


Scientific journal
Modern high technologies
ISSN 1812-7320
"Перечень" ВАК
ИФ РИНЦ = 1,279
STUDY OF THE DEVELOPMENT DYNAMICS OF PROFESSIONALLY IMPORTANT QUALITIES OF FORESTRY MACHINE OPERATORS IN VIRTUAL ENVIRONMENTS

Эффективность работы оператора лесозаготовительной техники в настоящее время является наиболее значимым фактором, определяющим большинство технико-экономических показателей качества технологического процесса машинизированной сортиментной лесозаготовки. Установлено, что эффективность работы оператора оказывает существенное влияние на качество заготовленной древесины [1], производительность технологического процесса лесозаготовки [2], надежность эксплуатируемой лесозаготовительной техники [3].
Для операторской деятельности в задачах управления лесозаготовительной техникой свойственно решение двух типов задач. Первым типом задач являются задачи, связанные с теоретическими знаниями о процессе лесозаготовки в области лесоустройства в целом и о процессе лесозаготовки в частности. К этим задачам относятся построение оптимального маршрута движения лесозаготовительной техники по лесосеке, отбор деревьев в соответствии с типом выполняемой рубки, выбор оптимальной последовательности рубки деревьев. Эффективность, а именно скорость и точность решения этих задач, обеспечивается теоретической подготовкой оператора. Установлено, что операторы, прошедшие более глубокую теоретическую подготовку в области лесоустройства, имеют более высокую эффективность в данных типах задач по сравнению с теми операторами, которые данной подготовки не имеют или имеют менее глубокие теоретические знания [4].
Вторым типом задач являются задачи, связанные с техническими навыками управления и манипулирования технологическим оборудованием. К этим задачам относятся наведение рабочих органов машины на дерево, захват дерева захватно-срезающим устройством, спиливание и обработка дерева. Эффективность решения данного класса задач также определяется скоростью и точностью пространственного наведения, а обеспечивается профессионально важными качествами и уровнем развития психофизиологических факторов человека.
Таким образом, повышение эффективности работы оператора-манипулятора в задачах управления лесозаготовительной техникой является комплексной и многофакторной задачей, состоящей как из повышения уровня теоретических знаний о процессе сортиментной лесозаготовки, так и из отработки технических навыков управления технологическими агрегатами лесозаготовительной техники.
Повышение требований к эффективности деятельности человека-оператора привело к возникновению и развитию принципиально новых форм и технологий тренировки персонала, в частности технологии виртуальной реальности [5, 6], технологии когнитивной и биомеханической поддержки оператора [7]. В настоящее время при обучении операторов лесных машин для решения задачи отработки технических навыков управления технологическими агрегатами лесозаготовительной техникой активно применяются симуляторы и тренажеры технологического оборудования. Известна семантическая модель профессионально важных качеств оператора-манипулятора при выполнении технологического процесса сортиментной лесозаготовки [8]. Установлено, что важнейшими профессионально важными качествами оператора-манипулятора с точки зрения технических навыков, необходимых при осуществлении машинизированной сортиментной лесозаготовки, являются точность зрительно-моторного слежения, скорость реакции на движущийся объект, скорость реакции на приближающийся объект, определяющие точность взаимодействия рабочих органов лесозаготовительной машины с предметом труда. Таким образом, развитие технических навыков оператора-манипулятора в процессе обучения с использованием симуляторов и тренажерных комплексов лесозаготовительной техники направлено именно на улучшение показателей скорости и точности пространственного восприятия и зрительно-моторного слежения.
Цель исследования – экспериментальное определение динамики развития профессионально важных качеств операторов лесозаготовительной техники в виртуальных средах.
Материалы и методы исследования
Работа на симуляторе не может реализовать полноценное восприятие курсантом рабочей обстановки в лесозаготовительной технике, поэтому может создаться неправильное восприятие реальной задачи [9]. Этот факт связан с тем, что процессы восприятия зрительной информации с электронных дисплеев отличаются от процессов восприятия зрительной информации в физической среде. Для того, чтобы реализовать те же механизмы восприятия зрительной информации оператором в процессе обучения на симуляторах, что и при работе на реальном технологическом оборудовании, в настоящее время используют виртуальные обучающие среды с глубоким вызванным эффектом присутствия [10].
Эффект присутствия в виртуальной реальности заключается в возникающем у человека ощущении полного погружения в виртуальное пространство, где он воспринимает окружающую среду как реальную. При этом задействованы те же механизмы стереоскопического человеческого зрения при восприятии зрительной информации, что и в реальных физических средах. Этот эффект достигается путем использования специальных технических средств, такого как шлемы VR, контроллеры и другие устройства для взаимодействия с виртуальной обучающей средой.
Для оценки динамики изменения психофизиологических показателей в составе профессионально важных качеств исследуемых обучающихся предложено провести оценку способности к управлению манипулятором лесозаготовительной машины с использованием шлема виртуальной реальности HTC VIVE PRO.
Для обеспечения соответствия движению рабочего органа лесозаготовительной машины в тесте определения точности наведения выдвижением рабочего органа лесозаготовительной машины движение объекта формировалось за счет увеличения тестового объекта в диаметре на 100 пикселей за секунду и уменьшения замкнутого контура на 10 пикселей за секунду, имитируя движение его навстречу испытуемому. Исходный диаметр тестового объекта составил 100 пикселей, а диаметр замкнутого контура 600 пикселей.
Для отображения зрительных стимулов была разработана программа в среде программирования Unity, позволяющая отображать тестовое задание в шлеме виртуальной реальности HTC VIVE PRO.
В качестве добровольцев, принявших участие в исследовании, были выбраны 10 здоровых людей 19–24 лет с нормальным или скорректированным зрением.
В течение 6 дней каждому оператору предлагалось пройти тестирование с использованием метода оценки точности наведения выдвижением рабочего органа лесозаготовительной машины на дерево).
Рассмотрим метод определения точности наведения выдвижением рабочего органа лесозаготовительной машины на дерево. В данном тесте человеку на экране шлема виртуальной реальности HTC VIVE PRO предъявляют окружность, являющуюся ограничивающим полем, внутри которой размещен тестовый объект круглой формы.
На рис. 1 представлена окружность, предъявляемая испытуемому на экране видеомонитора, где 1 – замкнутая окружность, границы которой являются меткой и уменьшающаяся в диаметре с заданной скоростью, 2 – тестовый объект, увеличивающийся в диаметре с заданной скоростью.
Тестовый объект увеличивают, а замкнутую окружность уменьшают в диаметре, соответственно заданной скорости при этом происходит имитация движения его навстречу оператору. В момент, когда оператор считает, что размеры ограничивающего замкнутого контура и тестового объекта совпадают, то оператор нажимает кнопку пульта и движение объектов прекращается. При этом вычисляют ошибку несовпадения диаметров тестового объекта и ограничивающего контура, что будет являться временем ошибки запаздывания (с положительным знаком) или упреждения (с отрицательным знаком).
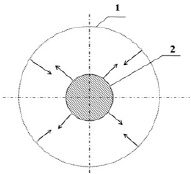
Рис. 1. Схема тестирования методом оценки точности наведения выдвижением рабочего органа лесозаготовительной машины на дерево
На следующем этапе вычисляют время реакции Тр человека на движущийся объект как среднеарифметическое значение по формуле
 , (1)
, (1)
где ti – i-я ошибка несовпадения окружности и объекта, мс; n – число остановок точечного объекта в процессе прохождения тестирования.
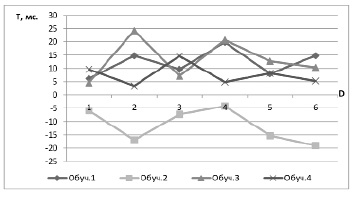
Рис. 2. График динамики значений результата тестирования у обучающихся из первой группы: Т – результат тестирования с использованием метода оценки точности наведения выдвижением рабочего органа лесозаготовительной машины на дерево; D – день исследования
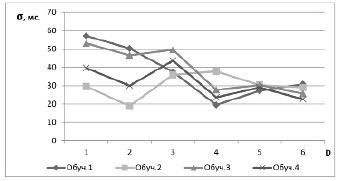
Рис. 3. График динамики значений результата оценки среднеквадратического отклонения результатов тестирования у обучающихся из первой группы: Т – результат тестирования с использованием метода оценки точности наведения выдвижением рабочего органа лесозаготовительной машины на дерево; D – день исследования
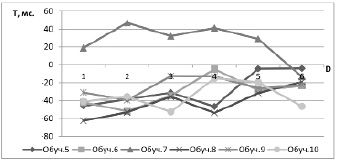
Рис. 4. График динамики значений результата тестирования у обучающихся из второй группы: Т – результат тестирования с использованием метода оценки точности наведения выдвижением рабочего органа лесозаготовительной машины на дерево; D – день исследования
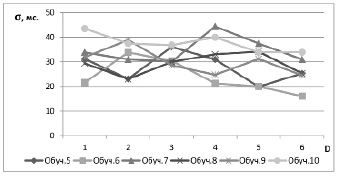
Рис. 5. График динамики значений результата оценки среднеквадратического отклонения результатов тестирования у обучающихся из второй группы: Т – результат тестирования с использованием метода оценки точности наведения выдвижением рабочего органа лесозаготовительной машины на дерево; D – день исследования
Через заданное время оператору предъявляют данные объекты в первоначальном размере, и тест повторяется заданное число раз.
Измерения выполнялись бинокулярно в помещении в светлое время суток в первой половине дня с 9 до 14 ч. Все испытуемые перед проведением исследований проходили 20-минутную световую адаптацию.
Результаты исследования и их обсуждение
Данные, полученные в первый день эксперимента, считались исходными измеренными параметрами зрительного анализатора. Для удобства отображения информации на графиках по результатам прохождения тестирования в первый день в первую группу (результат теста от -10 до 10 мс) были отнесены 4 оператора, а во вторую (остальные испытуемые) 6 операторов.
Результаты проведенного эксперимента представлены на рис. 2–5.
Заключение
Из анализа представленных результатов можно сделать несколько выводов о динамике процесса обучения. Почти у всех операторов наблюдается снижение показаний среднеквадратического отклонения результатов тестирования от первого дня исследования до последнего. Это свидетельствует о более качественном выполнении поставленной задачи и получении к концу исследования реальных показаний психофизиологических характеристик.
Можно отметить, что у первой группы операторов диапазон значений среднеквадратического отклонения в среднем по группе снизился с 44,86 до 27,04 мс. У второй группы испытуемых диапазон значений среднеквадратического отклонения в среднем по группе снизился с 31,9 до 26,08 мс. Отсюда можно сделать вывод, что максимальное улучшение показателя среднеквадратического отклонения было у первой группы, что свидетельствует о более быстрой адаптации исполнителей из данной группы к выполнению тестовых заданий.
Библиографическая ссылка
Курасов П.А., Петухов И.В., Стешина Л.А., Танрывердиев И.О. ИССЛЕДОВАНИЕ ДИНАМИКИ РАЗВИТИЯ ПРОФЕССИОНАЛЬНО ВАЖНЫХ КАЧЕСТВ ОПЕРАТОРОВ ЛЕСНЫХ МАШИН В ВИРТУАЛЬНЫХ СРЕДАХ // Современные наукоемкие технологии. 2023. № 12-2. С. 221-225;URL: https://top-technologies.ru/en/article/view?id=39885 (дата обращения: 11.07.2026).
DOI: https://doi.org/10.17513/snt.39885