


Scientific journal
Modern high technologies
ISSN 1812-7320
"Перечень" ВАК
ИФ РИНЦ = 1,279
BELLOWS ACTUATION MECHANISMS WITH A HYBRID CURVILINEAR CONTROL METHOD

В настоящее время во многих отраслях промышленности, особенно в медицинской технике, широко используются приводные механизмы криволинейного перемещения камерного типа, принцип действия которых основан на изменении геометрии камеры.
В механизмах, камеры которых выполнены в виде плоской искривленной трубки Бурдона [1] или гофрированной трубки [2], направление радиального криволинейного перемещения механизма задается, например, применением сильфона с разной боковой величиной гофр [3]. В этом случае перемещение рабочего органа по сформированной траектории осуществляется изменением величины давления рабочей среды в камере. Отсутствие возможности управления криволинейного перемещения в процессе работы ограничивает функциональные возможности устройств.
В механизмах, имеющих гибкую трубчатую структуру [4] с тягой, закрепленной со смещением относительно оси, способной согнуть трубчатую конструкцию, укоротив требуемую сторону, реализовано управление боковым направлением перемещения изгибной части. Требуемое радиальное направление перемещения рабочего органа в плоскости, перпендикулярной оси сильфона, задается смещением крепления тяги от оси в сильфонном приводном механизме (рис. 1, а). Рабочий орган от давления p1 среды питания сильфона перемещается в данном направлении на величину +Х1, -Y1, Z1 (рис. 1, б). Это позволяет расширить функциональные возможности устройств. В данном случае траектория изменения положения рабочего органа в направлении оси Z не управляется, что ограничивает функциональные возможности механизма.
Управление величиной осевого перемещения рабочего органа, например, в катетере осуществляют изменением длины тягового элемента. В этом устройстве тяговый элемент выполнен в виде плоской металлической проволоки. Трубчатая конструкция представляет собой ряд колец, соединенных с одной стороны с тяговым элементом, а с другой она оснащена распорками [5]. Недостатком данного механизма является то, что он обладает незначительными силовыми характеристиками.
Существенно расширяются возможности работы механизмов криволинейного перемещения [6], в которых имеется возможность управления траекторией в направлении осевого перемещения, используя для этого длину тяги и величину давления рабочей среды в камере сильфона (рис. 1, в). Даже при условии неизменной величины давления p1 в камере сильфона, изменение длины тяги l1 на l2 приводит к перемещению рабочего органа из координаты Z1 в Z2 .
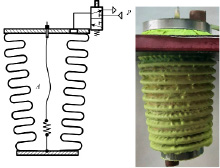
Данный метод работы реализован сильфонным приводным механизмом (рис. 2).
Регулировку траектории в осевом направлении выполняют изменением длины тяги.
Однако в перечисленных выше сильфонных приводных механизмах автоматизированное управление криволинейным перемещением осуществляют либо в радиальном, либо в осевом направлении, что снижает эффективность их работы.
Цель работы – расширение эффективности работы приводов криволинейного перемещения за счет использования комбинированного метода управления и устройства для его реализации.
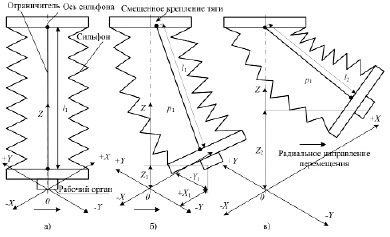
Рис. 1. Схема вариантов работы сильфонного приводного механизма: а) исходное положение; б), в) управление соответственно методами смещения крепления и длины тяги
а) б)
Рис. 2. Сильфонный приводной механизм с регулируемым осевым ограничителем: а) схема; б) общий вид
Материалы и методы исследования
Объектом исследования является функционирование пневматических приводов.
Предмет исследования – управление приводами криволинейного перемещения, имеющими камеру, выполненную с возможностью соединения с избыточным давлением рабочей среды с установленным в ней ограничителем осевого её удлинения.
Для решения поставленной задачи предложена идея комбинированного автоматизированного управления с одновременным регулированием криволинейного перемещения как в радиальном, так и в осевом направлении.
Данные идея и метод управления реализованы в новом приводе криволинейного перемещения, где по оси сильфона в крышке со стороны корпуса установлен шток управления приводом, соединенный с тягой и выполненный с возможностью осевого и радиального перемещения тяги, а крышка выполнена в виде торообразной гибкой нерастяжимой герметичной оболочки, соединенной одним концом с торцевой поверхностью сильфона, а другим с тягой.
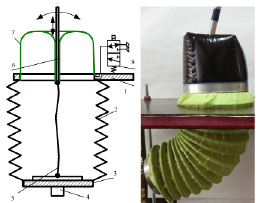
В данном механизме (рис. 3, а) на корпусе 1 установлен сильфон 2, торцевые поверхности которого закрыты двумя крышками, образуя герметичную полость А.
а) б)
Рис. 3. Сильфонный приводной механизм с комбинированным методом управления: а) схема; б) общий вид
На крышке 3 закреплен рабочий орган 4. В полости сильфона установлена гибкая нерастяжимая тяга 5, одним концом соединенная по оси с крышкой 3, а другим – со штоком управления 6, который охватывает герметичная гибкая нерастяжимая торообразная оболочка 7. Один конец оболочки закреплен на тяге 5, а другой – на торцевой поверхности сильфона и реализует функцию крышки, закрывающей торцевую поверхность сильфона со стороны корпуса. Герметичная камера А выполнена с возможностью соединения через распределитель 8 с давлением питания рабочей среды.
Применение торообразной оболочки устраняет необходимость герметизации подвижных соединений и разгружает механизм управления от силового воздействия на него со стороны ограничителя, улучшая технические характеристики механизма.
В исходном положении полость А соединена через распределитель 8 с атмосферой. Тяга 5 не оказывает силового воздействия на камеру сильфона. За счет упругости гофр он занимает симметричное относительно оси положение.
Перед началом работы задают требуемые направления радиального перемещения рабочего органа и его траекторию. Например, для перемещения рабочего органа против часовой стрелки, поворачивают шток управления, смещая в радиальном направлении тягу 5 вправо. Включением распределителя 8 соединяют линию питания воздуха с полостью А, создавая давление p1, величина которого не приводит к изменению радиального направления криволинейного перемещения рабочего органа.
Управляют траекторией по оси перемещения рабочего органа путем уменьшения осевой длины сильфона. При необходимости управления радиальным направлением криволинейного перемещения рабочего органа изменяют радиальное смещение тяги в соответствии с требуемым направлением, что приводит к повороту рабочего органа и устранению рассогласования его положения относительно заданного направления радиального смещения тяги.
Возможность дополнительно регулировать величину давления в камере расширяет возможности управления и существенно увеличивает разнообразие траекторий криволинейного перемещения. Кроме этого, данное устройство открывает возможность создания нового типа безнасосных сильфонных приводов криволинейного перемещения. Для подтверждения работоспособности и эффективности приводного механизма с комбинированным методом управления выполнено макетирование предлагаемых приводов.
Результаты исследования и их обсуждение
При макетировании и исследованиях применен конусный сильфон (пыльник амортизатора переднего М-2141). На рис. 4 показаны результаты натурных исследований работы сильфонного приводного механизма с комбинированным методом управления криволинейным перемещением.
Нулевая координата представляет собой осевую координату положения рабочего органа с сильфоном, в камере которого отсутствует давление питания рабочей среды, а также силовое воздействие на него тяги 5 (рис. 3, а).
а) б)
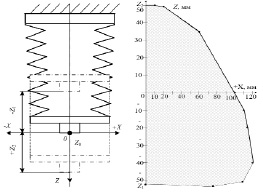
Рис. 4. Рабочая зона сильфонного приводного механизма криволинейного перемещения: а) расчетная схема; б) график пространства, в котором может находиться рабочий орган механизма
Крайнее верхнее положение -Z1 рабочий орган занимает при сжатом тягой положении сильфона, а координату +Z2 – в растянутом положении воздействием давления питания рабочей среды.
На рисунке показано перемещение рабочего органа только в направлении +Х. При криволинейном перемещении в направлении –Х зона возможных положений рабочего органа симметрична показанной на рис. 4, б.
Максимальное давление питания в рабочей камере составляет 0,1 атм. В плоскости, перпендикулярной оси сильфона, приводной механизм регулируется в диапазоне от 0 до 360°. Максимальный угол наклона рабочего органа относительно оси исследованного сильфона достигает ±90°.
График показывает, что комплексное управление криволинейным перемещением в осевом направлении и в плоскости, перпендикулярной ему, позволяет перемещать рабочий орган на расстояние по Х на ±120 мм, а по Z – на ±50 мм.
Заключение
Проведенный анализ современных методов управления приводными механизмами криволинейного перемещения позволил выявить отдельные недостатки, связанные с возможностями управления, которые ограничивают функциональные возможности механизмов. Метод комбинированного управления криволинейным перемещением позволяет устранить данные недостатки путем одновременного управления перемещением в радиальном и осевом направлении.
Описанный выше метод реализован новым устройством, в котором камера сильфона закрыта крышкой, выполненной в виде торообразной герметичной нерастяжимой оболочки, соединенной с механизмом управления траекторией криволинейного перемещения. Теоретические и экспериментальные исследования нового привода с комбинированным методом управления подтверждают его работоспособность и эффективность за счет существенного расширения рабочей зоны.
Библиографическая ссылка
Сысоев С.Н. СИЛЬФОННЫЕ ПРИВОДНЫЕ МЕХАНИЗМЫ С КОМБИНИРОВАННЫМ МЕТОДОМ УПРАВЛЕНИЯ КРИВОЛИНЕЙНОГО ПЕРЕМЕЩЕНИЯ // Современные наукоемкие технологии. 2022. № 5-2. С. 246-250;URL: https://top-technologies.ru/en/article/view?id=39178 (дата обращения: 24.06.2026).
DOI: https://doi.org/10.17513/snt.39178