


Scientific journal
Modern high technologies
ISSN 1812-7320
"Перечень" ВАК
ИФ РИНЦ = 1,279
SITUATIONAL GROUP CONTROL SYSTEMS FOR UNMANNED AERIAL VEHICLES: STATUS AND PROSPECTS

Введение
Характерная черта локальных войн и военных конфликтов первой четверти XXI в. – активное применение противоборствующими сторонами беспилотной авиационной техники. Как показала практика боевых действий на Ближнем Востоке, наиболее сложными для существующих средств беспилотной авиации являются задачи разведки местности и выполнения ударных функций, которые связаны с поиском, распознаванием и огневым поражением малозаметных наземных целей. Перспективным способом успешного решения разведывательно-ударных задач на глубине тактических боевых порядков противника является групповое применение беспилотных летательных аппаратов (БПЛА) малого радиуса действия [1; 2, с. 30–36]. С переходом от одиночного к групповому применению возникли существенные организационные и технические трудности, обусловленные необходимостью координации действий БПЛА, которые совместно выполняют полетное задание в условиях сложной тактической обстановки и радиоэлектронного противодействия [3, 4].
Общая тенденция в развитии средств беспилотной авиации заключается в повышении потенциальных возможностей и тактико-технических характеристик БПЛА и их группировок на основе оптимизации комплекса бортового оборудования и интеллектуализации автоматизированных систем группового управления [5–7]. Перспективным подходом к созданию интеллектуальных систем группового управления БПЛА является использование принципов ситуационного управления сложными техническими системами (СТС) [8, с. 28–31].
Ситуационное управление как новое научное направление сформировалось в 1960–1970-е гг. Значительный вклад в становление ситуационного подхода к управлению СТС внесли советские ученые Л.С. Загадская, Ю.И. Клыков, Д.А. Поспелов, В.Н. Пушкин и др. [9, 10]. Основоположником теории и методологии ситуационного управления по праву считается Д.А. Поспелов, который разработал концепцию ситуационного управления сложными системами [11]. По определению Д.А. Поспелова: «Ситуационное управление – метод управления сложными техническими и организационными системами, основанный на идеях теории искусственного интеллекта, представлении знаний об объекте управления и способах управления им на уровне логико-лингвистических моделей, использовании обучения и обобщения в качестве основных процедур при построении процедур управления по текущим ситуациям, использовании дедуктивных систем для построения многошаговых решений» [12].
Цель исследования – аналитический обзор публикаций, отражающих современное состояние, направления развития и особенности технической реализации положений теории ситуационного управления в системах группового управления БПЛА.
Материалы и методы исследования
Обзор предметной области подготовлен в соответствии с рекомендациями Preferred Reporting Items for Systematic Reviewsand Meta-Analyses (PRISMA). При подготовке литературного обзора авторы руководствовались современными принципами подготовки обзоров [13]. Отбор литературных источников осуществлялся по ключевым словам на основе научных публикаций за последние 35 лет. Публикации для анализа были отобраны на основе автоматизированного поиска в каталогах, реферативных журналах и базах данных ВИНИТИ, eLibrary, Google Scholar и Scopus. Для релевантного поиска материалов использовались следующие ключевые слова одиночно или в комбинации: «беспилотные летательные аппараты», «групповое управление», «ситуационное управление», «адаптивный выбор вариантов». Основанием для включения публикаций в настоящий обзор стали следующие критерии: научный уровень исследования; обоснованность предлагаемых решений; практическая реализуемость и полезность предложений. Критериями исключения публикаций из обзора были: отсутствие доступа к полному тексту статьи; дублирующие исследования; сомнительный электронный ресурс. Всего авторами статьи было проанализировано 86 источников, из которых в работе использовано 28.
Результаты исследования и их обсуждение
Центральным понятием и одновременно объектом ситуационного управления является «текущая ситуация» [11, с. 26]. Эволюция научных представлений о содержании указанного термина нашла отражение в работе А.Б. Филимонова и Н.Б. Филимонова [10]. В современных публикациях текущая ситуация интерпретируется как «совокупность текущего состояния (вектор состояния) объекта и его внешней среды (вектор возмущений)» [9]. Опираясь на рекомендации указанных выше работ, авторы вводят термин «управленческая ситуация», который понимают как формальную модель проблемной области принятия управленческого решения, полученную в результате комплексной оценки и (или) идентификации параметров состояния объекта управления и характеристик внешней среды, отражающую существенные связи между ситуационными переменными с учетом их развития во времени и пространстве. Из приведенного определения следует, что для корректной идентификации управленческой ситуации необходимо соблюдение следующих условий:
1. Модель управленческой ситуации должна содержать конечное количество переменных факторов и однозначно отражать их взаимосвязь в детерминированном или в стохастическом форматах в текущий момент времени.
2. Модель управленческой ситуации должна допускать формализацию в рамках известных математических схем с возможностью определения невязки с эталонной ситуацией по критериям, соответствующим целевой задаче системы управления.
3. При формальном описании управленческой ситуации необходимо учитывать показатели качества (информативность, достоверность, точность, непротиворечивость и др.) результатов наблюдений и полученных данных, формат их представления и темп обновления.
4. Модель управленческой ситуации должна быть пригодна для ситуационного анализа и физической интерпретации в целях выявления вероятных причин ее возникновения и возможных последствий для осуществления процесса управления.
5. Модель управленческой ситуации, представляющая собой отображение проекции пространства управления на гиперповерхность целевых показателей и используемая для ситуационного анализа, должна отвечать свойству марковости (отсутствия последействия);
6. Модель управленческой ситуации должна обладать конечным набором количественных признаков (индикаторов), позволяющих ее классифицировать в некотором классе тактических (управленческих) ситуаций.
Модели ситуационного управления сложными организационно-техническими системами, продолжительное время не находившие практической реализации в силу недостаточной актуальности и отсутствия необходимой вычислительной базы, в настоящее время активно развиваются и внедряются в различных предметных областях: в энергетике [9], в системах управления силами и средствами МЧС [14], в сфере информационной безопасности [15]. В настоящее время идеи ситуационного управления получили новый импульс для развития и оказались востребованными в новой проблемной области – в управлении группами БПЛА [10]. Отметим, что, несмотря на достигнутые успехи в освоении интеллектуальных технологий, принципиальные вопросы построения прикладных моделей и алгоритмов идентификации управленческой ситуации и принятия решений, поддерживающих ситуационное управление группами БПЛА в режиме реального времени, по-прежнему остаются открытыми [16, 17]. Эволюция внешней среды является результатом комплексного воздействия стохастических факторов различной физической природы. В силу этого количественная оценка и идентификация факторов внешней среды с учетом их влияния на управляемость БПЛА представляют собой нетривиальные научно-технические задачи. Отсутствие универсальных методик операционного моделирования и прогнозирования рисков принятых управленческих решений создает дополнительные трудности и во многих случаях ограничивает применение стандартных схем ситуационного управления, ориентированных исключительно на типовые управленческие ситуации.
Логическим следствием успешного освоения новейших достижений в области радиоэлектроники, автоматики и авионики явилось расширение номенклатуры и области эффективного применения БПЛА. Объединение БПЛА в группы при сохранении их автономности и свободы информационного взаимодействия связано с проявлением эффекта эмерджентности, востребованного при решении специальных тактических задач. Большие группы БПЛА, оснащенных автономными средствами навигации, наблюдения, разведки и цифровой обработки, требуют принципиально новых подходов к их управлению. Способ децентрализованного управления обеспечивает возможность масштабирования и снижает (или полностью исключает) уязвимость централизованных пунктов целеуказания и управления. В настоящее время наблюдается рост числа публикаций, отражающих вопросы разработки и анализа характеристик децентрализованных систем управления группами БПЛА.
Большая группа взаимодействующих автономных БПЛА, обладающих возможностью самостоятельного принятия эффективного решения о своем поведении при выполнении общего полетного задания, получила название роя (от англ. swarm). Как известно, обще-принятая концепция роевого интеллекта основана на децентрализованных системах, состоя-щих из однообразных элементов (агентов), взаимодействующих между собой и с окружающей средой для достижения предопределенной цели [7, 16]. Авторы статьи интерпретируют рой БПЛА как конечное множество R=(r1,r2,…,rn) малогабаритных дистанционно управляемых БПЛА, согласованное применение и взаимодействие которых направлено на решение конечного набора априорно известных (заданных) тактических задач P = (p1, p2,…, pc). Обобщенную модель роя как объекта управления представим в виде кортежа [16]
M = (R, H, Y, Q, U, D, P, t),
где H – множество тактико-технических характеристик БПЛА; Y – вектор текущих фазовых координат всех БПЛА; Q – вектор-столбец служебных параметров, определяющих статус (роль) БПЛА в рое (или в группе); U – вектор управляющих воздействий; t – текущее время; D – способ информационного обмена между БПЛА и мобильным пунктом управления.
Рой БПЛА в силу специфических особенностей (динамичность, распределенность в пространстве, неполнота описания, индетерминизм, нестационарность и др.) следует отнести к классу сложных динамических систем [2, с. 443–455]. Отсутствие корректного аналитиче- ского описания роя как объекта ситуационного управления существенно усложняет решение традиционных для классической теории управления задач оценки наблюдаемости, идентифицируемости и управляемости. Особую значимость здесь приобретает проблема выбора методологии синтеза алгоритмов оптимального управления роем БПЛА в условиях нестационарной окружающей среды и наличия дестабилизирующих воздействий различной природы [8, c. 31–36]. Можно предположить, что применение роя БПЛА малого радиуса действия в условиях современного военного конфликта обеспечит повышение вероятности выполнения полетного задания (в установленные сроки) за счет увеличения площади исследуемой территории, сокращения сроков поиска объектов поражения, применения гибкой стратегии атаки и обеспечения высокой живучести ударного ядра роя.
Необходимым условием реализации функционального потенциала роя БПЛА является наличие специализированной системы группового управления. Ее разработка представляет собой сложную научно-техническую задачу, связанную с обоснованием, инженерным синтезом и конструкторской проработкой интеллектуального механизма управления распределенным динамическим объектом. Как показала практика, классическая стратегия автоматизированного управления роем БПЛА с дифференцированием центрального пункта управления в реальных условиях боевых действий является малоэффективной [16, 18, 19]. Более предпочтительной представляется концепция децентрализованного управления роем, в которой интегрируются наиболее продуктивные идеи и принципы современной теории управления, автоматики и робототехники, а обработка измерительной информации и выработка команд управления предусматриваются на борту БПЛА [4, 20, 21]. Данный способ включает в себя три варианта управления группой воздушных роботов (дронов), в основе которых лежат коллективная, стайная и роевая стратегии управления. Платой за достижение автономности и живучести группировки, масштабируемости ее численности и гибкости применения является существенное усложнение алгоритмов координации действий и увеличение стоимости бортовой аппаратуры, которая должна обеспечивать ресурсоемкие вычисления в режиме реального времени. Другой актуальной проблемой управления роем БПЛА является обеспечение устойчивости процесса управления в условиях динамичной тактической и радиоэлектронной обстановки [19].
Обобщая известные публикации в рассматриваемой предметной области, авторы выделяют следующие особенности роевого управления с позиций теории управления:
− использование нескольких уровней управления с разными приоритетами;
− вариативность формального описания роя, определяемая содержанием и условиями выполнения полетного задания;
− асинхронный характер процесса информационного обмена между дронами;
− расширение функционала и компонентного состава бортового оборудования;
− необходимость управления информационными потоками внутри группы;
− зависимость структуры общего целевого показателя роя БПЛА и значений его компонентов (частных показателей эффективности отдельных дронов) от содержания полетного задания, этапа операции и от сложившейся тактической ситуации;
− отсутствие стандартных алгоритмов контроля взаимодействий дронов в группе.
В общем случае рой БПЛА как сложный объект управления не имеет замкнутого аналитического описания в силу динамического характера, индетерминизма и распределенности, а также из-за отсутствия формализма для декомпозиции взаимосвязанных информационных подпроцессов и управленческих функций. Эти факторы существенно затрудняют корректную математическую постановку и формализованное решение частных задач управления роем. В ряде работ для управления большими группами (роем) БПЛА предлагается использовать методы роевого интеллекта [7, 16]. В этом отношении представляет практический интерес класс централизованных иерархических стратегий управления, в которых связь с центральным пунктом управления есть лишь у ведущих БПЛА, каждый из которых передает команды аппаратам своей подгруппы. Для оптимизации информационного обмена и принятия решений в группах БПЛА предлагается использовать алгоритмы муравьиной и пчелиной колоний. На основе принципов типизации, унификации и экспериментального тестирования известных алгоритмов роевого интеллекта могут быть получены универсальные вычислительные алгоритмы, позволяющие организовать эффективное роевое взаимодействие в группе дронов [7, 22].
Современным требованиям к риску выполнения полетного задания в наибольшей степени отвечают распределенные интеллектуальные системы управления роем БПЛА [4]. При этом с ростом сложности решаемых задач возрастает потребность в разработке прикладных методов и средств, направленных на обработку больших объемов измерительной информации и стабилизацию характеристик системы управления. В одной из работ на основе теории мультиагентных систем предложена распределенная сетецентрическая система управления группой БПЛА, позволяющая организовывать их координированные действия в автономном режиме [18]. При обосновании структуры указанной системы и разработке алгоритма координации взаимодействия БПЛА использовались методы системного анализа. Для синтеза показателя эффективности координированных действий БПЛА авторы указанной работы применили метод анализа иерархий и методы линейного программирования, а для оценки эффективности алгоритма координации действий БПЛА в различных ситуациях – метод имитационного моделирования. В ряде работ исследуются различные аспекты применения мультиагентных технологий в перспективных системах группового управления БПЛА [20, 21]. К.С. Амелин и Е.И. Антал предложили вариант адаптивной системы управления группой БПЛА, которая основана на автономном общении агентов через радиосигнал [21]. Утверждается, что свойство адаптивности позволит группе дронов оперативно принимать эффективные решения по изменению сценария выполнения поставленной тактической задачи.
В последние годы появился ряд публикаций, в которых для оптимизации, адаптации и настройки базовых моделей и схем группового управления БПЛА используются эволюционные алгоритмы. В одной из статей с помощью специализированного программного стенда решена задача имитационного моделирования операции с участием двух противоборствующих группировок БПЛА [22]. Для оптимизации функции полезности, отражающей интегральный эффект совместных действий выделенной группы БПЛА, успешно применен генетический алгоритм. В процессе исследования авторами указанной статьи синтезированы компоненты гибкой стратегии управления и апробирована разработанная модель конкурентного обучения алгоритмов управления на основе эволюционного отбора.
Проблемным вопросом при децентрализованном управлении является техническая реализация процесса информационного обмена в группе БПЛА. По оценке экспертов, в качестве перспективного способа обеспечения устойчивости системы управления роем дронов может рассматриваться технология блокчейн (от англ. blockchain). В исследованиях И.А. Глазырина показано, что переход к известной технологии способен обеспечить надежный информационный обмен между отдельными БПЛА в составе роя [23]. Принимая во внимание высокие потенциальные возможности блокчейн-технологии и ее перспективы как платформы для группового управления БПЛА, отметим, что ряд технических вопросов, связанных с применением технологии блокчейн в избранной предметной области, остаются еще нерешенными.
Таким образом, при разработке автоматизированных и роботизированных систем группового управления БПЛА получили применение три базовых методических подхода, основу которых составляют соответственно методы современной теории управления, методы теории принятия решений и искусственного интеллекта. В перспективных конструкторских решениях можно обнаружить признаки интеграции средств трех указанных подходов. С учетом последних достижений в развитии элементной базы авионики новые возможности открываются для освоения нейросетевых моделей и алгоритмов эмерджентного интеллекта, реализующих гибкую стратегию децентрализованного управления состоянием группы БПЛА.
Для координации совместных действий БПЛА система управления роем должна обладать способностью обучаться и адаптироваться к любой тактической и фоновой обстановке. Общая задача ситуационного управления роем БПЛА имеет множество вариантов математической постановки и практической реализации [2, с. 470–480]. Например, в работе Н.Р. Халимова и А.В. Мефедова при исследовании характеристик системы группового управления БПЛА в составе имитационной модели рассматриваются различные алгоритмы реализации задачи целераспределения [18]. В работе Т.З. Муслимова с позиций системного подхода исследуется задача флокирования (от англ. flocking), которая понимается как децентрализованное формирование и поддержание группой автономных БПЛА заданной геометрической формы строя с целью эффективного выполнения сложного полетного задания [24]. При разработке алгоритмов решения задачи флокирования автором указанной статьи применен метод неоднородного векторного поля.
Проведенный обзор литературы позволил выделить общие принципы ситуационного подхода к управлению, которые заключаются в следующем.
1. Не существует универсального подхода к реализации концепции ситуационного группового управления БПЛА. Оперативная обстановка, тактико-технические характеристики БПЛА и специфика полетного задания определяют многообразие и уникальность управленческих ситуаций. Разные проблемные ситуации требуют различных подходов к их разрешению. Реализуемый в системах ситуационного управления (ССУ) механизм (модели, алгоритмы и процедуры) должен быть наделен свойствами обучения и адаптации.
2. Основу функционала ССУ составляют алгоритмы интеллектуального анализа данных, в том числе: процедуры идентификации, распознавания и классификации, анализа и интерпретации управленческой ситуации через цифровую обработку результатов измерений, полученных по нескольким информационным каналам.
3. Принципиальным вопросом при идентификации управленческой ситуации является определение значимости факторов и их взаимосвязи; для выбора управленческого решения применительно к конкретной ситуации важны количественные оценки рисков, полученные по результатам прогнозов и анализа последствий принятых управленческих решений. Ситуационные вероятностные факторы должны учитываться в стратегиях, структурах и процессах.
4. Результативность ситуационного подхода к групповому управлению зависит от качества формального описания и идентификации существенных свойств объекта управления и характеристик взаимодействия между факторами внешней и внутренней среды.
6. Для получения однозначных результатов в условиях нетривиальности задачи управления и уникальности набора управленческих ситуаций необходим единый подход к оценке целевых показателей через анализ индикаторов качества текущего управления.
7. Для осуществления технологии ситуационного анализа полезной может оказаться процедура сравнения модели управленческой ситуации с некоторым эталоном из состава обновляемого каталога априорно созданных паттернов.
8. Механизм формирования команд управления по результатам выбора оптимальной стратегии управления должен формироваться в реальном масштабе времени.
Теоретическую платформу разработки реальной ССУ, которая относится к классу СТС, должны составлять методология системного подхода, базовые положения и рекомендации системного анализа. В отдельных задачах исследования и проектирования компонентов ССУ могут использоваться ситуационный анализ, факторный анализ, когнитивный анализ, генетический анализ, экспертно-аналитический метод, методы аналогий, морфологического анализа и декомпозиции, методы имитационного моделирования, теории игр. Среди указанных подходов доминирует метод ситуационного анализа, который представляет собой комплексную технологию подготовки, принятия и реализации управленческого решения, в основе которой лежит анализ отдельно взятой управленческой ситуации. Технология ситуационного анализа предполагает выделение типичных ситуаций во внешней среде и объединение этих ситуаций в блоки на основе сходных стратегий и действий. При таком подходе главная задача состоит в распознавании управленческой ситуации, ее идентификации, сравнении с эталонной ситуацией и прогнозировании сценария развития событий.
Одной из тенденций в области ситуационного управления сложными динамическими объектами является разработка методов инженерного синтеза ССУ на основе интеграции процессов событийного моделирования и нечеткого ситуационного управления. Разработки в данном направлении ориентированы на более полный учет специфики предметной области в условиях неполноты текущей информации и разнокачественных данных о состоянии и функционировании СТС. Известные в отечественной литературе методики отличаются сочетанием возможностей аналитического, нейросетевого и нечеткого подходов к построению гибридных моделей СТС, позволяющих осуществлять адаптацию к изменениям системных и внешних факторов.
В работе В.В. Инсарова, С.В. Тихоновой, С.А. Дронского рассматривается концепция построения интеллектуальной системы управления автономными БПЛА, реализующей в процессе полета функцию ситуационной осведомленности [5]. В качестве ключевых компонентов такой системы выделены наземная система подготовки полетных заданий и бортовая система технического зрения.
В статье А.А. Хановой, Н.С. Уразалиева, З.А. Усманова применительно к ССУ предложен алгоритм формирования и выбора вариантов управленческих решений, включающий определение проблемной ситуации по набору показателей сбалансированной системы показателей через сравнительный анализ подобных ситуаций во множестве типовых ситуаций [25]. Разработан подход к анализу и оценке нечеткой ситуации в сложной системе на основании отклонения значений показателей сбалансированной системы показателей от нормы путем описания ситуации через лингвистические переменные. В одной из работ предложен прикладной метод нечеткого ситуативного управления СТС на основе композиционных гибридных моделей, заключающийся в применении нечеткой ситуативно управляющей сети для идентификации текущих ситуаций, поиска и выбора последовательностей управляющих решений при переводе системы в целевые ситуации с учетом стратегии управления и ограничений [26]. Указанный метод использует интеграцию композиционного моделирования и нечеткого ситуативного управления и обладает значительным потенциалом для повышения эффективности управления СТС в условиях неопределенности внешней среды. Одновременно отметим, что применимость указанного подхода к управлению группировкой БПЛА лимитируется трудоемкостью процесса построения и адаптации нечеткой ситуативно-управляющей сети.
Ранние исследования Е.Н. Надеждина показали, что современным требованиям к гибкости и устойчивости ССУ наиболее полно отвечает концепция адаптивного дискретного управления, которая реализуется по трехступенчатой базовой схеме «ситуация – стратегия управления – действие» (С-СУ-Д) [17]. При этом основу каркаса ССУ может составить известная методология адаптивного выбора вариантов (АВВ) [27, с. 25–39]. В одной из работ Е.Н. Надеждина с использованием рекомендаций АВВ обоснована концептуальная модель комбинированного роевого управления, в которой взаимодействие дронов в составе роя осуществляется через мобильный пункт управления, размещенный на ведущем БПЛА [16]. В состав системы группового управления введены подсистема автоматизированного и подсистема автоматического управления. Показано, что для стохастического моделирования, анализа и синтеза алгоритмов группового управления в этом случае может быть применен математический аппарат управляемой цепи Маркова. В другой статье Е.Н. Надеждина раскрыта типовая структура ССУ как распределенной динамической системы с адаптивным дискретным управлением и выделены ее ключевые функциональные компоненты [15]. В терминах теории АВВ обоснована формальная модель рекуррентного алгоритма адаптивного управления динамическим объектом, представленным в виде регулярной марковской цепи. Показано, что предложенный алгоритм может быть применен для автоматического выбора субоптимального (в смысле минимума интегрального риска) вектора управления, адекватного текущей управленческой ситуации.
Продолжая исследования, представленные в ранее опубликованных авторских работах, определим функционал прототипа ССУ группой БПЛА [15–17]. Для этого воспользуемся рекомендациями известной технологии функционального моделирования информационных систем на основе диаграмм IDEF0 [28, с. 12].
На рис. 1 представлена контекстная диаграмма функциональной модели ССУ группой БПЛА, построенная в терминах технологии функционального моделирования IDEF0.
Для осуществления механизма формирования команды управления на очередном k-м интервале времени tk ∈ (t0, tN) необходимы следующие категории исходных данных (рис. 1):
1) полетное задание, представленное в формализованном виде;
2) характеристики (внешней) среды, содержащие параметры атмосферы и статистические характеристики помех и возмущающих воздействий;
3) текущие координаты дронов, включая декартовы координаты центра масс в нормальной земной системе координат и угловые параметры (угол рыскания, угол тангажа и угол крена), а также их производные.
На выходе ССУ формируется команда управления, включающая вектор управления u = (u1, …, um)T и служебные компоненты g = (g1, …, gm)T, которые определяют специфику операционных действий конкретных дронов.
Для формирования команды управления в контуре ССУ привлекаются вычислительные и программные ресурсы бортовой системы управления ведущего БПЛА группы, а также компоненты ее математического обеспечения (модели, аналитические соотношения, служебные параметры и константы), определяющие принятый закон ситуационного управления. В интересах обеспечения технической реализуемости алгоритмов группового управления в ССУ используются дисциплинирующие условия, учитывающие операционные и технические ограничения.
На рис. 2 представлена функциональная модель ССУ в виде диаграммы IDEF0 1-го уровня, которая является результатом декомпозиции контекстной диаграммы (рис. 1).
В общем случае ССУ должна выполнять следующие функции (рис. 2):
1) предобработка измерительной информации, включающая ее нормализацию и преобразование ее к унифицированному формату, используемому для последующей цифровой обработки; на практике используют различные каналы получения измерительной информации: инерциальные навигационные системы, приемники сигналов спутниковой навигационной системы, сенсорные датчики и радары, работающие в различных диапазонах спектра электромагнитного излучения; для минимизации погрешности оценки текущего состояния (объекта) и обеспечения требуемого уровня помехозащищенности используются схемы комплексирования измерительных каналов на базе бортового процессора;
2) прогностическая оценка стохастических факторов внутренней и внешней среды с учетом существенных связей между ними;
3) идентификация текущей ситуации в рамках принятой математической схемы;
4) классификация управленческой ситуации с привлечением специальных моделей, вычислительных алгоритмов и программных процедур;
5) генерация альтернатив (множества стратегий управления) на основе анализа, представления, обработки и интерпретации знаний предметной области; формирование базы знаний (предметной области) предусматривается на этапе настройки бортовой аппаратуры в стационарных условиях пункта базирования БПЛА; для этого привлекается группа экспертов и системных аналитиков;
6) выбор (оптимальной) стратегии управления на конечном множестве альтернатив (вариантов) в соответствии с заданным алгоритмом выбора и, соответственно, формирование команды управления в виде совокупности вектора управления и служебных компонент.

Рис. 1. Контекстная диаграмма функциональной модели системы ситуационного управления на основе технологии IDEF0 (разработано авторами)
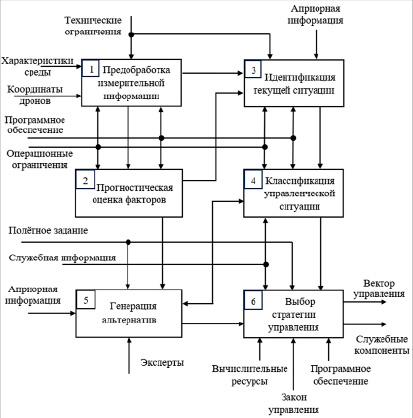
Рис. 2. Функциональная модель системы ситуационного управления на основе технологии IDEF0 Источник: разработано авторами
Основные трудности при создании реальных ССУ вызывают вопросы идентификации и распознавания управленческих ситуаций и синтеза алгоритма формирования управляющей команды, соответствующей полученной модели управленческой ситуации. Существующие алгоритмические подходы к решению указанных вопросов нашли отражение в литературе.
Для решения задач распознавания управленческих ситуаций и автоматической генерации управляющих решений в составе бортовой компоненты распределенной системы интеллектуального управления группой БПЛА могут быть применены эффективные вычислительные алгоритмы, построенные на основе рекомендаций классической теории управления и численных методов оптимизации. Подобный подход нашел отражение в работе [4].
Обобщая результаты обзора известных публикаций, выделим наиболее перспективные подходы к разработке механизма распознавания тактических ситуаций:
1) алгоритмы на основе численного решения специальных экстремальных задач;
2) применение продукционных моделей с нечеткой логикой;
3) использование нечетких нейросетевых классификаторов;
4) алгоритмы кластеризации с элементами машинного обучения;
5) алгоритмы управления типа «ситуация – действие», основанные на прецедентах;
6) алгоритмы принятия решений на основе многозначной логики.
Представленная в настоящей статье функциональная модель в виде IDEF0-диаграмм (рис. 1 и 2) в общем виде отражает функционал прототипа ССУ, реализующей концептуальную схему «ситуация – стратегия управления – действие».
Механизм ситуационного управления, построенный по указанной схеме, обладает повышенной гибкостью и отвечает задаче обеспечения гарантированного выполнения полетного задания группой БПЛА в условиях статистической неопределенности относительно внешней среды. Для реализации вычислительных алгоритмов и процедур обработки данных, поддерживающих указанное расширение функционала ССУ, могут быть привлечены вычислительные мощности бортовых процессоров нескольких БПЛА из состава группы. Одновременно отметим, что вопросы обоснования и цифровой реализации алгоритмов идентификации управленческих ситуаций и рекуррентных алгоритмов выбора оптимальной стратегии управления, которая адекватна полученной модели управленческой ситуации, окончательно не решены и требуют дополнительных прикладных исследований с учетом реальных дисциплинирующих условий и технологических ограничений.
Выводы
1. Анализ и обобщение накопленного опыта отечественных исследований дают основание рассматривать концепцию ситуационного управления как перспективную применительно к задачам группового управления БПЛА специального назначения.
2. Для преодоления проблем, обусловленных влиянием на процесс управления и на пространственное движение БПЛА множества факторов различной природы, в контуре ССУ необходимо предусмотреть блоки идентификации управленческой ситуации, генерации альтернатив и выбора (или корректировки) адекватной (управленческой ситуации) стратегии управления. Предлагается расширить состав функциональных компонентов ССУ за счет включения в ее состав дополнительных блоков, осуществляющих технологию синтеза предпочтительной стратегии на конечном множестве альтернативных вариантов.
3. В основание концепции перспективной системы ситуационного группового управления должны быть положены следующие алгоритмы: 1) идентификации управленческой ситуации; 2) классификации и сравнения с эталоном по совокупности показателей; 3) генерации альтернатив; 4) выбора оптимальной (в смысле заданного критерия) стратегии управления на конечном множестве альтернатив.
4. Перспективной теоретической платформой для цифровой реализации концепции системы ситуационного управления может стать технология адаптивного выбора вариантов, предполагающая пошаговое использование рекуррентного вычислительного алгоритма для выбора оптимальной стратегии на каждом такте управления группой БПЛА.
Библиографическая ссылка
Надеждин Е.Н., Котова И.Ф., Глущенко В.Е. СИСТЕМЫ СИТУАЦИОННОГО ГРУППОВОГО УПРАВЛЕНИЯ БЕСПИЛОТНЫМИ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ: СОСТОЯНИЕ И ПЕРСПЕКТИВЫ // Современные наукоемкие технологии. 2024. № 12. С. 252-262;URL: https://top-technologies.ru/en/article/view?id=40272 (дата обращения: 24.07.2026).
DOI: https://doi.org/10.17513/snt.40272