


Scientific journal
Modern high technologies
ISSN 1812-7320
"Перечень" ВАК
ИФ РИНЦ = 1,279
POWER ANALYSIS OF THE MARKER CONTROL MECHANISM GRAIN DRILLS SUBM-3,6

Одним из критериев эффективного функционирования машинотракторных (МТА) агрегатов является обеспечение его работоспособного состояния. При этом работоспособность МТА в целом будет определяться работоспособностью его отдельных узлов и деталей [1, 2].
Эксплуатация сеялок СУБМ-3,6 в полевых условиях подтвердила в основном их высокую производительность, экономичность и оптимальность высева, повышение урожайности зерновых. Однако наряду с положительными результатами их использования были выявлены и ряд недостатков в конструкции сеялки. В частности, в механизме управления маркерами, предназначенными, для разметки ряда, по следам которого ориентируется оператор энергетического средства посевного МТА [3, 4], наблюдался повышенный износ шарниров крепления гидроцилиндров, а в отдельных – заклинивание шарниров гидроцилиндра c последующим выхода разрушением сварных соединений крепления его осей. Все это приводило к нарушению работоспособности не только механизма маркера, но и в целом всего посевного МТА.
В связи с этим появилась необходимость проверки усилий, возникающих в звеньях механизма маркера и его кинематических парах.
Цель исследования: анализ усилий, возникающих в звеньях механизма маркера зерновой сеялки СУБМ-3,6.
Материалы и методы исследования
Кинематическая схема маркера сеялки СУБМ-3,6 изображена на рис. 1, она включает гидроцилиндр 1 со штоком 2, которые служат для проведения в движение штанги 3 [5].
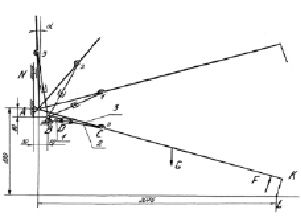
Рис. 1. Схема работы маркера (1-й вариант конструкции)
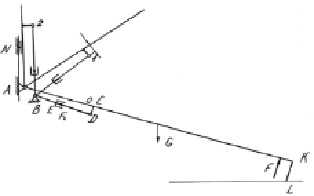
Рис. 2. Схема работы маркера (2-й вариант конструкции)
Искомые параметры определили известными методами кинетостатики путем использования графоаналитических способов [6]. Расчет проведен для двух вариантов схем, изображенных на рис. 1 и 2. Для первой из них выполним исследования для четырех положений механизма, а для второй для трех. В качестве внешних сил выступают силы: F = 0,500 кH и G = 0,15 кH [7].
Ведущим звеном данного механизма является цилиндр ВD. Осуществим расчленение ведомой кинематической цепи механизма на группы Ассура и проведем силовой расчет каждой группы Ассура. От механизма может быть отделена только одна группа Ассура 2 и 3, которая относится ко второму классу второго вида.
Составим уравнения равновесия группы, состоящей из звеньев 2 и 3. Первое уравнение примет вид
R03 + F + G + FС + R12 = 0. (1)
В этом уравнении содержится три неизвестных: R03, FC, R12. Для того чтобы решить, разложим реакцию R03, направленную перпендикулярно линии АК, и  , направленную параллельно линии АК. Теперь геометрическая сумма сил, приложенных к группе, рис. 3, определится выражением
, направленную параллельно линии АК. Теперь геометрическая сумма сил, приложенных к группе, рис. 3, определится выражением
 (2)
(2)
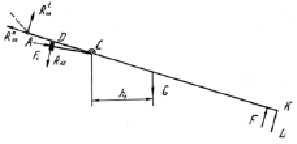
Рис. 3. Схема силового нагружения 2–3 звеньев (1-й вариант конструкции)
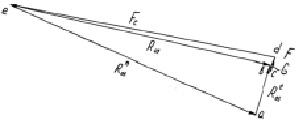
Рис. 4. План сил 2–3 звеньев (1-й вариант конструкции)
Для определения величины силы  , рассмотрим равновесие звена 3. Составим уравнение суммы моментов сил относительно точки С, приложенных к звену 3, тем самым исключим из него момент неизвестной реакции
, рассмотрим равновесие звена 3. Составим уравнение суммы моментов сил относительно точки С, приложенных к звену 3, тем самым исключим из него момент неизвестной реакции
 (3)
(3)
Уравнение (3) в развернутом виде примет вид
 (4)
(4)
где h3 = 0,5 м. Откуда

 кН.
кН.
Найдем значение силы R12 из управления равновесия звена 2.
 (5)
(5)
Проанализировав рис. 3, можно сделать вывод о том, что плечо силы FС отсутствует, а так как кроме этой силы больше никаких сил не приложено к звену DC, то R12 = 0 [6].
Строим план сил группы рис. 4 по равенству (2) в масштабе µF = 0,05 кH/мм.
Отложим от точки а силу
 мм.
мм.
От точки b в виде отрезка откладываем силу тяжести G в виде отрезка  мм, затем от точки с откладываем силу F в виде отрезка
мм, затем от точки с откладываем силу F в виде отрезка  мм.
мм.
Через точку а проведем линию перпендикулярно отрезку (ab) – это будет линия, действие силы  , а через точку d – прямую параллельную ВС. Она будет линией действия силы сопротивления FС. Находим точку пересечения с этих двух прямых.
, а через точку d – прямую параллельную ВС. Она будет линией действия силы сопротивления FС. Находим точку пересечения с этих двух прямых.
Определим числовое значение этих сил:
 кН;
кН;
 кН;
кН;
 кН.
кН.
Для определения реакции в шарнире составим векторное уравнение равновесия для звена 3:
R03 + G + F + R23 = 0. (6)
Из рис. 5, а, видно, что числовое значение R23 будет равно FС, т.е.
FС + R01 = 0. (7)
Из этого выражения следует, что FС = – R01, т.е. численно эти силы равны, а их направления противоположны (рис. 5, б).

Рис. 5. Схема силового расчета ведущего звена (1-й вариант конструкции): а) схема нагружения звена; б) план сил
Результаты исследования и их обсуждение
Результаты, полученные при вычислении реакций в опорах и силы сопротивления в разных положениях для первого варианта конструкции маркера, рис. 1, сведены в табл. 1.
Таблица 1
Числовые значения сил
|
№ положения |
R01, кН |
FС, кН |
R23, кН |
R03, кН |
|
0 |
9,45 |
9,45 |
9,45 |
9,50 |
|
1 |
19,70 |
19,70 |
19,70 |
19,75 |
|
2 |
15,25 |
15,25 |
15,25 |
15,30 |
|
3 |
27,60 |
27,60 |
27,60 |
27,65 |
Аналогичные расчеты проведем и для второго варианта конструкции маркера (рис. 2), т.е. найдем величины сил в опорах и силу сопротивления, но только в трех положениях, результаты сведем в табл. 2. При этом необходимые расчетные схемы силового расчета на примере 0-го положения маркера представлены на рис. 6–8.
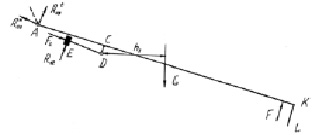
Рис. 6. Схема силового нагружения 2–3 звеньев (2-й вариант конструкции)
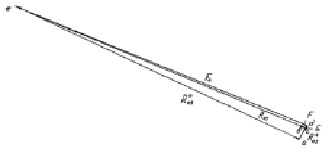
Рис. 7. План сил 2–3 звеньев (2-й вариант конструкции)
Таблица 2
Числовые значения сил
|
№ положения |
R01, кН |
FС, кН |
R23, кН |
R03, кН |
|
0 |
31,20 |
31,20 |
31,20 |
31,35 |
|
1 |
6,60 |
6,60 |
6,60 |
6,65 |
|
2 |
4,80 |
4,80 |
4,80 |
4,83 |
|
3 |
10,65 |
10,65 |
10,65 |
10,85 |
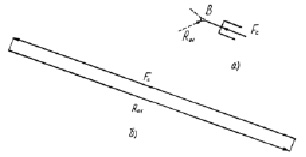
Рис. 8. Схема силового расчета ведущего звена (2-й вариант конструкции): а) схема нагружения звена; б) план сил
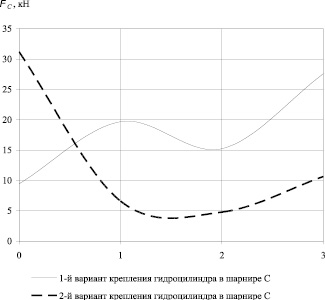
Рис. 9. График зависимостей сил в шарнире С крепления гидроцилиндра от положения маркера
По данным табл. 1 и 2 построим графики изменения силы FC в зависимости от положения маркера (рис. 9).
Из рис. 9 следует, что в кинематических парах механизмов обеих схем возникают значительные силы в шарнире C крепления гидроцилиндра. При этом максимальные значения силы составляют: для 1-го варианта крепления – 27,6 кН, а 2-го варианта – 31,2 кН.
Выводы
Исходя из расчетов, результаты которых приведены в табл. 1 и 2, и анализа графиков рис. 8 следует, что в кинематических парах механизмов обеих схем возникают значительные силы в верхнем шарнире (т. C) крепления гидроцилиндра. При этом максимальные значения силы составляют: для 1-го варианта крепления – 27,6 кН, а 2-го варианта – 31,2 кН. Все это может отрицательно сказываться на режимах работы маркера и приводить к повышенному износу в шарнирах, а в отдельных случаях – к их поломке. Кроме этого, сравнивая рассмотренные схемы, используемые в реальных механизмах, и значения сил, возникающих в шарнирах крепления гидроцилиндра, приходим к мнению о предпочтении первой из них. Поэтому при проектировании новых и совершенствовании существующих отдельных узлов и механизмов сельскохозяйственных машин и, в частности, рассмотренных механизмов маркера зерновой сеялки, необходимо учитывать не только их конкретные конструкции, но и их вариацию и различные условия функционирования.
Библиографическая ссылка
Купряшкин В.Ф., Шляпников М.Г., Безруков А.В., Князьков А.С., Купряшкин В.В., Осипов В.Ю. СИЛОВОЙ АНАЛИЗ МЕХАНИЗМА УПРАВЛЕНИЯ МАРКЕРОМ ЗЕРНОВОЙ СЕЯЛКИ СУБМ-3,6 // Современные наукоемкие технологии. 2019. № 12-1. С. 73-78;URL: https://top-technologies.ru/en/article/view?id=37836 (дата обращения: 03.07.2026).
DOI: https://doi.org/10.17513/snt.37836