


Scientific journal
Modern high technologies
ISSN 1812-7320
"Перечень" ВАК
ИФ РИНЦ = 1,279
Application of a Genetic Algorithm for Traffic Signal Optimization Considering Regulatory Requirements and Public Transport Priority

Введение
В современных российских городах наблюдается устойчивый рост транспортных проблем, связанных с увеличением количества автомобилей и ограниченной пропускной способностью дорожной сети. Особенно остро эта ситуация проявляется в центральных районах небольших и средних городов, где статичные светофорные программы не справляются с растущей нагрузкой. Традиционные фиксированные циклы продолжительностью 90–120 с, не учитывающие реальную интенсивность движения, становятся основной причиной заторов в часы пик, снижения средней скорости транспорта и увеличения времени ожидания на перекрестках.
Мировой опыт показывает эффективность интеллектуальных транспортных систем, которые уже успешно работают не только в мегаполисах, но и в городах с населением менее 500 тыс. жителей. Однако в России их внедрение осложняется необходимостью строгого соблюдения нормативных требований ГОСТов, регламентирующих параметры работы светофоров. Эти требования, направленные на обеспечение безопасности дорожного движения, должны быть учтены в любых адаптивных алгоритмах.
Существующие методы ручной настройки светофорных программ становятся неэффективными в условиях многокритериальности задачи, когда необходимо одновременно учитывать потоки транспорта, пешеходов, приоритет общественного транспорта, нормативные ограничения и синхронизацию перекрестков. В этой связи разработка алгоритмических решений на основе методов искусственного интеллекта, в частности генетических алгоритмов, позволяет автоматизировать процесс оптимизации, минимизировать человеческий фактор и получать эффективные, нормативно-корректные решения для сложных транспортных систем [1–3].
Эффективное управление светофорным регулированием в городах является ключевым фактором обеспечения устойчивости транспортной системы, особенно в условиях ограниченной инфраструктуры и растущей нагрузки на улично-дорожную сеть. В традиционной практике светофорные циклы часто настраиваются вручную, что не позволяет оперативно учитывать динамику потоков, пешеходную активность и приоритет общественного транспорта. При этом действующие нормативные документы, в частности ГОСТ Р 52289-2004, жестко ограничивают возможные значения длительности фаз, что затрудняет гибкость решений [4].
В этой связи актуальной задачей становится формирование автоматизированного подхода, способного учитывать множество параметров – от геометрии перекрестков до интенсивности потоков и юридических ограничений. Особую важность представляет реализация приоритета для общественного транспорта без ущерба для безопасности движения и нормативных требований.
Цель исследования – разработка и реализация математической модели оптимизации параметров светофорного регулирования на базе генетического алгоритма, способного эффективно обрабатывать многомерное пространство допустимых решений с учетом действующих ГОСТов и параметров транспортных потоков.
Дополнительной задачей является обеспечение снижения совокупной задержки всех участников движения, в особенности автобусных маршрутов, а также реализация «зеленой волны» между несколькими перекрестками с учетом времени проезда. Полученное решение должно быть универсальным, масштабируемым и применимым в городах с ограниченными ресурсами для модернизации дорожной инфраструктуры.
Материалы и методы исследования
Для управления светофорными объектами разработана база данных с двумя таблицами. В таблице intersections хранятся параметры перекрестков: идентификатор, длительность цикла, зеленых фаз и время переключения. Таблица constraints содержит нормативные ограничения ГОСТ: допустимые диапазоны длительности цикла, минимальное время зеленого сигнала, интервалы для пешеходов. Отдельно предусмотрены параметры приоритета общественного транспорта: флаг активации, приоритетное направление и дополнительное время зеленой фазы. Такая структура обеспечивает гибкое управление с соблюдением нормативов [5–7].
В ходе исследования была разработана математическая модель адаптивного управления светофорным регулированием на сети перекрестков [8, 9]. Каждый перекресток описывается четырьмя ключевыми параметрами: длительностью полного цикла, продолжительностью зеленых фаз по главному и второстепенному направлениям, а также временным смещением (offset) относительно общего времени. Для сети из трех перекрестков решение кодируется 12 параметрами, формируя компактное и удобное для обработки представление.
Модель строго учитывает нормативные требования ГОСТ, включая минимальную продолжительность зеленых фаз (не менее 15 с) и необходимость обеспечения безопасного перехода пешеходов. На основе стандартной скорости пешехода 1,3 м/с рассчитаны минимальные значения времени перехода: 7,7 с для второстепенной дороги (7 м) и 10,4 с для главной (10,5 м). Эти значения жестко заложены в алгоритм как ограничения.
Особое внимание уделено проверке физической реализуемости решений. Алгоритм контролирует, чтобы сумма длительностей зеленых фаз и времени на переключения (8 с на цикл) не превышала длительности цикла. Также проверяется корректность значений offset, которые должны находиться в пределах от 0 до длительности цикла. Все эти проверки встроены непосредственно в процедуру генерации и оценки решений, что гарантирует получение только допустимых и безопасных вариантов регулирования [10–12].
Такая структура модели обеспечивает поиск оптимальных решений в строго ограниченном пространстве параметров, где каждый вариант соответствует всем нормативным требованиям и может быть реализован на практике [13–15]. Это позволяет получать реалистичные и обоснованные схемы управления светофорами, учитывающие как технические ограничения, так и требования безопасности всех участников движения [16, 17].
В ходе исследования для оптимизации параметров светофорного регулирования был успешно применен генетический алгоритм, реализованный с использованием библиотеки DEAP в среде Python. Алгоритм работает с популяцией из 300 особей, где каждая особь представляет собой возможную конфигурацию параметров трех перекрестков, кодируемую в виде 12 числовых значений: длительности полного цикла (cycle), продолжительности зеленых фаз по главному (green_main) и второстепенному (green_secondary) направлениям, а также временного смещения (offset) для синхронизации работы светофоров.
Эволюционный процесс продолжается в течение 5000 поколений, применяя оператор Blend Crossover для эффективного скрещивания особей, гауссовские мутации (mutGaussian) для локального поиска оптимальных решений и турнирную селекцию для отбора наиболее приспособленных особей на основе значений фитнес-функции. Такой подход позволяет алгоритму устойчиво сходиться к эффективным решениям, удовлетворяющим всем нормативным требованиям, при этом обеспечивая оптимальное управление транспортными потоками за счет учета множества взаимосвязанных параметров.
Особенностью данной реализации является тщательно подобранный набор генетических операторов, которые в сочетании с жесткими ограничениями, накладываемыми на пространство поиска, позволяют получать реалистичные и практически применимые решения для сложных систем светофорного регулирования с несколькими перекрестками.
Целевая функция (fitness) определяется как сумма двух ключевых компонентов: суммарной задержки транспортных потоков и штрафа за рассинхронизацию светофоров. Суммарная задержка рассчитывается по формуле
 (1)
(1)
 ,(2)
,(2)
где N – количество перекрестков;
M – количество направлений/потоков на перекрестке;
Ci – длина цикла на перекрестке i;
Gij – эффективная длина зеленой фазы для потока j на перекрестке i (с учетом бонуса для автобусов);
qij – интенсивность потока (машин в час);
wij – вес потока: 1+2*(доля автобусов);
P – штраф за нарушение координации (рассинхронизацию зеленой волны);
(Ci – Gij) – сколько времени поток ждет «красный», то есть задержка за цикл;
wij – увеличивает вклад потока, если там есть автобусы (дает приоритет ОТ);
Gij = min (Ci, Gij + bonus) где бонус может быть > 0 для автобусов (см. constraints);
Ok – offset (смещение) начала фазы на перекрестке k;
Ek – ожидаемое прибытие волны (расчет через offset первого перекрестка и travel time).
Дополнительно предусмотрена возможность расширения модели за счет учета заторных состояний. В этом случае вводится дополнительный штраф Pзатор, если кумулятивная задержка на множестве прилегающих перекрестков превышает заданный порог Dкр. Формально это выражается как
 (3)
(3)
I = {A, B, C} – множество прилегающих перекрестков (например: 1, 2, 3);
Di – суммарная задержка на перекрестке i в авт*с;
 (4)
(4)
Dобщ =  – кумулятивная задержка на A, B, C; Dкр – порог (например, 100000 авто×сек);
– кумулятивная задержка на A, B, C; Dкр – порог (например, 100000 авто×сек);
Kcong – коэффициент штрафа за затор; Pзатор – дополнительный штраф за затор;
 (5)
(5)
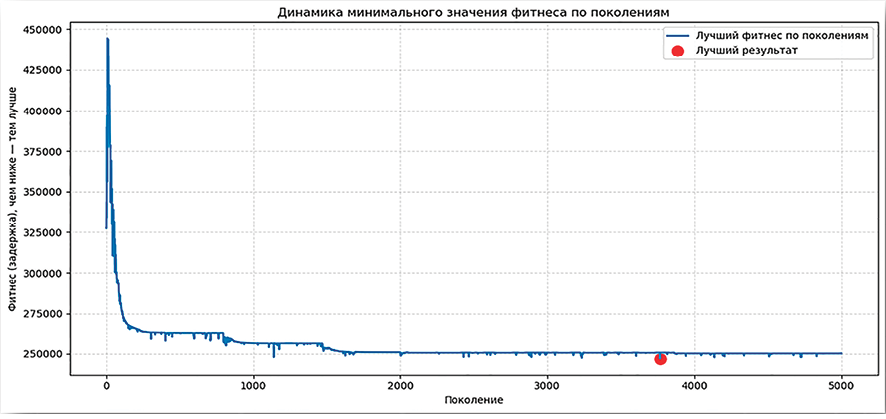
Рис. 1. Динамика минимального значения фитнеса по поколениям Источник: составлено авторами
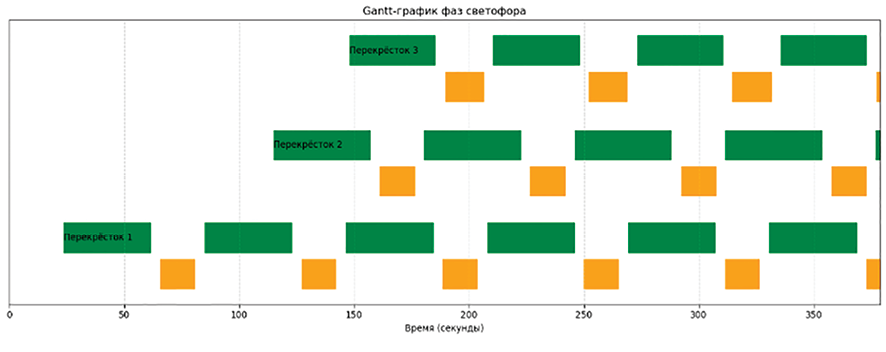
Рис. 2. Gantt-график без зеленой волны Источник: составлено авторами
Все расчеты и визуализация результатов выполняются с использованием библиотек Pandas, NumPy и Matplotlib, что обеспечивает удобную обработку данных и построение графиков изменения значения фитнес-функции по поколениям (рис. 1). Реализация алгоритма учитывает жесткие ограничения ГОСТ на длительность фаз и переходов, а также позволяет масштабировать решение на произвольное число перекрестков.
Результаты исследования и их обсуждение
Проведенные численные эксперименты подтвердили высокую эффективность разработанного генетического алгоритма в оптимизации параметров светофорного регулирования. В базовом сценарии с фиксированным циклом продолжительностью 120 с и жестко заданными фазами (40 с для главного и 20 с для второстепенного направлений) суммарная задержка составляла 778 557 машино-секунд (рис. 2). После 5000 поколений эволюции алгоритм сформировал оптимальное решение, снизив этот показатель на 68,2 % – до 247 184 машино-секунд (рис. 3). Наибольший эффект был достигнут в отношении общественного транспорта: задержки автобусных потоков уменьшились в 3,6 раза (с 44 029 до 12 198 машино-секунд), что стало возможным благодаря внедрению весовой функции, учитывающей приоритетность таких маршрутов. Также удалось сократить среднее время ожидания пешеходов с 100 до 44 с при полном соблюдении требований безопасности. Ключевым преимуществом модели стало жесткое соблюдение нормативов ГОСТ Р 52289-2004, что гарантирует корректность и применимость решений в реальных условиях.
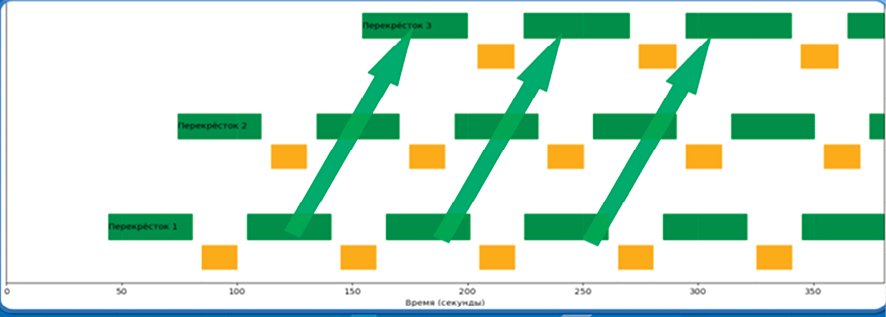
Рис. 3. Gantt-график с зеленой волной Источник: составлено авторами
Разработанная модель может быть интегрирована в действующие транспортные системы с использованием современных программируемых контроллеров, поддерживающих удаленную настройку фаз и циклов. Поддерживаются устройства серий «КД-СВ», «СТАРТ», «АРГУС», а также международные решения, такие как Siemens Sitraffic sX. Передача параметров в контроллер осуществляется через API, таблицы настройки или промежуточное программное обеспечение, что обеспечивает гибкую адаптацию к текущей дорожной обстановке, централизованное обновление и совместимость с внешними сенсорными и видеосистемами. Модель успешно прошла симуляционные испытания и готова к стендовой или пилотной апробации в условиях реальной городской инфраструктуры.
Заключение
Предложенный подход демонстрирует высокую эффективность в интеллектуальном управлении транспортной инфраструктурой. Разработанная модель светофорного регулирования на базе генетического алгоритма позволяет значительно сократить задержки транспорта и повысить приоритет общественного транспорта при строгом соблюдении нормативов. Такое решение может стать основой для создания адаптивных и масштабируемых интеллектуальных систем управления движением в условиях ограниченной городской инфраструктуры.
Conflict of interest
Библиографическая ссылка
Подберёзкин А.А., Борзенков А.М., Волков А.М., Пронин Ц.Б., Остроух А.В. Применение генетического алгоритма для оптимизации светофорного регулирования с учетом нормативных требований и приоритета общественного транспорта // Современные наукоемкие технологии. 2025. № 9. С. 181-185;URL: https://top-technologies.ru/en/article/view?id=40504 (дата обращения: 23.07.2026).
DOI: https://doi.org/10.17513/snt.40504