


Scientific journal
Modern high technologies
ISSN 1812-7320
"Перечень" ВАК
ИФ РИНЦ = 1,279
PREDICTIVE MODELING AND TIMING PUBLIC TRANSPORT TRAFFIC

В современных городских условиях управление движением общественного транспорта (ОТ) становится одним из важных аспектов повседневной жизни. С увеличением мобильности населения и развитием городской инфраструктуры возникает необходимость в инновационных подходах к оптимизации графиков движения транспортных средств. В работе исследуются вопросы разработки методики прогностического моделирования и расчета параметров движения ОТ. Скорость движения ОТ в городской среде зависит от загруженности городских автомагистралей, от средней скорости движения транспортных средств (ТС), от дорожно-транспортных происшествий (ДТП) на маршруте следования, от работы светофорных объектов. Основной задачей является анализ загруженности участков дорог на маршрутах следования ОТ с целью регулирования его движения, прогнозирования времени прибытия на промежуточные и конечные точки маршрута. Решение задачи необходимо для автоматизации процессов диспетчерского управления транспортными потоками в городской среде с возможностью оперативного информирования пассажиров на остановочных пунктах о времени возможного ожидания ОТ. Целью исследования является разработка модели и методики прогностического моделирования и коррекции времени прибытия городского транспорта на остановки на основе сбора и анализа GPS данных. Для достижения цели решаются задачи: а) анализ факторов влияния на скоростные и временные параметры движения ОТ, б) синтез модели прогнозирования, в) разработка методики расчета скоростных и временных параметров движения транспорта с учетом влияния факторов, г) разработка приложения для реализации методики, д) оценка точности моделирования и корректировка времени прибытия транспорта.
Разработанная методика предназначена для повышения эффективности работы организаций, занимающихся диспетчерским управлением и обслуживанием городского ОТ. В настоящее время важной задачей является улучшение методов и средств диспетчерского управления процессами движения ОТ. В частности, к таким организациям относится городской диспетчерский центр управления пассажирским транспортом. Современные системы диспетчерского управления транспортом должны выполнять следующие функции: автоматический сбор GPS данных о местонахождении транспортного средства, автоматическое представление данных о сбоях и отклонениях от расписания движения транспорта, контроль управляющих воздействий системы управления для коррекции и стабилизации процессов движения, обеспечение связи диспетчера с водителями, визуализация местоположения ОТ на карте и схемы движения в режиме реального времени, уведомление пассажиров о движении единиц ОТ, оперативное определение возникновения различных ситуаций и ДТП и т.д. Основной задачей является обеспечение диспетчеров и пассажиров оперативной и максимально точной информацией о текущем положении единиц ОТ для точного расчета времени его прибытия на промежуточные и конечную точки маршрута. В настоящее время есть три базовых модели диспетчерского управления пассажирским транспортом: релейная, псевдоимпульсная и импульсная (цифровая) модели. В случае релейной модели информация о положении ТС обрабатывается после его прибытия на промежуточный или конечный контрольный пункт. Эта модель используется в традиционных автоматизированных системах диспетчерского управления. Псевдоимпульсная модель используется в радионавигационных системах диспетчерского управления, когда информация поступает с заданной периодичностью и используется для отображения ТС на карте. В цифровой модели навигационная информация обрабатывается и используется для определения местоположения ТС на маршруте. Для повышения эффективности работы цифровой модели диспетчерского управления и предназначена предлагаемая методика прогностического моделирования времени движения единиц ОТ, а также для оперативного оповещения пассажиров о времени ожидания. Решение проблем совершенствования диспетчерского управления ОТ относится к задачам развития современных организационных систем.
Материалы и методы исследования
Большинство методов определения интервалов движения и времени прибытия ОТ на промежуточные и конечные точки маршрутов следования работают на основе технологии GPS трекинга. GPS модуль в режиме реального времени представляет информацию о местоположении ТС, что позволяет предсказывать его местоположение в следующие моменты времени. Задача максимально точного прогнозирования времени прибытия ТС на промежуточную или в конечную точку маршрута следования сводится к оценке ожидаемого времени в пути между выбранными точками, так, чтобы оно наиболее точно соответствовало реальному времени прибытия. Существует несколько подходов к прогнозированию времени прибытия ТС. К ним относятся метод прогноза на основе архивных данных [1], мониторинг GPS данных в реальном времени [2], методика прогноза на основе статистического анализа [3], методы с использованием технологий машинного обучения [4] на основе опорных векторов [5], фильтрации Калмана [6], нейронных сетей [7] и т.д. Метод прогноза по архивным данным позволяет предсказывать время движения в определенный период дня посредством расчета среднего времени проезда участка другими ТС в тот же период за предыдущие дни [8]. Метод с использованием GPS данных прогнозирует прибытие транспорта, опираясь на его текущее положение и скорость. Статистические подходы в основном используют регрессионные модели для прогнозирования времени прибытия транспорта. Метод машинного обучения с использованием опорных векторов требует временных и вычислительных затрат на обучение модели прогноза времени прибытия. Применение нейронных сетей позволяет учесть нелинейные взаимосвязи между разными факторами, оказывающими существенное влияние при прогнозировании времени прибытия [9]. Однако этот метод также требует обучения, подбора входных переменных и обладает вычислительной сложностью.
Интеграция различных подходов при решении задачи дает неплохие результаты. В работе [10] предложен интегрированный метод применения GPS данных с фильтром Калмана для отслеживания ТС. В работе [11] предлагается объединение линейной регрессионной модели с локально взвешенной регрессионной моделью для повышения точности. Модели прогноза с фильтрацией лучше всего решают задачу вместе с моделью нейронной сети [12].
При расчете времени движения на маршрутах в навигационных сервисах используется информация о прогнозируемой скорости движения на участках маршрута согласно координатам, которые поступают от GPS модулей. Ожидаемая скорость на участке дороги учитывает данные о реальном движении, получаемые от ТС, которые ранее проехали участок. Ряд факторов влияют на скорость движения, в частности интенсивность движения, которая меняется в часы пиковой загрузки, что определяет фактор сезонности. При возникновении внезапной помехи скорость ТС замедляется, перерасчет времени движения ТС происходит с запозданием. На изменения средней скорости оказывают влияние параметры транспортных и пешеходных потоков, пробки, работа спецтехники, изменения светофорных циклов и т.д. Для прогноза времени прибытия на остановки применяется методика прогностической оценки средней скорости движения на каждом участке маршрута.
Маршруты движения ОТ моделируются ориентированным графом. Взвешенные ребра графа представляют участки дорог между остановками и перекрестками. Стрелки ребер показывают направления движения. Между вершинами графа может быть несколько ребер, которые моделируют полосы движения. Остановки ОТ и перекрестки являются вершинами графа. Расчет весов расстояний между вершинами выполняется по их GPS-координатам. Кроме весов расстояний в методике учитываются веса факторов, которые оказывают влияние на характер движения на участке. Веса характеризуют скоростные ограничения, число нерегулируемых перекрестков и пешеходных переходов, загруженность участка, число и длительность фаз светофорных циклов, среднее время посадки/высадки пассажиров, среднее время ожидания на светофорах, на выездах на главную дорогу, перед нерегулируемым пешеходным переходом, перед остановкой при ее занятости другим транспортом и т.п. Веса нормализуются, и определяется общий весовой коэффициент для каждого ребра графа в виде свертки всех весов.
Так как ОТ идет по заранее заданному маршруту, который он может менять только в экстренных ситуациях, то на графе изначально существует один маршрут. Расчет времени движения по маршруту зависит от значений весовых коэффициентов ребер в момент времени. Периодически выполняется обновление весов и перерасчет общего весового коэффициента. Изменения весов представляется временными рядами с сезонной составляющей (часы пик) и случайными флуктуациями (дорожные инциденты).
Методика предиктивного моделирования средней скорости и времени движения транспорта на маршруте основана на модели линейной векторной авторегрессии. Модель векторной авторегрессии в векторно-матричной записи:
 (1)
(1)
Методика прогностического моделирования представляет собой предиктивный анализ нескольких временных рядов изменений средних скоростей единиц ОТ, которые ранее проехали по данному маршруту. Основной гипотезой является то, что прогнозируемая средняя скорость движения текущей единицы ОТ на маршруте может быть определена по динамике изменений средних скоростей нескольких ранее проехавших аналогичных единиц ОТ на данном маршруте, которые зафиксированы как значения временных рядов. Метод предиктивного анализа базируется на технологии глубокого обучения для интегрированной модели рекуррентной нейронной сети (RNN) и модели трансформера в качестве механизма внимания. На первом этапе выполняется подготовка временных рядов данных, включая сбор, фильтрацию, нормализацию данных о скоростях единиц ОТ и представление их последовательности в виде временного ряда. Далее синтезируется модель RNN c архитектурой трансформера и выполняется настройка кодирующих и декодирующих слоев трансформера. Следующим этапом является обучение модели на подготовленных данных. Модель прогнозирования обучается каждые сутки на основе зафиксированных времени движения на маршруте и скоростей транспортных средств за определенные временные промежутки. Выбирается четыре шаблонных временных интервала для обучения: ночное время, часы пик утром, часы пик вечером, время между утренней и вечерней пиковой загрузкой. В ходе обучения для каждого шаблонного интервала выполняется прогноз средней скорости и сравнивается с реальной зафиксированной скоростью на конкретном маршруте. По полученной погрешности прогноза настраиваются весовые коэффициенты на каждом слое методом градиентного спуска с целью минимизации функции потерь. Это необходимо, чтобы минимизировать погрешность для прогноза средней скорости единиц ОТ в каждый шаблонный интервал на следующие сутки. В завершение выполняется визуализация прогнозируемого сегмента временного ряда и сравнение с фактическим. Если результаты не устраивают, то выполняется корректировка модели для повышения точности. Настройка включает изменение весовых коэффициентов, функции потерь, числа слоев, количества нейронов в слое. Для текущего прогнозирования по настроенной суточной модели и получаемым GPS трекам транспорта на каждом маршруте выполняется прогностическое моделирование средней скорости на ближайший час.
Методика может применяться не только для расчета и прогноза времени прибытия, но и для решения обратной задачи поиска оптимального маршрута на графе для минимизации времени достижения конечной точки маршрута. Основными параметрами, которые влияют на результаты прогнозирования средней скорости и времени движения ОТ по маршруту, являются: а) время проезда между остановками на маршруте (зависит от средней скорости на данном участке), б) время посадки/высадки пассажиров (зависит от числа пассажиров), в) время старта и торможения перед остановками, г) время ожидания проезда на светофорных объектах, д) время проезда нерегулируемых перекрестков (зависит от интенсивности движения транспорта), е) время ожидания из-за колебаний загруженности и случайных задержек (зависит от пробок, работы спецтехники, погодных условий, ДТП и т.п.). Значения весовых коэффициентов, которые должны учитывать влияние данных факторов, подбираются экспериментально в процессе мониторинга реальной работы ОТ. В дальнейшем они корректируются при изменении условий движения. Результатами прогноза являются:
1. Время движения между остановками i и j:
 , (2)
, (2)
где  – расстояние между остановками по маршрутному графу,
– расстояние между остановками по маршрутному графу,  – средняя скорость на участке дороги, wij – весовой коэффициент для учета различных факторов влияния на расчет времени движения.
– средняя скорость на участке дороги, wij – весовой коэффициент для учета различных факторов влияния на расчет времени движения.
2. Средняя скорость, которая определяется по длине участка дороги () ребра и среднему времени проезда всеми зафиксированными ТС за интервал времени:
 ,
,  (3)
(3)
где  ,
,  – время прибытия m-того ТС на i-ю и j-ю остановки по GPS данным, K – число ТС, проехавших между вершинами ребра графа за интервал времени.
– время прибытия m-того ТС на i-ю и j-ю остановки по GPS данным, K – число ТС, проехавших между вершинами ребра графа за интервал времени.
В случае отсутствия проезда ТС за интервал времени, данный интервал увеличивается, или считается средняя скорость за предыдущий интервал.
3. Ожидаемое время прибытия  на j-ю остановку определяется как
на j-ю остановку определяется как
 , (4)
, (4)
где  – время посадки/высадки пассажиров,
– время посадки/высадки пассажиров,  – время старта/торможения перед остановками,
– время старта/торможения перед остановками,  – время проезда через перекрестки, Sij – число перекрестков на участке между i-й и j-й остановками.
– время проезда через перекрестки, Sij – число перекрестков на участке между i-й и j-й остановками.
4. Для расчета времени прибытия в конечную точку маршрута подсчитывается суммарное время проезда по всем ребрам маршрута со средней скоростью.
Средние скорости единиц ОТ постоянно меняются из-за различных факторов. Поэтому изменяются веса ребер, которые определяют вклад фактора в расчет времени проезда. Влияние также оказывает сезонная составляющая, которая определяет два промежутка времени с резко возрастающей интенсивностью дорожного движения и случайные изменения дорожных ситуаций. Для оценки точности прогноза времени прибытия используется метрика среднего абсолютного отклонения в процентах, которая показывает, на сколько процентов прогнозное время отличается от реального, которое измеряется по GPS данным. Метрика решает проблему интерпретации результатов, так как не надо оценивать длительность движения по маршруту.
Результаты исследования и их обсуждение
Для реализации методики прогностического моделирования и повышения эффективности работы городского центра диспетчерского управления пассажирским транспортом разработано соответствующее приложение. В приложении реализован следующий функционал.
1. Определение классов данных: а) класс GPSData для сбора и хранения GPS-данных, б) класс Schedule для сбора и хранения информации о движения транспорта, включая время посадки/высадки пассажиров, начала и окончания движения на остановках, проезда через перекрестки, задержек на незапланированных точках маршрута (пешеходных переходах, в местах ДТП, нерегулируемых перекрестках, в местах работы спецтехники и т.п.).
2. Подготовка и анализ данных GPS для синтеза временных рядов единиц ОТ. Функция analyze_gps_data работает с GPS данными, текущими изменениями средней скорости единиц ОТ, расстояниями между остановками, регулируемыми и нерегулируемыми перекрестками, временными задержками для задания и изменения весовых коэффициентов модели. По результатам анализа изменения координат выполняется синтез временных рядов скоростей единиц ОТ на участке дороги (ребре графа) и прогнозный расчет времени его проезда, которые записываются в базу данных для каждого ребра маршрутного графа.
3. Прогностическое моделирование средней скорости движения единиц ОТ и времени движения на участке с учетов весовых коэффициентов. Функция run_simulation создает объект с GPS данными и вызывает функцию предиктивного анализа временного ряда на нейросети, которая возвращает прогнозную скорость ОТ на участке.
4. Расчет времени прибытия на остановки по прогнозируемой средней скорости на каждом участке маршрута. Далее формируется расписание с временами прибытия на точки маршрута и вызывается функция коррекции графика движения. Входными данными для функции forecast_and_correct являются объект (единица ОТ), прогнозная средняя скорость для ребра графа, интервал движения, расстояние между вершинами ребра. Для каждой остановки прогнозируется время ожидания с учетом средней скорости единицы ОТ и выполняется коррекция графика движения транспорта.
Для тестирования работы приложения был выбран маршрут движения автобуса № 130 в городе с остановками, отмеченными на карте (рис. 1).
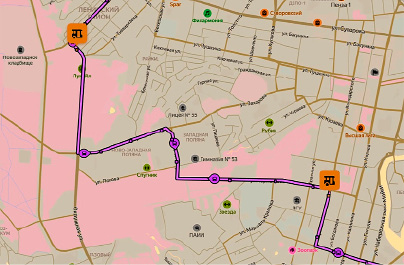
Рис. 1. Пример фрагмента автобусного маршрута
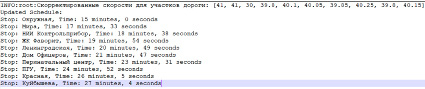
Рис. 2. Результаты прогностического моделирования
На фрагменте маршрута присутствует 10 остановок. Для моделирования задается интервал обновления весов A = 15 мин и другие входные данные. Результаты прогностического моделирования времени показывают, как меняется скорость ТС на разных интервалах в зависимости от задержки (рис. 2).
В ходе апробации алгоритма, для единиц ОТ в городе с населением около 500 тыс. человек (г. Пенза), были определены основные показатели, для которых достигнута максимальная точность прогноза, а именно средняя длина участка – от 280 до 330 м, горизонт прогнозирования – не более 2,5 ч, средняя скорость единиц ОТ – 36 км/ч, а в часы пик – 17 км/ч, средняя погрешность прогноза – 6 %. Применение метода прогнозирования средней скорости и времени прибытия ОТ на промежуточные и конечную точки маршрута позволило центру диспетчерского управления движением транспорта эффективно вести мониторинг, организовать планирование и оперативно корректировать расписание движения единиц ОТ на маршрутах. Работа приложения в службах диспетчеризации городского транспорта позволяет пассажирам через мобильные средства связи получать оперативную информацию о движении и сроках прибытия ОТ.
Заключение
Применение методики и программного приложения позволяет эффективно учитывать условия дорожного движения, что способствует повышению точности расчета времени прибытия общественного транспорта на промежуточные и конечные точки маршрута следования. Простота интеграции с системами диспетчерского управления и адаптация к различным дорожным условиям делают его инструментарием для оптимизации графиков движения и информирования городского населения об изменениях в расписании движения общественного транспорта. Дальнейшая работа над методикой и приложением предполагает применение в методике архитектуры рекуррентной нейронной сети с механизмом трансформера не только для прогноза средней скорости движения на маршруте, но и для прогнозирования временных рядов изменения весовых коэффициентов, учитывающих факторы влияния и различные задержки на маршруте. Прогнозную модель предлагается обучить и тестировать в городских условиях на данных об изменениях интенсивности и плотности автомобильного и пешеходного трафика на участках. Также предполагается добавить возможность реагирования на появление незапланированных препятствий при движении общественного транспорта по маршруту следования и в случае вынужденного изменения маршрута. Расширенная методика и комбинированная прогностическая модель позволит расширить функциональность приложения, повысить эффективность и точность оценки временных показателей движения городского общественного транспорта. В настоящее время модуль прогностической оценки времени движения и прибытия общественного транспорта реализуется в системе интеллектуального мониторинга городской дорожно-транспортной инфраструктуры.
Библиографическая ссылка
Финогеев А.А., Майоров Р.С., Деев М.В. ПРЕДИКТИВНОЕ МОДЕЛИРОВАНИЕ И РАСЧЕТ ВРЕМЕНИ ДВИЖЕНИЯ ОБЩЕСТВЕННОГО ТРАНСПОРТА // Современные наукоемкие технологии. 2024. № 5-1. С. 89-95;URL: https://top-technologies.ru/en/article/view?id=40010 (дата обращения: 01.08.2026).
DOI: https://doi.org/10.17513/snt.40010