


Scientific journal
Modern high technologies
ISSN 1812-7320
"Перечень" ВАК
ИФ РИНЦ = 1,279
PROCESSING OF BIOELECTRIC SIGNALS FOR CONTROL OF THE ACTIVE EXOSKELETON OF THE LEGS

Во многих областях все более возрастает потребность в использовании экзоскелетов. Медицина, строительство, военное дело – в этих направлениях, как и во многих других, зачастую требуется существенно увеличить физическую силу специалиста.
Условно экзоскелеты всех конструкций можно поделить на два типа: активные и пассивные:
- Активный – использует для работы приводы различных типов: электрические, пневматические, гидравлические и т.д. Соответственно, такой экзоскелет использует внешний источник питания для снятия нагрузки с оператора.
- Пассивный – в свою очередь, чаще всего использует пружинные уравновешивающие и поддерживающие устройства, предназначенные в первую очередь для равномерного распределения или же перераспределения нагрузки.
И если пассивный экзоскелет не снимает внешнюю нагрузку, а лишь распределяет ее, то активный с этой точки зрения более перспективен. И преимущество его со временем все более существенно, в связи с появлением все более энергоемких аккумуляторов. В дальнейшем, употребляя термин «экзоскелет», будет иметься в виду именно активный экзоскелет.
По назначению экзоскелеты делятся на несколько категорий:
1. Компенсирующие вес тела оператора.
2. Снимающие внешнюю нагрузку.
3. Комбинированные.
Первые чаще применяются в медицинской отрасли для реабилитации пациентов с повреждением опорно-двигательного аппарата. Вторые предназначены для увеличения грузоподъемности оператора, это может быть необходимо как для переноса груза, так и для использования одним человеком тяжеловесного оборудования. Третья категория обладает преимуществами и недостатками двух предыдущих, на практике используется для решения довольно узкого спектра задач.
Поскольку активный экзоскелет является системой с автоматическим управлением, он включает в себя два основных устройства теории автоматического управления, «объект управления» и «устройство управления».
Основной задачей этой работы является разработка устройства управления, основанного на датчиках биоэлектрической активности. А также реализация алгоритма перевода интенсивности сигналов с датчиков в управляющее воздействие на привод. В работе исследования направлены на разработку активного экзоскелета нижних конечностей для снятия внешней нагрузки.
Материалы и методы исследования
Экзоскелет для нижних конечностей будет состоять из трех электрических приводов, на каждый сустав соответственно, и набора датчиков, расположенных над основными мышцами, отвечающими за движение суставов.
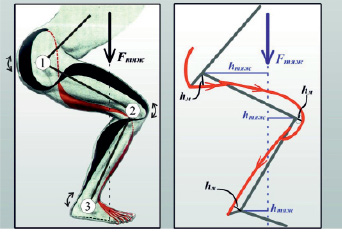
а) б)
Рис. 1. a) расположение суставов и направление степеней свободы (упрощенная модель); б) схема соединения костных звеньев
Человек сможет сохранять неподвижную позу (рис. 1, a), если момент силы тяжести, создаваемый вышерасположенными звеньями тела, будет уравновешен мышечным моментом [1], т.е. будет иметь место равенство
Fтяж×hтяж = Fм×hм, (1)
где Fтяж – сила тяжести,
hтяж – плечо силы тяжести,
Fм – сила тяги мышцы,
hм – плечо силы мышцы.
В реальности каждый сустав является скорее шаровым соединением, с некоторыми ограничениями по углам вращения, эта особенность используется чаще всего для поддержания равновесия. В задаче по снятию внешней нагрузки с оператора в динамике можно исходить из предположения, что один сустав имеет одну вращательную степень свободы. В общей сложности на одну ногу приходится три сустава с суммарно тремя степенями свободы, рис. 1, б.
Работа на перемещение человека в процессе его двигательной деятельности затрачивается на движение тела как целого, что может характеризоваться движением его общего центра масс (ОЦМ); движением отдельных частей тела относительно ОЦМ.
Так можно рассматривать и движение каждого звена тела человека. В связи с этим выражение для полной механической энергии Е может быть преобразовано следующим образом:
 (2)
(2)
где m – масса тела человека,
g – ускорение свободного падения,
h – высота ОЦМ над нулевым уровнем,
uоцм – абсолютная скорость ОЦМ,
mi – масса i-го звена,
 – скорость центра масс i-го звена относительно ОЦМ,
– скорость центра масс i-го звена относительно ОЦМ,
Ji – момент инерции i-го звена относительно мгновенной оси вращения,
ωi – мгновенная угловая скорость вращения i-го звена относительно мгновенной оси.
Первые два члена в правой части уравнения представляют полную механическую энергию движения ОЦМ. Поскольку за счет внутренних сил привести ОЦМ в движение невозможно (следствие из третьего закона Ньютона), вызвать движение ОЦМ могут только внешние силы, приложенные к многозвенной системе тела человека. Работу этих внешних сил называют внешней [2].
Необходимо определить зависимость движения каждого сустава от интенсивности напряжения определенных мышц ног. С точки зрения биомеханики ногу человека (от бедра до лодыжки) можно представить как несколько костных звеньев, подвижно соединенных в точках тазобедренного, коленного и голеностопного суставов. Анатомически мышцы ног могут быть разделены на 4 категории:
– Таз (ягодицы). Эти мышцы не совсем являются частью ноги. Но так как они крепятся к бедренной кости, то также участвуют в движении бедренного сустава. Данная мышечная группа располагается с задней стороны тела, в области между поясницей и бедром.
– Бедро. Начинается от тазовой кости (к которой некоторые мышцы крепятся) и заканчивается в области колена. К основным ее функциям относятся сгибание и разгибание голени и бедра. А также приведение ног к туловищу и их ротация. Условно эту группу делят на части. Переднюю, медиальную (внутреннюю) и заднюю.
– Голень. Это небольшие мышцы, занимающие нижнюю часть ноги. От колена до стопы. Нас интересует задняя группа. К ней относятся: трехглавая и подошвенная мышца. Все остальные мускулы отвечают за сгибание и разгибание пальцев. Поэтому рассматриваться не будут.
– Стопа. Это «опорные» мышцы, которые отвечают за равновесие. Мышцы, расположенные в стопе, в основном начинаются от голени и отвечают за движение пальцев, их сгибание и разгибание. А также движение в сторону относительно друг друга. И за повороты стопы. Выполняя действие, где требуется балансировка тела, они активно включаются [3].
Существуют различные классификации скелетных мышц: по внешней форме, функции, числу головок, положению, месту прикрепления, направлению мышечных волокон, строению и др.
По направлению мышечных пучков и их отношению к сухожилиям различают три типа мышц: параллельный, перистый и треугольный. В настоящее время различают веретенообразные, одноперистые и двуперистые мышцы. В веретенообразных мышцах пучки мышечных волокон располагаются параллельно длинной оси мышцы. Примером таких мышц являются: двуглавая мышца плеча, портняжная мышца, передняя большеберцовая мышца. При перистом ходе пучков мышечных волокон они располагаются под углом к длиннику мышцы. Примером перистых мышц являются прямая и латеральная широкая мышцы бедра, а также икроножная и камбаловидная мышцы [4].
Необходимое расположение датчиков для расчета управляющего воздействия на суставы (рис. 1, a) выбирается исходя из функционального назначения двигательных мышц:
1. Тазобедренный сустав:
I. Сгибание:
– Основное действие: гребенчатая мышца, портняжная мышца, прямая мышца бедра.
– Побочное действие: длинная приводящая мышца.
II. Разгибание:
– Основное действие: полусухожильная мышца, полуперепончатая мышца.
– Побочное действие: большая приводящая мышца.
2. Коленный сустав:
I. Сгибание:
– Основное действие: полусухожильная мышца, полуперепончатая мышца, двуглавая мышца, тонкая мышца, портняжная мышца.
– Побочное действие: икроножная мышца.
II. Разгибание:
– Основное действие: медиальная широкая мышца, промежуточная широкая мышца, латеральная широкая мышца, прямая мышца бедра.
3. Голеностопный сустав:
I. Сгибание:
– Основное действие: длинный разгибатель большого пальца стопы, передняя большеберцовая мышца.
– Побочное действие: короткая малоберцовая мышца, длинная малоберцовая мышца.
II. Разгибание:
– Основное действие: икроножная мышца, камбаловидная мышца.
– Побочное действие: длинный разгибатель пальцев, длинный разгибатель большого пальца стопы, длинный сгибатель большого пальца стопы, задняя большеберцовая мышца.
Миографический датчик в данной системе основан на неинвазивном сенсоре биоэлектрической активности [5]. Миографическое измерение биопотенциала производится двумя сигнальными электродами, расположенными вдоль исследуемой мышцы. После замеряется дифференциальная составляющая сигнала. На выходе датчика, после замера и фильтрации входного сигнала, имеется функция зависимости интенсивности биоэлектрического сигнала к напряжению. Для дополнительного усиления коэффициента ослабления синфазного сигнала в измерение был введен третий (нейтральный) электрод. Он располагается на участке тела, свободном от влияния биопотенциала исследуемой мышцы.
Поскольку измерение биопотенциала производится неинвазивным методом, то при измерении электрод охватывает совокупность биопотенциала всех мышц, расположенных под ним. Поэтому имеет смысл производить измерения на наиболее объемных мышцах, поскольку на слишком тонкие или глубоко расположенные будут наводиться помехи от других мышц. Расположение электродов для управления приводами (суставами), пронумерованными на рис. 1, а, необходимо подобрать с учетом этой особенности (рис. 2).

Рис. 2. Расположение электродов миографического сенсора
Так как некоторые мышцы выполняют смежные функции, для разработки алгоритма управления экзоскелетом необходимо описать влияние всех мышц, включенных в процесс анализа, на вращение каждого сустава, введя соответствующие коэффициенты коррекции влияния, для компенсации неоднородного воздействия.
На рис. 3 изображена схема, описывающая работу алгоритма, рассчитывающего управляющее воздействие на привод, в зависимости от интенсивности сигнала с датчиков биоэлектрической активности. Результирующее воздействие икроножной (№ 3) и прямой мышцы бедра (№ 5) взаимосвязано, однако зависимость не линейна. Поэтому на этапе учета интенсивности входного сигнала вводится коэффициент коррекции k, который подбирается индивидуально в зависимости от соотношения развитости икроножной и прямой мышцы бедра.
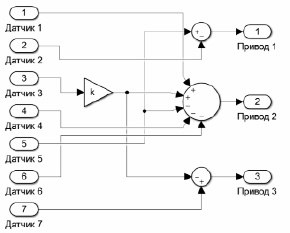
Рис. 3. Алгоритм распределения управляющего воздействия
Результаты исследования и их обсуждение
Исходя из первоначальных условий, система имеет на выходе датчиков биоэлектрической активности положительный, аналоговый сигнал, характеризующий интенсивность работы отслеживаемой мышцы. После обработки на вход контроллера привода поступает аналоговый, биполярный сигнал, характеризующий задающее воздействие скорости и направления вращения для каждого «сустава».
Поскольку измерение производится неинвазивным методом, то на интенсивность получаемого сигнала влияет как объем мышцы, так и глубина, на которой она располагается. Поэтому предусмотрена возможность независимого изменения коэффициента усиления для каждого датчика, что позволяет получить равное соотношение сигнала, зависимое только от интенсивности работы мышц.
Заключение
В работе разработан алгоритм, обрабатывающий совокупность полученных миографических сигналов и переводящих их в управляющие воздействие на привод экзоскелета.
Одним из способов теоретического повышения достоверности управляющего воздействия является использование электронного гироскопа для определения положения звеньев в пространстве и корректировки воздействия, с учетом силы притяжения, действующей на каждый из звеньев. Поскольку в момент неподвижного удержания, для противодействия силе тяжести, соответствующие мышцы находятся в напряжении, соответственно, полученный сигнал может быть неверно истолкован как задание на перемещение.
Библиографическая ссылка
Баталов А.В., Веселов О.В. ОБРАБОТКА БИОЭЛЕКТРИЧЕСКИХ СИГНАЛОВ ДЛЯ УПРАВЛЕНИЯ АКТИВНЫМ ЭКЗОСКЕЛЕТОМ НОГ // Современные наукоемкие технологии. 2021. № 5. С. 23-27;URL: https://top-technologies.ru/en/article/view?id=38652 (дата обращения: 12.07.2026).
DOI: https://doi.org/10.17513/snt.38652