


Scientific journal
Modern high technologies
ISSN 1812-7320
"Перечень" ВАК
ИФ РИНЦ = 1,279
NEURAL NETWORK TEMPERATURE CONTROL AT THE CONTROL POINT OF THE HEAD RECTIFICATION COLUMN OF THE ISOPRENE RECOVERY SYSTEM

Цель работы состоит в создании нейронной сети для стабилизации температуры в контрольной точке головной ректификационной колонны в производстве изопрена [1] при изменении расхода и состава питания. Для достижения цели решаются следующие задачи.
1. В программной среде UniSim Design Suite [2] создаются незатухающие колебания исследуемой системы и по известным методикам определяются оптимальные настроечные параметры регуляторов в заданном диапазоне изменения расхода и состава питания.
2. Выполняется анализ чувствительности оптимальных значений настроечных параметров регуляторов при воздействиях по расходу и составу питания в ректификационную колонну и выделяются контуры регулирования со значимой чувствительностью оптимальных настроечных параметров их регуляторов.
3. Для систем со значимой чувствительностью оптимальных настроечных параметров регуляторов выбирается структура нейронной сети и выполняется ее обучение по выборке, полученной в пункте 1.
4. Оценивается точность нейронной сети по значениям настроечных параметров регулятора, полученным при воздействиях со стороны расхода и со стороны состава питания в системе регулирования, при настройках регуляторами по типовой методике и с использованием нейронной сети.
5. Приводятся переходные процессы в системе регулирования температуры в контрольной точке колонны при воздействии на колонну изменением расхода питания с настройками регулятора, вычисленными по типовой методике, и с настройками регулятора, выданными нейронной сетью.
Колонна К-1 предназначена для стабилизации фракции пиролиза. Схема колонны представлена на рис. 1.
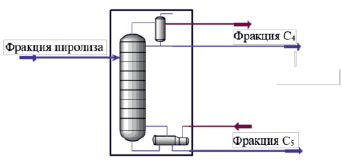
Рис. 1. Схема колонны К-1
Данная колонна является простой, состоит из 18 тарелок. В базовом режиме питающая смесь подается при температуре 49 °C и давлении 150 кПа на 9-ю тарелку. Температура в дефлегматоре – минус 6,5 °C. Температура в кубе – 39 °C. Моделирование статического режима работы колонны выполнялось с использованием программного продукта UniSim Design Suite. Материальный баланс колонны представлен в табл. 1.
Таблица 1
Материальный баланс
|
Название потока |
Массовый расход, кг/ч |
|
Питание |
13200 |
|
Дистиллят |
582 |
|
Кубовый продукт |
12618 |
Состав питания колонны К-1 представлен в табл. 2.
Целевым веществом является изопрен. В состав легкой фракции входят: бутадиен-1,3, бутен-1, н-бутан. Изопрен входит в тяжелую фракцию. Состав питания формировался путем варьирования доли одной из фракций в питании. При этом содержание индивидуальных компонентов задавалось по доле их содержания в соответствующей фракции базового состава питания. При моделировании базового статического режима ректификационной колонны содержание легкой фракции в кубовом продукте составляло 0,0001 мольной доли, паровой поток – 7100 кг/ч при флегмовом числе 33,9.
Таблица 2
Поток фракции пиролиза
|
Компонент |
Содержание (мольные доли) |
|
Бутадиен-1,3 |
0,041 |
|
Бутен-1 |
0,012 |
|
Н-бутан |
0,001 |
|
1,3-циклопентадиен |
0,018 |
|
Изопрен |
0,064 |
|
Цис-1,3-пентадиен |
0,077 |
|
Циклопентен |
0,258 |
|
Циклопентан |
0,018 |
|
2-метилбутен-1 |
0,257 |
|
Пентен-1 |
0,224 |
|
Изопентан |
0,027 |
|
Н-пентан |
0,002 |
|
Углеводороды С6 |
0,002 |
Схема системы управления колонной представлена на рис. 2.
Предполагается использование нейронной сети для определения настроечных параметров регулятора температуры в контрольной точке колонны со структурой, представленной на рис. 3. В качестве исходных данных на сеть поступают значения расхода и состава питания, а на выходе сети получают настроечные параметры регулятора. На схеме 2 нейронная сеть обозначена как математический преобразователь.
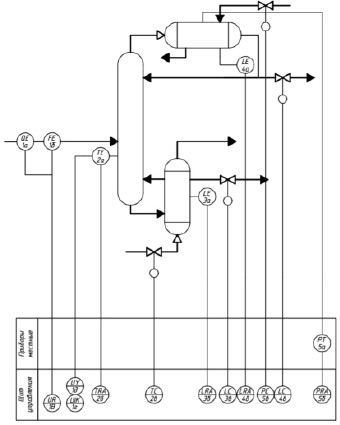
Рис. 2. Схема управления колонной К-1
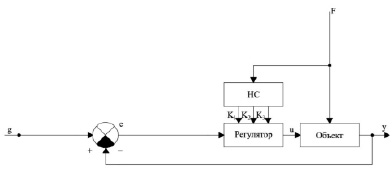
Рис. 3. Структурная схема САУ с использованием нейронной сети в качестве блока подстройки параметров регулятора
Рассмотрим ПИД-регулятор, уравнение динамики которого имеет вид (1):
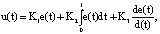 (1)
(1)
где K1, K2, K3 – коэффициенты усиления по пропорциональной, интегральной и дифференциальным составляющим соответственно.
Задача нейронной сети – определение оптимальных параметров K1, K2 и K3, при которых обеспечивается минимальная ошибка регулирования ε(t).
Известна положительная оценка применения такой системы для автоматического управления колонной экстрактивной ректификации [3].
В исследуемой системе управления колонной (рис. 2) значения оптимальных настроечных параметров регулятора давления в колонне, регулятора уровня во флегмовой емкости и регулятора уровня в ребойлере практически не изменялись при изменении расхода и состава питания в колонну. В связи с этим построение нейронной сети содержало следующие этапы:
1) определение контрольной точки в виде контрольной тарелки в колонне относительно оптимального статического режима при базовых значениях расхода и состава питания;
2) выбор критерия оптимальности переходного процесса в системе регулирования и определение оптимальных настроечных параметров ПИ – регулятора температуры на контрольной тарелке при скачкообразных воздействиях по расходу и составу питания относительно их выбранных значений из исследуемого диапазона расхода и состава питания;
3) выбор структуры нейронной сети, ее обучение и проверка точности.
Определение контрольной тарелки
В качестве контрольной была выбрана тарелка, температура на которой обладает наибольшей чувствительностью. Для примера отклонение температурного профиля по высоте колонны при уменьшении расхода питания на 2 % приведено на рис. 4.
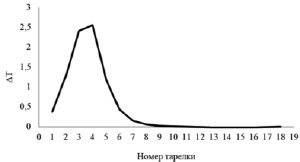
Рис. 4. Зависимость отклонения температур от номера тарелки при уменьшении расхода питания на 2 % от базового значения
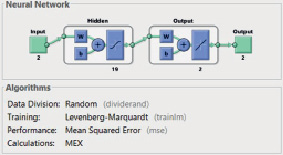
Рис. 5. Структура нейронной сети
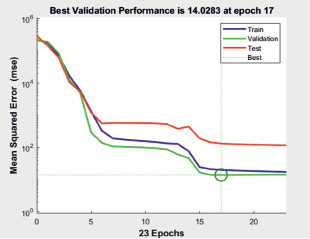
Рис. 6. Результат обучения нейронной сети
Аналогично качественная картина наблюдается и по другим каналам. 4-я тарелка выбрана в качестве контрольной. Ее значение в базовом режиме составило 17,383 °С.
Определение настроечных параметров регулятора выполнялось по методу Циглера–Никольса [4]. Суть метода заключается в экспериментальном исследовании замкнутой системы регулирования, состоящей из П-регулятора и объекта регулирования. Коэффициент передачи регулятора Кп варьируется до значения kкр, при котором система выходит на колебательную границу устойчивости с частотой ωк. Оптимальные значения настроечных параметров ПИ-регулятора при приемлемом значении величины перерегулирования и степени затухания на уровне до 0,75 выбираются из условий для ПИ-регулятора с передаточной функцией W = K1 + K0S, где K1 = 0,45kкр, K0 = 0,08kкрωкр. Для состояния колонны относительно базового статического режима получены: kкр = 161, ωкр = 94,25 1/мин. При этом воспроизведение колебательного процесса выполнялось в среде UNISIM, что явилось одним из предпочтений, сделанных в пользу выбранного метода определения оптимальных настроек.
Получение нейронной сети
Для получения обучающей выборки были определены оптимальные настроечные параметры ПИ-регулятора относительно 154 статических состояний колонны К-1. Для моделирования нейронных сетей использовался пакет Neural Networks Toolbox системы MATLAB [5]. Выбрана однонаправленная многослойная сеть, которая обучалась методом обратного распространения ошибки. Обучение сети выполнялось по алгоритму Левенберга–Маквардта [6], который, варьируя весовыми коэффициентами, минимизирует среднеквадратичную ошибку сети на обучающей выборке. Наилучший результат показала нейронная сеть, имеющая во внутреннем слое 19 нейронов. Структура данной нейронной сети представлена на рис. 5.
Нейронная сеть обучилась за 23 эпохи, среднеквадратичная ошибка выходных данных сети составила 14,03. Результат обучения представлен на рис. 6.
Результаты исследования и их обсуждение
Проверка точности нейронной сети представлена в табл. 3. В ней приведены настроечные параметры регулятора, полученные по методике вычисления оптимальных настроек и выданные нейронной сетью для 9 условий питания: для минимального расхода питания при минимальном, номинальном и максимальном содержании легколетучих компонентов в питании; для номинального расхода питания при минимальном, номинальном и максимальном содержании легколетучих компонентов в питании и для максимального расхода питания при минимальном, номинальном и максимальном содержании легколетучих компонентов в питании. Полученные данные представлены в табл. 3.
Таблица 3
Проверка нейронной сети
|
Расход питания, кг/ч |
Мольная доля легких компонентов |
Параметрический синтез |
Нейронная сеть |
||
|
Кп |
Ки, 1/мин |
Кп |
Ки, 1/мин |
||
|
10560 |
0,0504 |
68,4 |
1146,1 |
68,7 |
1148,2 |
|
10560 |
0,0531 |
69,3 |
1161,1 |
70,9 |
1169,3 |
|
10560 |
0,0558 |
70,7 |
1183,8 |
71,5 |
1178,2 |
|
13200 |
0,0504 |
71,6 |
1198,8 |
73,1 |
1199,0 |
|
13200 |
0,0531 |
69,8 |
1168,7 |
70,2 |
1177,3 |
|
13200 |
0,0558 |
69,5 |
1164,9 |
71,0 |
1156,4 |
|
13992 |
0,0504 |
110,7 |
1854,8 |
109,1 |
1862,5 |
|
13992 |
0,0531 |
109,4 |
1832,2 |
107,7 |
1827,0 |
|
13992 |
0,0558 |
108,5 |
1817,1 |
107,9 |
1820,2 |
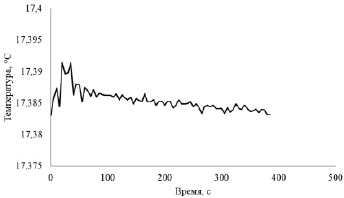
Рис. 7. Переходной процесс при настроечных параметрах ПИ-регулятора, полученных в результате параметрического синтеза системы регулирования температуры на контрольной тарелке
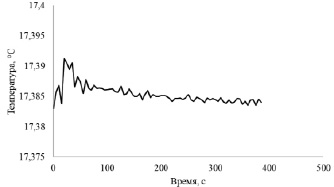
Рис. 8. Переходной процесс системы регулирования температуры на контрольной тарелке при настроечных параметрах ПИ-регулятора, полученных при помощи нейронной сети
Из таблицы следует, что нейронная сеть выдает значения настроечных параметров регулятора, близкие к значениям, полученным при параметрическом синтезе системы регулирования температуры на контрольной тарелке по известной методике. Это позволяет использовать ее как блок подстройки параметров регулятора температуры при изменении расхода и состава питания ректификационной колонны. Следует отметить, что оптимальные настроечные параметры регулятора значительно изменяются в рассматриваемом диапазоне расхода и состава питания. Оптимальное значение коэффициента К1 изменяется на 40 %, а коэффициента К0 – на 60 %. На рис. 7 представлен переходной процесс для возмущения по расходу питания в колонну относительно базового статического режима, полученный при использовании исходных настроечных параметров.
На рис. 8 показан переходной процесс системы регулирования температуры на контрольной тарелке при использовании настроечных параметров, полученных с помощью нейронной сети.
Выводы
Выполнен синтез системы оптимального управления температурой на контрольной тарелке головной ректификационной колонны в производстве изопрена с использованием методики, использующей эффективное моделирование динамических режимов ректификационной колонны в среде UNISIM, и разработана нейронная сеть для вычисления оптимальных настроечных параметров регулятора.
Для обучения нейронной сети получена выборка оптимальных настроечных параметров ПИ-регулятора относительно 154 оптимальных статических режимов, выбрана и обучена нейронная сеть.
Подтверждена высокая точность разработанной нейронной сети сравнением по предсказанным значениям настроек регулятора сетью с оптимальными значениями, вычисленными по типовой методике в широком диапазоне изменения расхода и состава питания.
Приведена иллюстрация переходных процессов в системе регулирования температуры на контрольной тарелке при настроечных параметрах ПИ-регулятора, полученных по типовой методике и при помощи нейронной сети. Сравнение переходных процессов, представленных на указанных рисунках, подтверждает их близость по виду и по количественной оценке.
Библиографическая ссылка
Кривошеев В.П., Конышев Н.А., Ефимов И.М., Смирнов А.Н. НЕЙРОСЕТЕВОЕ УПРАВЛЕНИЕ ТЕМПЕРАТУРОЙ В КОНТРОЛЬНОЙ ТОЧКЕ ГОЛОВНОЙ РЕКТИФИКАЦИОННОЙ КОЛОННЫ СИСТЕМЫ ВЫДЕЛЕНИЯ ИЗОПРЕНА // Современные наукоемкие технологии. 2021. № 2. С. 38-44;URL: https://top-technologies.ru/en/article/view?id=38491 (дата обращения: 02.08.2026).
DOI: https://doi.org/10.17513/snt.38491