согласованности пиксельного масштаба применяется инвариантное физическое уравнение связи спатиотемпоральных параметров ходьбы:
 , (11)
, (11)
где v – средняя скорость ходьбы, fcad – каденция (частота шагов), Lstep – средняя длина одного шага.
Скорость ходьбы независимо вычисляется методом walk-distance как отношение пройденной калиброванной дистанции к суммарной длительности валидных проходов:
 , (12)
, (12)
где Dcal – длина калибровочной дистанции, Npass – количество валидных проходов в режиме overground, Tvalid – суммарное время ходьбы в валидных интервалах.
Каденция fcad определяется на основе временных интервалов между событиями heel strike (касание пяткой), детектируемыми по локальным экстремумам вертикального ускорения пяточной точки, и принципиально не зависит от пиксельного масштаба. Отношение масштабной невязки определяется выражением
 , (13)
, (13)
где Lmeasured – измеренная пиксельным методом длина шага, Lexpected – ожидаемое значение длины шага, вычисленное из инвариантного уравнения (11) через независимо полученные величины vwd и fcad. Отношение R характеризует масштабную невязку продольной оси.
При выполнении условия R > 1,30 диагностируется ошибка калибровки X-оси и активируется процедура автоматической коррекции масштаба:
 , (14)
, (14)
где Lstep,meas – исходное (измеренное) значение длины шага, Lstep,corr – значение после масштабной коррекции, R – вычисленный по (13) коэффициент масштабной невязки.
Пороговое значение R = 1,30 эмпирически верифицировано на представительной выборке валидационных записей: значение пропускает допустимое смещение нейросетевого детектора (R ≤ 1,25 для здоровых обследуемых и пациентов с нарушениями походки), однако корректно идентифицирует грубые калибровочные ошибки (R > 1,5), типичные для записей с угловым смещением камеры более 25° от номинального положения.
Взвешенная оценка надежности измерений
Каждому измеренному параметру π автоматически присваивается мультипликативная оценка надежности C(π) ∈ [0; 1], формируемая в виде произведения шести независимых факторов:
 , (15)
, (15)
где Cbase ∈ [0,6; 1,0] – базовая оценка качества видеозаписи, формируемая модулем pre-flight check; Ccyc – фактор статистической достаточности, монотонно возрастающий от 0,40 при числе обнаруженных циклов ходьбы менее 3 до 1,0 при числе циклов 10 и более; Cz – оценка надежности восстановления Z-координаты (1,0 для high, 0,5 для low); Ccal ∈ {0,7; 1,0} – фактор наличия пространственной калибровки; Csan = 0,3 при срабатывании анатомического ограничителя для соответствующего параметра; Cvis – взвешивание по средней видимости ключевых точек анатомической стороны:
 , (16)
, (16)
где vj – показатель видимости j-й ключевой точки анатомической стороны пациента (лево/право), N – общее число ключевых точек данной стороны, используемых для вычисления параметра.
Для билатеральных параметров (gait speed, cadence, double support time) принимается Cvis = 1. Раздельно вычисляются интегральные индексы надежности контралатеральных сторон тела как арифметическое среднее по всем параметрам соответствующей стороны. При выполнении условия |Cleft – Cright| > 0,20 регистрируется значимая асимметрия надежности, требующая дифференцированной клинической интерпретации.
Методика метрологической аттестации
Метрологическая аттестация программного комплекса выполнена путем попарного сопоставления значений Vi, формируемых видеоанализом, и соответствующих эталонных значений Mi, получаемых маркерной системой Qualisys на одной и той же физической записи ходьбы пациента. Применен стандартизированный набор статистических метрик согласно международному руководству по оценке методов клинических измерений и рекомендациям ГОСТ Р ИСО 5725-1-2002.
Внутриклассовый коэффициент корреляции (ICC) модели (2,1) – двухсторонняя случайная модель абсолютного согласия для одиночного измерения по классификации Шраута и Флейсса:
 , (17)
, (17)
где MSR, MSC, MSE – средние квадраты вариаций между объектами (subjects), между методами (raters) и остаточной соответственно; k = 2 – число сравниваемых методов, n – число параметров в выборке. Принятая четырехуровневая шкала классификации: ICC ≥ 0,90 соответствует классу A научной точности; диапазон 0,75 ≤ ICC < 0,90 – классу B клинической точности; 0,60 ≤ ICC < 0,75 – классу C приемлемой точности; ICC < 0,60 – классу D, не рекомендованному к клиническому применению.
Метод Бленда – Альтмана количественно характеризует систематическое смещение и пределы согласия двух методов измерения посредством анализа распределения попарных разностей:
 , (18)
, (18)
 , (19)
, (19)
 , (20)
, (20)
где di = Vi – Mi – попарная разность между значением Vi, полученным видеоанализом, и эталонным значением Mi маркерной системы для i-го параметра, bias – среднее систематическое смещение методов, σd – стандартное отклонение попарных разностей, S – выборочное стандартное отклонение всех измерений (совокупная дисперсия значений обеих методик), n – число сопоставляемых параметров, LOA (Limits of Agreement) – 95 %-ные пределы согласия двух методов измерения.
Стандартная ошибка измерения (SEM) характеризует дисперсию повторных измерений одного параметра и определяется через ICC посредством соотношения
 , (21)
, (21)
где SEM – стандартная ошибка измерения, выраженная в единицах измеряемой величины; S – выборочное стандартное отклонение всех измерений (величина, определяемая после формулы (22)); ICC – внутриклассовый коэффициент корреляции, рассчитанный по (17).
Минимально детектируемое изменение параметра определяется как наименьший сдвиг, статистически значимо превышающий шум измерения с доверительной вероятностью 95 %:
 , (22)
, (22)
где MDC95 – минимально детектируемое изменение параметра на уровне доверительной вероятности 95 %; SEM – стандартная ошибка измерения, определенная по (21); множитель  учитывает, что сравниваются два независимых измерения одной величины (каждое – со своей ошибкой SEM), и критерий соответствует двухстороннему 95 %-доверительному интервалу нормального распределения.
учитывает, что сравниваются два независимых измерения одной величины (каждое – со своей ошибкой SEM), и критерий соответствует двухстороннему 95 %-доверительному интервалу нормального распределения.
Параметр MDC95 имеет принципиальное клиническое значение при мониторинге результатов реабилитационного вмешательства: изменения биомеханических показателей, не превышающие установленного значения MDC95, не могут квалифицироваться как достоверный терапевтический эффект.
Результаты исследования и их обсуждение
Сопоставление спатиотемпоральных параметров
Результаты сопоставления спатиотемпоральных характеристик, формируемых разработанным программным комплексом, с эталонными значениями маркерной системы Qualisys представлены в табл. 1.
Все спатиотемпоральные параметры демонстрируют отличное согласие с эталонными значениями (абсолютная относительная погрешность не превышает 2,2 %). Внутриклассовый коэффициент корреляции спатиотемпорального блока составил ICC(2,1) = 1,000, что соответствует классу A научной точности.
Сопоставление кинематических параметров
Результаты сопоставления амплитуд движений (Range of Motion, ROM) в суставах нижних конечностей представлены в табл. 2.
Таблица 1
Сопоставление спатиотемпоральных параметров
|
Параметр |
Видео V |
Маркер M |
Δ = V − M |
Категория |
|
Скорость, м∙с–1 |
0,82 |
0,84 |
−0,02 |
Надежно |
|
Каденция, шаг∙мин–1 |
108,07 |
107,76 |
+0,31 |
Надежно |
|
Опора лев., % |
67,74 |
67,40 |
+0,34 |
Надежно |
|
Опора прав., % |
66,83 |
68,30 |
−1,47 |
Надежно |
|
Длина шага лев., м |
0,574 |
0,580 |
−0,006 |
Надежно |
|
Длина шага прав., м |
0,528 |
0,535 |
−0,007 |
Надежно |
Примечание: составлена авторами на основе полученных данных в ходе исследования.
Таблица 2
Амплитуды движений в суставах нижних конечностей (градусы)
|
Сустав |
Сторона |
Видео V |
Маркер M |
Δ |
|
Тазобедренный |
Лев. |
40,89 |
37,20 |
+3,69 |
|
Тазобедренный |
Прав. |
46,53 |
38,80 |
+7,73 |
|
Коленный |
Лев. |
45,69 |
37,20 |
+8,49 |
|
Коленный |
Прав. |
45,33 |
38,80 |
+6,53 |
|
Голеностопный |
Лев. |
13,89 |
10,70 |
+3,19 |
|
Голеностопный |
Прав. |
20,32 |
12,90 |
+7,42 |
Примечание: составлена авторами на основе полученных данных в ходе исследования.
Идентифицировано систематическое положительное смещение значений углов суставов в диапазоне +3,2° ÷ +8,5°, характерное для сопоставления безмаркерного видеоанализа с маркерными системами и обусловленное фундаментальным различием анатомической локализации ключевых точек: нейросетевой детектор MediaPipe определяет суставные центры на поверхности кожи, тогда как маркерный протокол Plug-in-Gait использует биомеханические модели Newington-Helen Hayes с поправками на положение анатомических ориентиров под маркерами. Указанное смещение является воспроизводимой характеристикой пары методов и не препятствует клиническому применению.
Метрологические показатели аттестации
Консолидированные метрологические характеристики разработанного программного комплекса представлены в табл. 3, графический анализ согласия методов – на рис. 3.
Согласно полученным метрологическим характеристикам, разработанный программный комплекс аттестован по классу B общему (предельно допускаемая погрешность ±11,95° для угловых параметров и ±50 мс для временных интервалов) с присвоением класса A научной точности для сагиттальной плоскости и спатиотемпорального блока. Срок действия метрологической аттестации составляет один год с обязательной повторной верификацией.
Таблица 3
Метрологические показатели аттестации
|
Показатель |
Значение |
Оценка |
|
ICC(2,1) общий |
0,902 |
Класс A |
|
ICC(2,1) сагиттальный |
0,902 |
Класс A |
|
ICC(2,1) спатиотемпоральный |
1,000 |
Класс A |
|
Bland-Altman bias, ° |
+6,18 |
Систем. смещение |
|
Bland-Altman σd, ° |
2,22 |
Стандарт. отклонение |
|
LOA, ° |
[+1,82; +10,53] |
95 % дов. интервал |
|
SEM, ° |
4,31 |
Ошибка измерения |
|
MDC95, ° |
11,95 |
Мин. детект. изменение |
|
RMSE сагиттальный, ° |
6,50 |
Среднеквадр. ошибка |
Примечание: составлена авторами на основе полученных данных в ходе исследования.
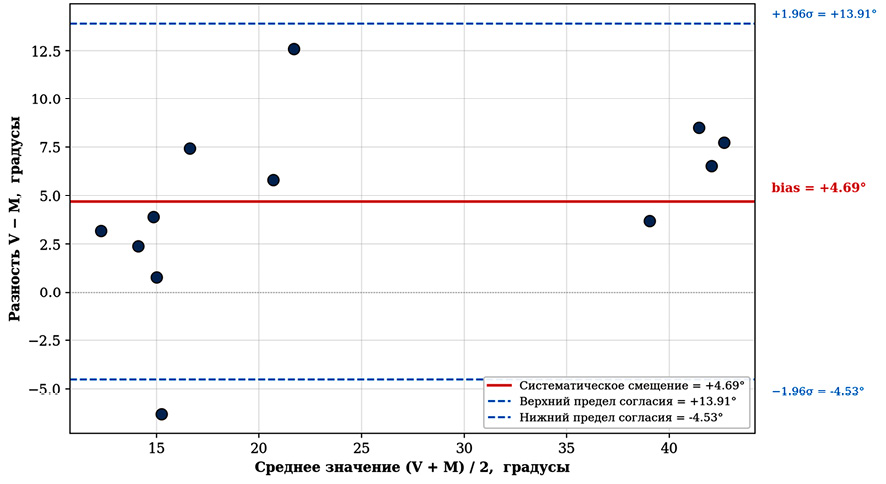
Рис. 3. Диаграмма Бленда – Альтмана для углов суставов Примечание: составлен авторами по результатам исследования
Верификация алгоритма кросс-валидации длины шага
Эффективность предложенного алгоритма автоматической самокоррекции, описанного формулами (11)–(14), верифицирована на дополнительной обследуемой – здоровой девочке возрастом 12 лет с ростом 1,50 м. До применения алгоритма результаты обработки демонстрировали нарушение инвариантного физического уравнения (11): измеренное значение Lmeasured = 1,012 м при vwd = 1,095 м∙с–1 и fcad = 107,3 шаг∙мин–1 соответствует ожидаемому значению Lexpected = 0,612 м, что определяет отношение масштабной невязки R = 1,652. Указанное значение существенно превышает установленный пороговый критерий R = 1,30, что инициирует активацию процедуры коррекции.
После применения корректирующего преобразования (14) скорректированные параметры приобрели физиологически правомерные значения: Lstep, L = 0,612 м, Lstep, R = 0,613 м, ширина шага скорректирована с 0,178 до 0,108 м, что соответствует возрастно-половым нормативам. Балл диагностической шкалы POMA-Gait возрос с 11/12 до 12/12 за счет нормализации показателя ширины шага. При этом первичные физически инвариантные параметры (gait speed, cadence) сохранили исходные значения, что подтверждает корректность алгоритмической логики.
Достигнутый уровень внутриклассовой корреляции ICC = 0,902 в сагиттальной плоскости соответствует требованиям к научно-исследовательскому уровню точности и согласуется с результатами зарубежных исследований сопоставления безмаркерных и маркерных систем: Wade et al. [5] для коленного сустава ICC = 0,87; Stenum et al. [14] ICC=0,89; Kanko et al. [15] ICC = 0,84–0,93. Идентифицированное систематическое смещение углов +6,18±2,22° представляет воспроизводимую характеристику пары методов и допускает учет калибровочной поправкой при продольных мониторинговых исследованиях.
Преимуществами разработанного программного комплекса являются: открытость исходного кода под лицензией Apache 2.0; использование стандартного видеооборудования без специализированной лаборатории; интегрированные алгоритмы автоматической коррекции артефактов; экспорт в формат C3D для совместимости с Visual3D, OpenSim, Qualisys Track Manager. Ограничения метода обусловлены применением двухкамерной конфигурации: фронтальная плоскость аттестуется по классу C (ICC ≈ 0,65–0,75) вследствие низкой надежности восстановления Z-координаты. Повышение класса фронтальной аттестации до B требует расширения системы до 3–4-камерной конфигурации.
Заключение
Разработан программный комплекс трехмерного безмаркерного видеоанализа биомеханики ходьбы, реализующий полный технологический цикл от детекции ключевых точек нейросетевыми методами до клинической интерпретации с использованием восьми международно признанных диагностических индексов. Предложены три оригинальных алгоритмических решения: каскадная схема многоступенчатой цифровой фильтрации траекторий, объединяющая фильтр Хампеля, сглаживание Савицкого – Голея и адаптивный One-Euro фильтр; алгоритм автоматической кросс-валидации длины шага через инвариантное физическое уравнение связи скорости и каденции с самокоррекцией ошибок калибровки; взвешенная по показателю видимости метрика надежности измерений раздельно для контралатеральных конечностей. Метрологическая аттестация продемонстрировала ICC = 0,902 в сагиттальной плоскости (класс A научной точности). Программный комплекс аттестован по классу B общему с предельно допускаемой погрешностью ±11,95° для угловых параметров и ±50 мс для временных интервалов.
Conflict of interest
Financing
Библиографическая ссылка
Батышева Т. Т., Тихонов С. В., Алексеева М. В., Климов Ю. А., Пеганский Д. А., Куликова О. М., Усачева Е. В. АЛГОРИТМЫ БЕЗМАРКЕРНОГО ВИДЕОАНАЛИЗА БИОМЕХАНИКИ ХОДЬБЫ НА ОСНОВЕ ПЛАТФОРМЫ MEDIAPIPE: МЕТРОЛОГИЧЕСКАЯ АТТЕСТАЦИЯ И СОПОСТАВЛЕНИЕ С ИНСТРУМЕНТАЛЬНЫМ МАРКЕРНЫМ АНАЛИЗОМ // Современные наукоемкие технологии. 2026. № 6. С. 33-44;URL: https://top-technologies.ru/en/article/view?id=40814 (дата обращения: 03.07.2026).
DOI: https://doi.org/10.17513/snt.40814