


Scientific journal
Modern high technologies
ISSN 1812-7320
"Перечень" ВАК
ИФ РИНЦ = 1,279
BIOMECHANICAL STUDY OF SPORTS MOVEMENTS BY MEANS OF LOCAL POSITIONING IN CLOSED SPORTS FACILITIES USING AUTOMATED SCIENTIFIC RESEARCH SYSTEMS

В настоящее время в спорт высших достижений все больше внедряются современные технологии контроля и оценки биомеханических параметров спортсменов. Однако контроль перемещения и отслеживания кинематических характеристик зачастую основан на давно применяющихся и в некоторых случаях устаревших методиках. К ним можно отнести:
1. Оптические и лазерные датчики, фиксирующие пересечение объектом определенной линии в пространстве.
2. Средства видеоанализа, позволяющие захватить в кадр определенный участок или все спортивное поле целиком.
Вместе с тем одним из перспективных и непрерывно развивающихся методов локального позиционирования объектов в закрытых спортивных сооружениях является определение координат средствами общепринятой и широко используемой инфраструктуры WLAN. Преимуществами такого подхода можно считать достаточную точность для игровых видов спорта, относительную дешевизну используемого оборудования и отсутствие значимых препятствий для сигнала (например, со стороны других спортсменов).
Тем не менее определение точного положения и параметров движения спортсмена в крытых спортивных сооружениях в условиях отсутствия сигналов спутникового позиционирования (GNSS) является сложной научной проблемой. Сложность в первую очередь определяется собственными особенностями локомоций спортсменов разных видов спорта, минимальной задержкой определения позиции и параметров движения, а также сложностью подготовки исходных данных для позиционирования высокой точности.
Основанные на измерении времени прохождения сигнала и расчете по нему позиции объекта методы ТОА (Time of Arrival) и TDOA (Time Difference of Arrival) сложны в реализации из-за необходимости обеспечить синхронизацию работы приемника и передатчика.
Наиболее простым и приемлемым по точности является метод позиционирования по шаблону (Fingerprinting), когда для каждой точки поверхности измерений создается RSS (Received Signal Strength) карта, учитывающая мощность сигнала от видимых радиоисточников в каждой точке измеряемой поверхности [1, с. 7; 2, с. 256]. Во многих работах предлагается использовать готовые базы данных источников радиоизлучения, соответствующие каждому объекту [3, с. 83; 4, с. 207; 5, с. 20]. Однако такой подход требует поддержания этих баз в актуальном состоянии, что приводит к значительному повышению временных и финансовых затрат на подготовку измерений прежде всего за счет невозможности оперативного автоматизированного управления системой сбора и обработки научных данных. Кроме того, данный метод не всегда справляется с ситуациями, когда происходит внезапное отключение одного или нескольких источников излучения или их перемещение относительно исследуемого объекта [6, с. 2; 7; 8, с. 44].
Целью исследования было обосновать новую методику автоматизации технологии определения и расчета пространственных координат движущихся объектов при выполнении двигательной деятельности в закрытых сооружениях в процессе научных исследований спортивных движений.
Материалы и методы исследования
Для создания автоматизированной системы локального позиционирования объекта, в данном случае спортсмена, и биомеханических исследований спортивных движений использовалась существующая инфраструктура WLAN сети стандарта IEEE 802.11n, принимаемая в помещении крытого легкоатлетического манежа. Общее количество устойчивых источников сигнала на момент исследований от 7 до 12 с RSS -35…-70 dB в диапазоне 2,4 GHz. В качестве приемника использовался прибор собственной разработки на основе микропроцессора Tensilica Xtensa LX6 с дополнительным каналом передачи сигналов по протоколу LoRa-LAN (рис. 1), при этом встроенный в прибор тракт IEEE 802.11 использовался только на прием, а LoRa – для передачи данных на терминал исследователя [9].

Рис. 1. Фотография приемника сигнала собственной разработки
Результаты исследования и их обсуждение
В спортивной практике, в частности при биомеханических исследованиях, зачастую требуется с достаточной точностью определять положение того или иного объекта в некоем ограниченном пространстве. Например, в игровых видах спорта тренерскому составу часто приходится анализировать игру команды, опираясь только лишь на результаты видеосъемки. При этом далеко не всегда удается с приемлемой точностью определить положение на поле интересующего игрока. Причинами тому могут служить непопадание в кадр, заслон другими объектами, расфокусировка камеры и др. Предлагаемая методика автоматизации процесса определения локального положения биомеханических объектов позволяет повысить точность расчета пространственных координат. Также на основе первичных полученных данных могут быть произведены косвенные расчеты других биомеханических характеристик, таких как скорость или ускорение в определенный момент времени.
Для регистрации биомеханических составляющих локомоций объекта использовались два интегральных гироскопа-акселерометра MPU-9150, установленные перпендикулярно друг к другу. Перед началом работы проводилось сканирование диапазона 2,4 GHz, ранжирование видимых источников радиоизлучения по мощности принимаемого сигнала и их запоминание с идентификацией по SSID. Циклы контрольного сканирования источников проводятся три раза с интервалом 10 с, после чего для данного объекта текущее положение определяется как «0» виртуальной системы координат на плоскости для данного объекта (x’n, y’n), где n – номер маркера объекта в системе.
Дальнейшие локомоции спортсмена отслеживаются с дискретностью 0,1–1 с, в зависимости от требуемой точности и передаются на терминал исследователя по сети LoRa LAN. Передаваемая информация содержит текущее положение объекта на плоскости в виртуальной системе координат и информацию о биомеханических характеристиках локомоций спортсмена. При анализе локомоций спортсмена априори принято ограничение нахождения объекта внутри некоего контура измерений, определяемого размерами спортивной площадки (дорожки, сектора и т.д.), имеющего координаты (Xs, Ys). При выполнении условия x’n >Xs и y’n >Ys измерение считается недостоверным и исключается.
В исследовании использовалась площадка размером 20х20 м на базе легкоатлетического манежа Кубанского государственного университета физической культуры, спорта и туризма, 5 базовых источников излучения стандарта IEEE 802.11, идентифицированных по SSID и ранжированных по RSS. Доступ экспериментатора к управлению источниками сигнала отсутствовал.
Базовые измерения проводились по следующим аналитическим выражениям в соответствии с движением объекта по площадке (рис. 2).
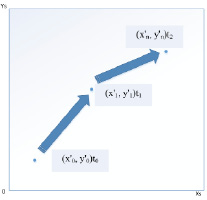
Рис. 2. Перемещение объекта по площадке
 (1)
(1)
 ,
,
где r – положение объекта в момент измерения.
Отсюда скорость объекта определяется как
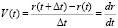 . (2)
. (2)
Дополняем рассчитанную скорость инерциальной составляющей
 , (3)
, (3)
где Id – инерциальный признак:
Id = 0 – объект не движется;
Id = 1 – объект движется.
Ускорение определяется как
 . (4)
. (4)
При этом с помощью акселерометра также определялся факт собственного движения объекта на плоскости. В данном случае факт физического движения объекта (спортсмена), а не возможное смещение источника излучения.
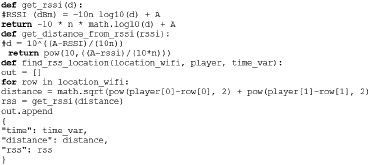
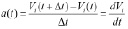
Рис. 3. Фрагмент алгоритма программы подсчета координат
При отсутствии факта собственного движения изменение координат объекта игнорируется. В процессе измерений проводилась фиксация положения объекта, мощность источников и соответствие рассчитанных координат источника координатам площадки.
Имели место частичные «выпадения» сигнала одного или нескольких базовых источников в процессе проведения измерения, при этом причины этого явления не выяснялись, а выпавшие измерения автоматически дополнялись программно с использованием алгоритма Метрополиса – Гастингса [1, с. 5–7], в котором посредством ранжирования по мощности сигнала рассчитываются недостающие положения в области отслеживания. Фрагмент программы с алгоритмом ранжирования представлен на рис. 3 [9].
При длительном (более 10 с) отсутствии сигнала от двух базовых источников из списка проводился сокращенный цикл сканирования и ранжирования работающих источников, обновлялся список, при этом последнее измерение с предыдущим набором источников становилось точкой нового отсчета положения объекта.
Недостающие требуемые биомеханические параметры локомоций объекта выводились и рассчитывались из основных формул кинематики:
 , (5)
, (5)
 . (6)
. (6)
Также при необходимости для автоматизации расчетов применялись компьютерные средства обсчета данных в Microsoft Excell.
В процессе обследования и тестирования группы футболистов и легкотлетов на базе легкоатлетического манежа Кубанского государственного университета физической культуры, спорта и туризма получена следующая точность измерений локальных координат:
– при использовании пяти базовых сигналов погрешность по обеим координатам составила 0,3 м, по скорости 0,71 м/с; при использовании меньшего количества базовых сигналов погрешность составляет 0,7 м и 0,95 м/с соответственно и более;
– при использовании семи базовых источников погрешность по обеим координатам составила 0,22 м и 0,6 м/с соответственно.
Заключение
Таким образом, применение перспективной и непрерывно развивающейся методики автоматизации процесса определения и расчета пространственных координат движущихся объектов позволит исследователям и тренерам получать более полную информацию о выполняемой спортсменами двигательной деятельности в закрытых спортивных сооружениях, а также автоматизировать технологию получения научных данных о биомеханических показателях. Об этом говорит распространенность используемой инфраструктуры, а следовательно, и доступность. Также значимым считаем тот факт, что при работе не происходит перекрытие обследуемого спортсмена другими объектами.
Как показали исследования, применение технологий сетей стандарта IEEE 802.11 для решения класса задач определения локального позиционирования (LPS) в биомеханических исследованиях с использованием аналитической коррекции результатов по данным инерциальных измерений RSS позволяет получить приемлемую точность результатов для спортивных игр и легкой атлетики.
Возможность получения и обработки результатов измерений в реальном масштабе времени непосредственно на объекте измерений открывает широкие возможности для повышения точности измерения биомеханических показателей спортивных локомоций и в некоторых других областях, например в навигации робототехнического оборудования и транспорте.
Библиографическая ссылка
Павельев И.Г., Остриков А.П., Костенко Е.Г., Алдарова Л.М. БИОМЕХАНИЧЕСКОЕ ИССЛЕДОВАНИЕ СПОРТИВНЫХ ДВИЖЕНИЙ СРЕДСТВАМИ ЛОКАЛЬНОГО ПОЗИЦИОНИРОВАНИЯ В ЗАКРЫТЫХ СПОРТИВНЫХ СООРУЖЕНИЯХ С ИСПОЛЬЗОВАНИЕМ АВТОМАТИЗИРОВАННЫХ СИСТЕМ НАУЧНЫХ ИССЛЕДОВАНИЙ // Современные наукоемкие технологии. 2021. № 12-2. С. 236-240;URL: https://top-technologies.ru/en/article/view?id=38981 (дата обращения: 12.07.2026).
DOI: https://doi.org/10.17513/snt.38981