


Scientific journal
Modern high technologies
ISSN 1812-7320
"Перечень" ВАК
ИФ РИНЦ = 1,279
CONTROL OBJECT AND ITS MATH MODEL PARALLEL OPERATION ASSESSMENT FOR THE EXAMPLE OF HYBRID SPEED OF ROTATION CONTROL SYSTEM OPERATION WITHIN SINE WAVE IMPACT

В настоящее время все большее распространение в быту и промышленности получают нечеткие регуляторы, реализующие на практике нечеткие алгоритмы управления агрегатами, механизмами, а также технологическими процессами [1]. Теория нечетких множеств позволяет задавать алгоритмы изменения настроечных параметров корректирующих устройств в зависимости от отклонения регулируемой величины и скорости изменения отклонения [1]. Оперативное же изменение настроечных параметров регулятора позволяет качественно перейти на более высокий уровень управления технологическими процессами, сопровождающими деятельность человека [2]. Кроме того, важным преимуществом такой конфигурации является возможность быстрого создания прототипа технического устройства с последующим усложнением его функциональности [3]. Также нечеткие модели зачастую оказываются более простыми для своей аппаратной реализации по сравнению с классическими аналогами [4]. В отношении корректировки регулирующего воздействия при наличии синусоидального нагрузочного воздействия на объект нечеткий регулятор предлагается использовать в качестве звена, определяющего значение временной задержки подачи регулирующего воздействия [5].
Принцип действия модели был подробно описан в работе [5]. Коротко раскрыть его можно следующим образом.
В начальный момент времени заданное значение частоты вращения поступает с машинного телеграфа на элемент сравнения, где определяется текущая ошибка регулирования. Далее она поступает на вход регулятора, где определяется регулирующее воздействие в соответствии с текущим законом управления. Рассчитанное регулирующее воздействие в виде электрического сигнала поступает на усилитель и далее в контур подготовки и подачи топлива, где посредством расчета выходных воздействий передаточных функций определяется расход топлива каждого из шести цилиндров. Определенное значение поступает на вход модели судового главного малооборотного двигателя, выходным сигналом которой служит частота вращения коленчатого вала двигателя. Одновременно с реализацией функции обратной связи текущее значение регулируемой величины поступает в блок дискретизации. Данный модуль необходим в связи с использованием искусственной нейронной сети и необходимостью сведения аналогового входного значения к амплитудным величинам массива входных воздействий искусственной нейронной сети [5]. Преобразованное значение регулируемой величины поступает в модуль определения частоты синусоидального сигнала на основе искусственной нейронной сети. Каждая итерация входного сигнала частоты вращения коленчатого вала обновляет вектор-столбец входных значений искусственной нейронной сети [6]. Таким образом, на вход ИНС постоянно поступает массив информации, описывающий форму текущего процесса управления. Последующая обработка вектор-столбца возлагается на разработанную структуру ИНС. Нейронная сеть формирует непрерывный сигнал, соответствующий входному сигналу, представляющему собой частоту вращения коленчатого вала, который в последующем подвергается дополнительной фильтрации. Необходимое здесь определение среднего значения за расчетный период времени реализуется блоком определения среднего – БОС [7].
Окончательное рассчитанное значение частоты возмущающего воздействия поступает на вход нечеткого регулятора, который и формирует сигнал задержки для подачи управляющего воздействия в реальный объект. Результатом служит значительное снижение амплитуды колебаний регулируемой величины (рис. 1) [7] при введении разработанного контура в работу.
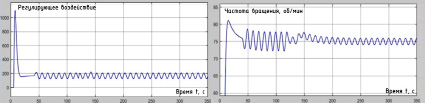
Рис. 1. Форма переходного процесса при работе судового главного малооборотного двигателя на частоте вращения 75 об./мин и при синусоидальной нагрузке частотой 0,1 Гц, компенсируемой разработанной структурой
Рис. 2. Перестроенная по методу абстрагирования модель гибридной системы управления частотой вращения судового главного малооборотного двигателя
Однако чаще всего синусоидальные возмущения не возникают внезапно. Из области морского транспорта известно, что изменение погодных условий представляет собой весьма инерционный процесс [8]. В связи с этим целесообразно рассмотреть реакцию полученной структуры на постепенное изменение возмущающего воздействия.
Целью исследования служит определение качества работы «цифрового двойника» реального объекта в процессе долгосрочного изменения частоты возмущающего воздействия на основе разработанной авторами модели.
Материалы и методы исследования
Для достижения поставленной цели воспользуемся методом воспроизведения результатов наблюдения в условиях изменения нагрузочного воздействия, а также методом определения численных характеристик объекта исследования. В данном случае − всей гибридной системы управления. Для этой цели целесообразно провести рассмотрение работы реального объекта совместно с его моделью при наличии синусоидального воздействия по методу абстрагирования от работы искусственной нейронной сети, а также нечеткого регулятора (рис. 2). Кроме того, в данном примере для упрощения конфигурации системы она рассматривается как изолированная, а воздействие как входной сигнал идеальной синусоидальной формы.
Задача здесь состоит в определении качества совместной работы реального объекта и его модели при появлении и присутствии синусоидального возмущения. Для этой цели целесообразно построить зависимость значений амплитуды колебаний регулируемой величины от значений изменения задержки воздействия при неизменных параметрах регулятора и всех промежуточных звеньев. Как указано в работе [5], оптимальными выходными значениями нечеткого регулятора (то есть задержки воздействия) являются следующие:

где fвозд – есть частота регулирующего воздействия.
В данном же случае необходимо оценить относительное значение изменения амплитуды колебательного процесса при введении нейросетевого корректирующего звена в работу при неизменных параметрах процесса:

где Xmax2 и Xmin2 – максимальное и минимальное значения регулируемой величины до введения в работу нейросетевого корректирующего звена, а Xmax1 и Xmin1 – максимальное и минимальное значения регулируемой величины после введения его в работу.
Зависимость изменения значения величины α от временной задержки Δ, определяемой нечетким регулятором, имеет вид
α = f(Δ).
Полученная характеристика примет вид, показанный на рис. 3.
Как видно из рисунка, наиболее эффективным и качественным процесс управления можно считать на частотах воздействия в пределах 0,05–0,1 Гц, соответствующих типовому воздействию водной среды на поверхности океана, когда борьба с ним обретает вполне определенный смысл.
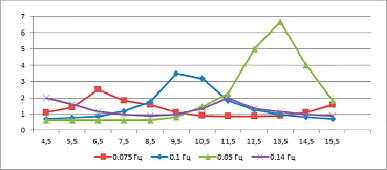
Рис. 3. Характеристика зависимости α = f(Δ)
Рис. 4. Формы сигналов с источников синусоидальных сигналов, симулирующих изменения показателей «Частота воздействия» и «Задержка воздействия»
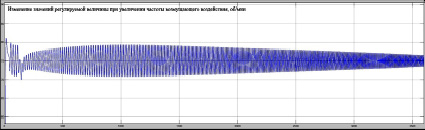
Рис. 5. Изменение значений регулируемой величины при увеличении частоты возмущающего воздействия и соответствующей корректировке задержки подачи управляющего воздействия на объект управления
Данный процесс соответствует значительному волнению, когда период морской волны составляет значения в пределах 10–20 с. Именно в этих случаях целесообразно вводить дополнительные меры борьбы с внешним воздействием, так как периодическая составляющая воздействия способна значительно увеличить нагрузку на объект управления и привести к появлению нежелательных резонансных явлений в агрегатах и механизмах [5].
Разработанная структура позволяет для случаев воздействий данных частот снизить амплитуду колебаний регулируемой величины до 7 раз, что является критически важным как в целях экономии топливно-энергетических ресурсов, так и эксплуатационных ресурсов основных и вспомогательных агрегатов и механизмов объекта управления. В частности, по нашей предварительной оценке предложенный метод способен сэкономить до 3,2 млн руб. за 6 месяцев эксплуатации и до 128 ч на обслуживание или 138 ч на ремонт или замену. При этом данные приблизительные расчеты не учитывают степени влияния вибраций на сварные конструкции и фундаментные рамы, выходы из строя которых также чреваты значительными простоями и издержками. Кроме того, преждевременный износ дейдвудного сальника способен вывести судно из эксплуатации на продолжительный период, что чревато значительными издержками на ремонтные работы и простои.
Выход из строя датчиков и электронно-вычислительной техники не всегда сопровождается наличием на борту запасных частей и достаточной квалификацией обслуживающего персонала для проведения ремонтных и наладочных работ. По этой причине реально сэкономленные для судовладельца суммы могут разниться и представлять значительные величины [6].
Поскольку в рамках данной статьи перед авторами была поставлена задача рассмотрения работы объекта управления параллельно с его математической моделью при изменении частоты возмущающего воздействия, то для этой цели целесообразно перестроить схему на рис. 2 к виду, представленному на рис. 4.
Здесь источники сигналов «Частота воздействия» и «Задержка воздействия» заменены на источники синусоидальных сигналов, которые моделируют постепенное увеличение частоты возмущающего воздействия, а также соответствующее изменение времени задержки подачи воздействия на объект управления в течение одного часа − 3600 с.
Характерным для данной ситуации является изменение частоты колебаний регулируемой величины (которая представляет собой частоту вращения коленчатого вала главного двигателя), что можно наглядно проследить по форме переходного процесса (рис. 5).
Результаты исследования и их обсуждение
Переходный процесс, описанный на рис. 5, моделирует вход судна в район волнения с последующим изменением частоты воздействия с 0,05 Гц до 0,09 Гц, что может быть достигнуто посредством изменения глубины под килем судна [9]. Как видно из графика, постепенное увеличение амплитуды колебаний, связанное с рассогласованием времени появления воздействия и началом работы алгоритма, постепенно сменяется уменьшением амплитуды с одновременным увеличением частоты колебаний регулируемой величины в соответствии с возмущением.
Заключение
В результате проведенного исследования можно сделать вывод, что основным преимуществом использования данного метода корректировки регулирующего воздействия является снижение амплитуды колебаний регулируемой величины, что позволяет значительно повысить надежность и безотказность судовых технических средств в тяжелых условиях работы в районах северных широт, протяженность территорий которых для Российской Федерации значительна.
Библиографическая ссылка
Куколев А.А., Пиотровский Д.Л., Подгорный С.А., Спицын В.В. ОЦЕНКА КАЧЕСТВА ПАРАЛЛЕЛЬНОЙ РАБОТЫ ОБЪЕКТА УПРАВЛЕНИЯ И ЕГО МАТЕМАТИЧЕСКОЙ МОДЕЛИ НА ПРИМЕРЕ ГИБРИДНОЙ СИСТЕМЫ УПРАВЛЕНИЯ ЧАСТОТОЙ ВРАЩЕНИЯ СУДОВОГО ГЛАВНОГО МАЛООБОРОТНОГО ДВИГАТЕЛЯ ПРИ СИНУСОИДАЛЬНЫХ ВОЗМУЩАЮЩИХ ВОЗДЕЙСТВИЯХ // Современные наукоемкие технологии. 2022. № 12-2. С. 240-246;URL: https://top-technologies.ru/en/article/view?id=39466 (дата обращения: 02.08.2026).
DOI: https://doi.org/10.17513/snt.39466