


Scientific journal
Modern high technologies
ISSN 1812-7320
"Перечень" ВАК
ИФ РИНЦ = 1,279
ALGORITHM FOR IMPROVING SPATIO-TEMPORAL MOTION DETECTION METHODS

Введение
Задача распознавания движения на видео заключается в создании алгоритмов, которые могут обнаруживать движение на видео и предоставлять информацию об этом движении в какой-либо форме, удобной для дальнейших шагов обработки видео. Алгоритмы, решающие такую задачу, классифицируются на две группы: пиксельные [1] и блочные [2]. Пиксельные алгоритмы основаны на анализе каждого пикселя в кадре видео. Они потребляют меньше ресурсов в процессе работы и более просты в реализации, однако менее точны и подвержены влиянию различных негативных факторов. Блочные алгоритмы работают уже с группами пикселей вместо отдельных точек и извлекают из них определенные текстурные характеристики для дальнейшей обработки. Такие методы выдают более качественные результаты, но они более ресурсоемкие и не всегда подходят для обработки в режиме реального времени.
Целью исследования является разработка универсального метода распознавания движения, комбинирующего пиксельный и блочный подходы и способного выдавать приемлемые результаты распознавания при малом потреблении вычислительных ресурсов.
В настоящий момент разработано множество пиксельных и блочных методов, большинство из которых опираются на уже проработанные фундаментальные алгоритмы, модифицируя их под определенные ситуации или объединяя их с прочими улучшениями для достижения наилучшего результата [3].
Наиболее распространенными пиксельными алгоритмами являются методики извлечения фона, такие как смесь гауссианов (GMM) с различными улучшениями [4], ядерная оценка плотности (KDE) [5], медианный фильтр [6], алгоритмы Vibe и Vibe+ [7] и др. Эти методы хороши для использования в режиме реального времени, но иногда приводят к большому количеству ложных срабатываний.
В области применения блочных алгоритмов в настоящий момент достаточно распространена группа методов с применением локальных бинарных шаблонов (LBP). В работе [8] авторы успешно построили статическую модель фона на основе алгоритмов самоподобия (LSS-дескрипторы) и применяли специальную метрику для классификации пиксельных блоков. На этапе постобработки использовались информация о цвете и морфологические операции для уточнения границ модели.
В работе [9] был предложен новый алгоритм, который классифицирует все пиксели на несколько кластеров на основе сходства их изменений яркости и затем для каждого кластера определяет, чем были вызваны изменения. Изменения освещенности показывают схожие изменения яркости, и алгоритм использует эту информацию для фильтрации срабатываний.
В исследовании [10] проведен сравнительный обзор алгоритмов с применением локальных бинарных шаблонов для обработки обычных изображений. Авторы представили описания различных вариантов реализации LBP-дескрипторов и проанализировали некоторые современные технологии по применяемым алгоритмам и решаемым проблемам.
В целом, вышеуказанные алгоритмы на основе локальных бинарных шаблонов решают достаточно узкие проблемы либо имеют неудовлетворительные показатели по быстродействию по сравнению с пиксельными алгоритмами, что открывает области для исследования данной проблемы.
Материалы и методы исследования
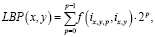
Стандартный подход расчета LBP-дескриптора представлен в формуле (1):
 (1)
(1)
где ix,y – рассматриваемый пиксель (обычно центральный), ix,y,p – p-й сосед центрального пикселя, f(ip, i) – функция сравнения пикселей, возвращающая 0 или 1 при различных условиях. В данном исследовании в качестве функции сравнения предлагается использовать признак «похожести» пикселей в совокупности с заменой абсолютного порога в традиционном подходе на относительный, который зависит от интенсивности центрального пикселя i. Это позволяет улучшить работу дескриптора в большинстве случаев изменения освещения. Для этого достаточно определить функцию, как указано в формуле (2):
 , (2)
, (2)
где Trel – коэффициент относительного порогового значения.
Еще проблемой LBP-дескрипторов является их неустойчивость к шуму. Для подавления такой проблемы обычно используют методы сглаживания. В данном исследовании предлагается использовать фильтр Кувахара – это нелинейный оператор для сглаживания изображений, особенностью которого является сохранение границ объектов [11]. Отметим, что такой фильтр добавляет на изображения эффект мультипликационного фильма, создается ощущение, что кадр грубо нарисован красками. Такой эффект усиливается с увеличением количества повторений или увеличением размеров окна фильтра. При сильном сглаживании теряются детали на изображении, что в некоторых сценариях довольно критично. Вследствие этого фильтр Кувахара имеет ограниченную область применения, однако он как нельзя лучше подходит к задаче распознавания движения, поскольку маска объектов переднего плана не требовательна к наличию деталей изображения, но требует сохранения границ для более точной сегментации.
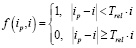
Однако даже с приведенными изменениями полагаться исключительно на локальные бинарные шаблоны не всегда оправдано, поскольку такие вычисления нередко приводят к ложным срабатываниям. На рисунке 1 представлен пример работы алгоритма при расчете LBP-дескриптора в отдельном блоке.
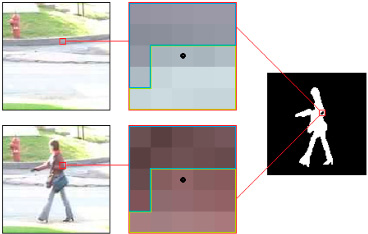
Рис. 1. Пример формирования одинаковых значений LBP-дескрипторов для фона и объекта переднего плана: сверху слева – фоновая модель, слева снизу – текущий кадр, в центре сверху – окно LBP-дескриптора для красного блока в фоновой модели, в центре снизу – окно LBP-дескриптора для соответствующего блока текущего кадра, справа – результат распознавания
Синие зоны на рисунке 1 объединяют пиксели, которые существенно отличаются от центральных пикселей (помечены черной точкой), зеленые зоны соответствуют «похожим» пикселям. При сравнении заметно, что значения LBP-дескрипторов в этой зоне будут одинаковыми, что приводит к неправильной классификации зоны на маске движения в правой части рисунка – алгоритм будет ложно классифицировать части перемещающегося объекта как фоновые, что неверно, поскольку в текущем кадре представлен двигающийся объект. Это объясняется тем, что текстурные характеристики блоков (связи между пикселями) совпадают.
Этот пример доказывает, что полагаться только на LBP-дескрипторы нежелательно, поэтому в данном исследовании предлагается объединить блочный подход со стандартными пиксельными методиками извлечения фона. Это позволит использовать преимущества обработки локального контекста пикселей при расчетах LBP-дескрипторов с дополнительными точечными проверками для фильтрации ложных срабатываний.
На рисунке 2 представлена блок-схема предлагаемого алгоритма.
Далее представлен псевдокод части алгоритма, отмеченный на рисунке 2 пунктирной линией:
|
1: function isPixelForeground(px,y) 2: TotalDescriptorDistance = 0 3: TotalIntensityDistance = 0 4: for i = 1 to TotalChannelsNumber do 5: DescriptorDistance = HammingDistance(Descriptor(px,y,c, i), Descriptor(px,y, i) 6: If DescriptorDistance ≥ Tdesc ∙ Intensity(px,y,c, i) ∙ alpha 7: return true 8: IntensityDistance = Difference(Intensity(px,y,c, i), Intensity(px,y, i)) 9: If IntensityDistance > Tint ∙ alpha 10: return true 11: TotalDescriptorDistance += DescriptorDistance 12: TotalIntensityDistance += IntensityDistance 13: end for 14: return TotalDescriptorDistance > Tdesc ∙ Intensity(px,y,c, i) or TotalIntensityDistance > Tint |
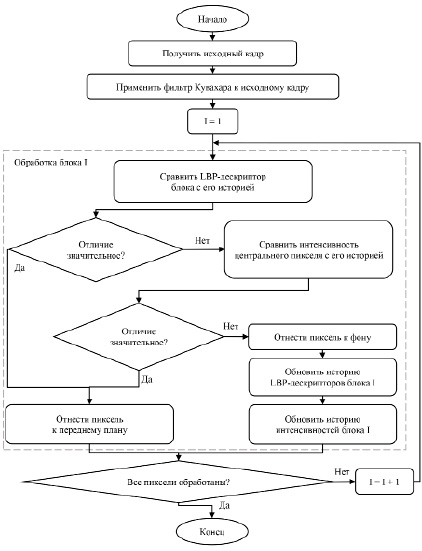
Рис. 2. Блок-схема предлагаемого алгоритма
Данный блок описывает упрощенное обнаружение изменений для сегментации изображения с дополнительной проверкой интенсивности.
Переменная TotalChannelsNumber – это количество цветовых каналов в кадре (3 для RGB формата); Difference – абстрактная функция определения разности между пикселями (может быть взят любой алгоритм вычитания фона в качестве реализации); Descriptor – функция вычисления значения дескриптора (формулы 1, 5); HammingDistance – функция вычисления расстояния Хэмминга.
Псевдокод описывает принятие решений при классификации рассматриваемого пикселя на основе блочной и пиксельной информации. Экономия вычислений происходит при использовании поканального сравнения – если изменения по одному из каналов в какой-то момент уже становятся существенными, дальнейшие сравнения отменяются, а пиксель относится к объекту переднего плана. Разбиение вычислений по каналам в первую очередь направлено на ускорение обработки, однако на практике выяснилось, что с помощью такого подхода алгоритм может обнаруживать незначительные изменения в рамках одного канала (например, когда темный объект перекрывается темно-синим).
В качестве алгоритма вычитания фона в этом исследовании был взят медианный фильтр, однако в зависимости от особенностей задачи и требований к производительности может быть использован любой алгоритм вычитания фона, который возвращает разность между пикселями.
Результаты исследования и их обсуждение
При тестировании разработанного алгоритма использовались наборы данных, которые были получены из видеоколлекций открытой онлайн базы данных Change Detection 2014 [12]. Каждая видеозапись из этого набора уже разбита на видеокадры и вручную сегментирована для удобства сравнения ожидаемого и актуального результатов работы алгоритма. Всего было использовано 10 видеопоследовательностей из 5 различных категорий сцен, каждая из которых имеет свои проблемы и сложности. Метод тестировался на следующем универсальном наборе параметров:
‒ Tdesc = 12: суммарное пороговое значение для побитового сравнения значений LBP-дескрипторов на предмет обнаружения «похожести» (не имеет значения, в каких конкретно пикселях имеются различия, важно лишь общее количество несовпадений в области);
‒ Tint = 75: суммарное пороговое значение для сравнения интенсивностей пикселей по всем цветовым каналам;
‒ N = 15: размер буфера исторической информации – количество дескрипторов и интенсивностей цвета, хранящихся в виде выборок для каждого пикселя в опорной модели;
‒ α = 0,5: пороговый поправочный коэффициент, применяемый к Tdesc и Tint для поканального сравнения;
‒ Trel = 0,365: коэффициент относительного порога LBP-дескриптора.
Примеры работы алгоритма для некоторых видеозаписей показаны на рисунке 3.
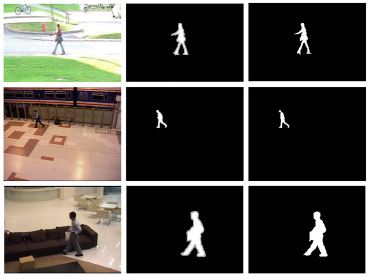
Рис. 3. Результаты работы предложенного метода: слева – оригинальные кадры; в центре – идеальные результаты распознавания, приближенные к реальности; справа – результаты работы алгоритма
Таблица 1
Показатели точности распознавания предлагаемого алгоритма
|
Категория видеозаписей |
Prc |
Rcl |
PCC |
F-балл |
|
PETS 2006 |
0,84 |
0,89 |
99,2 |
0,86 |
|
Обычные видеозаписи |
0,83 |
0,86 |
99,1 |
0,84 |
|
Динамический фон |
0,66 |
0,70 |
96,9 |
0,68 |
|
Прерывистое движение объектов |
0,79 |
0,79 |
98,3 |
0,79 |
|
Тень |
0,76 |
0,76 |
96,6 |
0,76 |
|
Итого |
0,78 |
0,80 |
98,0 |
0,79 |
Таблица 2
Показатели точности распознавания современных методов извлечения фона
|
Метод |
Prc |
Rcl |
PCC |
F-балл |
|
Предлагаемый |
0,78 |
0,80 |
98,0 |
0,79 |
|
ViBe+ |
0,67 |
0,81 |
98,9 |
0,73 |
|
ViBe |
0,66 |
0,71 |
98,2 |
0,68 |
|
KDE |
0,68 |
0,65 |
96,5 |
0,67 |
|
GMM |
0,65 |
0,63 |
95,6 |
0,64 |
|
Медианный фильтр |
0,59 |
0,47 |
91,2 |
0,52 |
Для оценки точности алгоритма учитывались распространенные показатели компьютерного зрения: точность (Prc), чувствительность (Rcl), процент корректных классификаций (PCC) и F-балл [3, 13]. В таблице 1 представлена полная информация о характеристиках предлагаемого алгоритма применительно ко всем пяти категориям видеопоследовательностей наряду с усредненными итоговыми значениями.
Наилучшие значения наблюдаются в категориях «PETS 2006» и «Обычные видеозаписи», что объясняется стабильностью фона и простотой моделирования сцен в этих видеозаписях. Наихудшие показатели алгоритм продемонстрировал на видеозаписях категории «Динамический фон». Видеозаписи из этой группы содержат колебания фона, что приводит к большому числу ложных срабатываний. Однако именно для этой категории применение фильтра Кувахара показало наилучший прирост качества распознавания.
На практике выяснилось, что применение только одного из предложенных улучшений (фильтр Кувахара, относительное пороговое значение, дополнительные пиксельные проверки) сказывается на общей эффективности алгоритма незначительно и иногда даже ухудшает показатели для некоторых видеозаписей, поэтому рекомендуется использовать все улучшения одновременно. Например, при связке фильтра Кувахара с LBP-дескрипторами успешно обрабатываются проблемы теней и изменения освещения, когда соответствующие зоны в кадре изменяются равномерно. Относительность значений интенсивностей между соседними пикселями в таких блоках сохраняется, поэтому медленные и нерезкие изменения фона между кадрами успешно отфильтровываются, не приводя к ложным срабатываниям.
В таблице 2 представлено сравнение показателей точности распознавания предлагаемого метода с основными современными методиками для решения подобных задач применительно к тем же наборам видеозаписей. Данные в таблице 2 отсортированы по убыванию F-балла.
В таблице 3 продемонстрировано сравнение тех же алгоритмов по потреблению вычислительных ресурсов на основе двух показателей: по среднему количеству обработанных в секунду кадров (FPS) и по среднему потреблению оперативной памяти в МБ. Каждая строчка таблицы 3 соответствует одной из рассмотренных видеопоследовательностей.
Согласно результатам, представленным в таблицах 2 и 3, в среднем предлагаемый метод отрабатывает лучше, чем другие современные алгоритмы по большинству показателей точности, и демонстрирует хорошее качество распознавания.
Таблица 3
Показатели потребления вычислительных ресурсов современных методов извлечения фона
|
№ |
Предлагаемый |
Vibe+ |
Vibe |
KDE |
GMM |
Медианный фильтр |
||||||
|
FPS |
Память |
FPS |
Память |
FPS |
Память |
FPS |
Память |
FPS |
Память |
FPS |
Память |
|
|
1 |
29,3 |
416 |
34,2 |
309 |
38,4 |
215 |
47,0 |
350 |
60,1 |
52 |
67,2 |
47 |
|
2 |
44,0 |
89 |
50,7 |
42 |
56,3 |
25 |
60,4 |
67 |
80,2 |
13 |
90,2 |
9 |
|
3 |
51,3 |
92 |
55,7 |
48 |
61,4 |
51 |
65,1 |
81 |
82,4 |
19 |
93,3 |
13 |
|
4 |
44,7 |
40 |
59,4 |
47 |
62,2 |
35 |
71,8 |
78 |
81,7 |
17 |
92,3 |
14 |
|
5 |
29,0 |
364 |
35,0 |
105 |
40,4 |
115 |
51,2 |
292 |
67,1 |
35 |
70,3 |
27 |
|
6 |
45,7 |
38 |
61,1 |
30 |
63,7 |
24 |
71,2 |
85 |
78,4 |
16 |
85,4 |
10 |
|
7 |
44,4 |
149 |
51,2 |
86 |
48,8 |
88 |
55,4 |
113 |
71,2 |
24 |
75,3 |
19 |
|
8 |
48,2 |
39 |
62,7 |
36 |
60,7 |
25 |
74,3 |
92 |
82,6 |
11 |
92,2 |
9 |
|
9 |
42,5 |
41 |
52,4 |
39 |
61,8 |
26 |
66,6 |
74 |
81,1 |
13 |
93,1 |
8 |
|
10 |
42,5 |
43 |
50,3 |
36 |
57,3 |
25 |
68,4 |
82 |
81,6 |
14 |
92,1 |
9 |
Однако качество работы компенсируется скоростью – в среднем, алгоритм работает немного медленнее аналогов и потребляет больше памяти из-за введения дополнительных шагов по фильтрации и операциям сравнения, а также ведения дополнительной истории LBP-дескрипторов. Более подробно результаты тестирования представлены в протоколах испытаний в репозитории GitHub [14].
Заключение
В этой статье был представлен новый эффективный метод улучшения пространственно-временных алгоритмов вычитания фона, который позволяет существенно повысить качество распознавания при сравнительно небольших вычислительных затратах. Улучшение основано на одновременном применении нескольких модификаций.
Во-первых, это введение фильтра Кувахара в качестве первого этапа предварительной обработки видеокадров, что позволяет сглаживать изображения с одновременным сохранением границ. Потеря мелких деталей вследствие подобной фильтрации практически не оказывает влияния на итоговую сегментацию объектов переднего плана. Напротив, особенности такого фильтра добавляют на изображение «эффект рисунка», тем самым равномерно закрашивая однородные области, без размытия контуров объектов, что позволяет сохранить локальную контекстную информацию, используемую на последующих шагах.
Во-вторых, это введение локальных бинарных шаблонов в алгоритм распознавания, что позволяет учитывать пространственные связи между соседними пикселями. В данном исследовании вместо стандартного подхода с разностью интенсивностей пикселей использовались двоичные дескрипторы подобия, определяющие степень «похожести» блоков друг на друга. Дополнительно было предложено использовать не абсолютный порог сравнения интенсивностей пикселей, а относительный, значение которого в каждом кадре зависит от интенсивности центрального пикселя рассматриваемого блока. Также предлагаемая методика предполагает отказ от применения сложных вычислений при сравнении интенсивностей пикселей. Каскад вычислений может быть значительно упрощен последовательным поканальным вычислением с ранним завершением цикла проверок, если локальной информации становится достаточно для классификации рассматриваемого пикселя на основе порога для сравнения по отдельному каналу.
В процессе тестирования было отмечено, что использование только одной из этих модификаций улучшает качество распознавания несущественно, в то время как одновременное применение нововведений в рамках максимальной конфигурации алгоритма позволяет достичь значительного прироста показателей эффективности алгоритма. Это объясняется тем, что комбинация фильтра Кувахара и LBP-дескриптора взаимно компенсирует недостатки этих методик. Дополнительно было замечено, что в связи с особенностями реализации алгоритм успешно справляется с некоторыми негативными факторами распознавания, такими как изменение освещенности сцены, наличие теней и медленно перемещающихся объектов, а также точечные всплески интенсивности пикселей вследствие высокочастотных колебаний фона.
По результатам тестирования был сделан вывод о том, что качество распознавания предложенного алгоритма выше, чем у других современных методов по извлечению фона. В дальнейшем можно интегрировать предложенный метод с другими современными алгоритмами для получения более оптимальных результатов, например для сцен с динамическим фоном. Также в качестве улучшений в будущих исследованиях планируется оптимизировать потребление вычислительных ресурсов.
Библиографическая ссылка
Макаров О.С., Щенникова Е.В. АЛГОРИТМ УЛУЧШЕНИЯ ПОВЕРХНОСТНО-ВРЕМЕННЫХ МЕТОДОВ РАСПОЗНАВАНИЯ ДВИЖЕНИЯ // Современные наукоемкие технологии. 2024. № 11. С. 53-60;URL: https://top-technologies.ru/en/article/view?id=40210 (дата обращения: 02.08.2026).
DOI: https://doi.org/10.17513/snt.40210