


Scientific journal
Modern high technologies
ISSN 1812-7320
"Перечень" ВАК
ИФ РИНЦ = 1,279
ROBUST ALGORITHM OF NONPARAMETRIC IDENTIFICATION OF TECHNICAL SYSTEMS

Интегральные модели достаточно часто используются для описания и моделирования технических систем [1, с. 12–18]. Если система является стационарной (т.е. ее параметры не меняются во времени), то для ее описания применяется интегральное уравнение Вольтера I рода [2, с. 25–29]:
 (1)
(1)
где k(t) – импульсная переходная функция (ИПФ) системы;  – ее входной и выходной сигналы. Техническую реализуемость системы определяет условие
– ее входной и выходной сигналы. Техническую реализуемость системы определяет условие
k(t) = 0 при t < 0. (2)
Применительно к модели (1), задача непараметрической идентификации [2, 3] системы сводится к вычислению оценки для k(t) по измеренным значениям входного и выходного сигналов идентифицируемой системы.
Сформулированная задача идентификации некорректна, поскольку могут не удовлетворяться одно или несколько условий корректности по Адамару [4, с. 15–18; 5, с. 9]. Наиболее часто нарушается условие устойчивости решения к погрешностям (ошибкам) исходных данных, когда малые погрешности могут вызвать сколь угодно большие ошибки решения. Для построения устойчивых решений некорректных задач используются специальные методы регуляризации, как детерминированные [4, c. 38–56], так и статистические [5, c. 124–129]. В работе авторов [6] был построен эффективный алгоритм, вычисляющий оценку ИПФ из решения интегрального уравнения Вольтера II рода, что является уже корректно поставленной задачей. Однако при этом необходимо было вычислить первые производные от входного и выходного сигналов, что в свою очередь также является неустойчивой задачей. Для устойчивого вычисления этих первых производных использовались сглаживающие кубические сплайны (СКС). Применяемый алгоритм оценивания оптимального параметра сглаживания СКС (из условия минимума среднеквадратической ошибки сглаживания [5, с. 65–67]) позволил вычислять первые производные с приемлемыми ошибками, что обусловило устойчивое решение задачи идентификации даже при больших значениях погрешностей измерения выходного и входного сигналов идентифицируемой системы.
В ряде случаев зарегистрированные значения входного и выходного сигналов могут содержать аномальные измерения, которые значительно (в разы) отличаются от близлежащих измерений, и их появление можно объяснить наличием шумовой составляющей (импульсного шума), дисперсия которой существенно (на два и более порядков) отличается от дисперсии шумов измерений других значений сигналов. Аномальные измерения могут быть обусловлены сбоями в измерительной системе, канале связи, регистрирующей аппаратуре и т.п. К сожалению, СКС очень слабо сглаживает такие импульсные шумы, и это обуславливает большие ошибки в вычислении первых производных, что в свою очередь приводит к существенным ошибкам идентификации ИПФ динамической системы.
В данной работе предлагается новый двухшаговый алгоритм идентификации, на первом шаге которого эффективно фильтруются аномальные измерения (т.е. удаляется импульсный шум) с использованием пространственно-локальных фильтров, а на втором шаге осуществляется построение СКС по фильтрованным значениям входного и выходного сигнала, вычисления первых производных и построение устойчивого решения с использованием алгоритма, изложенного в работе [6]. Особое внимание уделяется оцениванию оптимальных параметров используемых алгоритмов обработки, что позволяет получать решения с наименьшей ошибкой идентификации.
Метод исследования
В работе [6] устойчивый алгоритм идентификации строится переходом от уравнения (1) к уравнению задачи идентификации, которое при выполнении условия (2) имеет вид
 (3)
(3)
Путем дифференцирования этого уравнения по переменной t и выполнения несложных преобразований, приходим к интегральному уравнению Вольтера II рода вида
 ,
,
 (4)
(4)
Для устойчивого дифференцирования зашумлённых входного и выходного сигналов идентифицируемой системы в работе [6] использовались сглаживающие кубические сплайны (СКС). Напомним, что функция Sφ(x) называется кубическим сплайном на интервале [0, T] с узлами
 , (5)
, (5)
если: а) на каждом отрезке  , функция Sφ(t) представляет собой полином третьей степени вида
, функция Sφ(t) представляет собой полином третьей степени вида
 (6)
(6)
б) функция Sφ(t) является дважды непрерывно дифференцируемой на всем интервале [0, T].
В работе [6] для устойчивого вычисления первых производных входного и выходного сигналов использовался естественный сглаживающий кубический сплайн – функция Sφ,α(t), которая одновременно удовлетворяет естественным краевым условиям относительно второй производной  и доставляет минимальное значение функционалу [5, с. 42–44; 7, с. 124–132]:
и доставляет минимальное значение функционалу [5, с. 42–44; 7, с. 124–132]:
 (7)
(7)
где  – весовые множители,
– весовые множители,  – значения функции φ(t) в узлах сетки (5), для которой строится СКС. В рассматриваемой задаче идентификации это зашумленные значения входного и выходного сигналов идентифицируемой системы. Меняя параметр сглаживания α в интервале
– значения функции φ(t) в узлах сетки (5), для которой строится СКС. В рассматриваемой задаче идентификации это зашумленные значения входного и выходного сигналов идентифицируемой системы. Меняя параметр сглаживания α в интервале  , можно менять ошибку сглаживания. Выбор параметра α из условия минимума среднеквадратической ошибки сглаживания рассмотрен в работах [5, 6]. Вычисление коэффициентов
, можно менять ошибку сглаживания. Выбор параметра α из условия минимума среднеквадратической ошибки сглаживания рассмотрен в работах [5, 6]. Вычисление коэффициентов  при заданном параметре α подробно изложено в [5, с. 45–49].
при заданном параметре α подробно изложено в [5, с. 45–49].
Рассмотрим поведение сглаживающего сплайна при наличии аномальных измерений (АИ). В качестве иллюстрации на рис. 1 сплошной линией показаны точные значения входного сигнала, точечной кривой – зашумленные значения (относительный уровень шума 10 %), штрих-точечной кривой – измеренные значения, содержащие АИ (вероятность появления АИ равна 0,02).
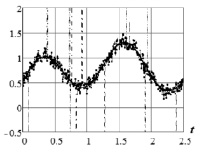
Рис. 1. Измеренные значения входного сигнала
На рис. 2 точечной кривой показаны значения СКС, построенного по измерениям, не содержащим АИ, штрих-точечная кривая – значения СКС, построенного по измерениям, содержащим АИ. Параметр сглаживания для этих двух сплайнов был одинаков и равен α = αW, где αW – оценка оптимального параметра сглаживания (подробнее см. [6]). Видно, что второй СКС содержит осцилляции, вызванные АИ, которые дадут существенные ошибки при вычислении первой производной и, соответственно, большую ошибку в решении уравнения (4). Неудовлетворительное сглаживание АИ обусловлено вторым слагаемым  функционала (7) (слагаемое называется функционалом невязки). Наличие квадрата разности
функционала (7) (слагаемое называется функционалом невязки). Наличие квадрата разности  «заставляет» сплайн «приближаться» к аномальному измерению и тем самым не удается эффективно сгладить данное АИ.
«заставляет» сплайн «приближаться» к аномальному измерению и тем самым не удается эффективно сгладить данное АИ.
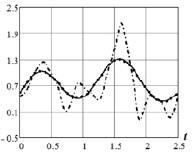
Рис. 2. Значения сглаживающих сплайнов
Для того чтобы сделать алгоритм идентификации нечувствительным (т.е. робастным) к АИ, возможны два подхода:
– заменить квадратичный функционал невязки в (7) на другой, аналогичный функционалу, используемому в методах робастного оценивания коэффициентов уравнения регрессии при наличии АИ (например, на сумму модулей);
– предварительно удалить (отфильтровать) АИ, а затем сгладить оставшийся шум сглаживающим кубическим сплайном.
Первый подход, когда строится робастный сглаживающий сплайн, достаточно сложен и трудоемок [8, 9]. Поэтому в данной работе предлагается робастный алгоритм идентификации, являющийся реализацией второго подхода.
Результат исследования. Робастный двухшаговый алгоритм идентификации
Предположим, что зашумлённые значения входного и выходного сигналов допускают следующие представления:
 (8)
(8)
где ξi, ηi – шумы измерения. Для статистического описания АИ введем следующие модели шумов ξi, ηi. Шум измерения входного сигнала ξi с вероятностью 1 – pξ имеет нулевое среднее и дисперсию  , а с вероятностью pξ – нулевое среднее и дисперсию
, а с вероятностью pξ – нулевое среднее и дисперсию  , где
, где  , т.е. с вероятностью pξ появляется импульсная составляющая шума измерения. Если эта вероятность равна нулю, то такой шум (без импульсной составляющей) будем называть однородным. Шум измерения выходного сигнала ηi с вероятностью 1 – pη имеет нулевое среднее и дисперсию
, т.е. с вероятностью pξ появляется импульсная составляющая шума измерения. Если эта вероятность равна нулю, то такой шум (без импульсной составляющей) будем называть однородным. Шум измерения выходного сигнала ηi с вероятностью 1 – pη имеет нулевое среднее и дисперсию  , а с вероятностью pη – нулевое среднее и дисперсию
, а с вероятностью pη – нулевое среднее и дисперсию  , где
, где  . На рис. 1 показаны АИ при pξ = 0,02 и Cξ = 400.
. На рис. 1 показаны АИ при pξ = 0,02 и Cξ = 400.
На первом шаге предлагаемого алгоритма идентификации осуществляется нелинейная фильтрация с использованием комбинированного фильтра (КФ) [10]. Его выходной сигнал определяется соотношением (при фильтрации входного сигнала):
 (9)
(9)
где  – результат фильтрации медианным фильтром (МФ), определяемый выражением
– результат фильтрации медианным фильтром (МФ), определяемый выражением
 (10)
(10)
где medL – функция, вычисляющая медиану из 2L + 1 значений, попавших в апертуру фильтра (указаны в скобках). Заметим, что МФ хорошо фильтрует импульсные шумы и сохраняет контрастные составляющие в отфильтрованном сигнале. Усреднение в КФ (сглаживание оставшихся однородных шумов) происходит только для значений  из интервала
из интервала  что предотвращает сглаживание контрастных составляющих точного сигнала. Таким образом, КФ устраняет импульсные шумы и успешно сглаживает однородные остаточные шумы, при этом размеры апертур удовлетворяют неравенству K ≥ L. Если величина K = 0, то КФ превращается в МФ. Если величина L = 0, то КФ превращается в интервальный фильтр скользящего среднего. Величину Δφ можно определить соотношением:
что предотвращает сглаживание контрастных составляющих точного сигнала. Таким образом, КФ устраняет импульсные шумы и успешно сглаживает однородные остаточные шумы, при этом размеры апертур удовлетворяют неравенству K ≥ L. Если величина K = 0, то КФ превращается в МФ. Если величина L = 0, то КФ превращается в интервальный фильтр скользящего среднего. Величину Δφ можно определить соотношением:  . Аналогичный КФ используется для фильтрации выходного сигнала.
. Аналогичный КФ используется для фильтрации выходного сигнала.
На втором этапе по отфильтрованным значениям входного  и выходного
и выходного  сигналов строятся сглаживающие кубические сплайны
сигналов строятся сглаживающие кубические сплайны  с производными
с производными  соответственно. Параметр сглаживания α выбирался на основе критерия оптимальности, приведенного в работе [6] и подробно рассмотренного в работе [5]. Этот критерий позволяет вычислить оценку αW для оптимального параметра сглаживания αopt, который минимизирует СКО сглаживания. После построения сплайнов и вычисления их первых производных формируется матрица Ф размером (N – 1)×(N – 1), элементы которой определяются как: при i < j, Фi,j = 0; при i ≥ j,
соответственно. Параметр сглаживания α выбирался на основе критерия оптимальности, приведенного в работе [6] и подробно рассмотренного в работе [5]. Этот критерий позволяет вычислить оценку αW для оптимального параметра сглаживания αopt, который минимизирует СКО сглаживания. После построения сплайнов и вычисления их первых производных формируется матрица Ф размером (N – 1)×(N – 1), элементы которой определяются как: при i < j, Фi,j = 0; при i ≥ j, 
 , где k = j – i. Сформированная матрица Ф позволяет аппроксимировать уравнение (4) системой линейных алгебраических уравнений (СЛАУ) вида (подробнее в работе [6]):
, где k = j – i. Сформированная матрица Ф позволяет аппроксимировать уравнение (4) системой линейных алгебраических уравнений (СЛАУ) вида (подробнее в работе [6]):
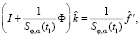 (11)
(11)
где I – единичная матрица размером (N – 1)×(N – 1), а вектор  составлен из значений первой производной выходного сигнала в узлах сетки. Решением этой системы будет вектор
составлен из значений первой производной выходного сигнала в узлах сетки. Решением этой системы будет вектор  , проекции которого являются оценками для значений
, проекции которого являются оценками для значений  ИПФ идентифицируемой системы.
ИПФ идентифицируемой системы.
Результаты численных исследований
Приведем некоторые результаты вычислительного эксперимента, выполненного для исследования точности идентификации предложенным алгоритмом. В качестве тестовой ИПФ была взята ИПФ, график которой показан сплошной кривой на рис. 3 (соответствует колебательному звену второго порядка). Значения выходного и входного сигналов искажались погрешностями, подчиняющимися нормальному распределению с относительными уровнями  , где
, где  – евклидова норма вектора, f, φ – векторы, составленные из точных значений выходного и входного сигналов,
– евклидова норма вектора, f, φ – векторы, составленные из точных значений выходного и входного сигналов,  – векторы зашумленных значений. В отсутствии АИ δφ = 0,10, δf = 0,10, при наличии аномальных измерений (pξ = 0,02, Cξ = 400, pη = 0,02, Cη = 400) – δφ = 0,358, δf = 0,421. На рис. 3 штрих-точечной кривой показаны значения ИПФ, вычисленные алгоритмом работы [6], когда сглаживающие сплайны строились по АИ и имели из-за этого большие ошибки сглаживания (см. штрих-точечную кривую рис. 2). После сглаживания СКС имеем относительные уровни ошибок сглаживания δφ = 0,311, δf = 0,591. В этом случае относительная ошибка идентификации
– векторы зашумленных значений. В отсутствии АИ δφ = 0,10, δf = 0,10, при наличии аномальных измерений (pξ = 0,02, Cξ = 400, pη = 0,02, Cη = 400) – δφ = 0,358, δf = 0,421. На рис. 3 штрих-точечной кривой показаны значения ИПФ, вычисленные алгоритмом работы [6], когда сглаживающие сплайны строились по АИ и имели из-за этого большие ошибки сглаживания (см. штрих-точечную кривую рис. 2). После сглаживания СКС имеем относительные уровни ошибок сглаживания δφ = 0,311, δf = 0,591. В этом случае относительная ошибка идентификации  была равна 1,258, которая говорит об очень плохой точности идентификации.
была равна 1,258, которая говорит об очень плохой точности идентификации.
Приведем некоторые количественные характеристики предлагаемого двухступенчатого алгоритма идентификации. После выполнения на первом шаге фильтрации с использованием КФ относительные уровни остаточных шумов были равны: δφ = 0,052, δf = 0,061. Сравнивая с уровнями шумов исходных сигналов (δφ = 0,358, δf = 0,421), видим существенное уменьшение уровней шума и удаление импульсных составляющих. После сглаживания СКС остаточного шума имеем: δφ = 0,038, δf = 0,049. На рис. 3 точечной кривой показаны значения ИПФ, вычисленные двухшаговым алгоритмом идентификации, при этом относительная ошибка идентификации составила δk = 0,138. Заметим, что относительная ошибка идентификации алгоритмом работы [6] при отсутствии аномальных измерений была равна 0,131.
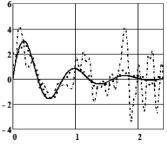
Рис. 3. Импульсная переходная функция и ее оценки
Заключение
Предложенный двухшаговый алгоритм идентификации позволяет решать задачу идентификации с приемлемой точностью даже при наличии в измеряемых сигналах идентифицируемой системы импульсного шума. Отчасти это обусловлено тем, что матрица СЛАУ хорошо обусловлена (число обусловленности зависит от полосы спектра мощности входного сигнала и чаще всего не превышает 1000), и поэтому ошибки, возникающие при дифференцировании выходного сигнала, оказывают существенно меньшее влияние на точность построенного решения по сравнению с ошибками правой части уравнения (3), решаемого с использованием регуляризирующего алгоритма на основе дискретного преобразования Фурье [5]. Следует отметить, что общие затраты машинного времени на построение решения предложенным алгоритмом возрастают (из-за пространственно-локальной фильтрации) незначительно и это увеличение составляет примерно 25–30 %.
Библиографическая ссылка
Воскобойников Ю.Е., Боева В.А. РОБАСТНЫЙ АЛГОРИТМ НЕПАРАМЕТРИЧЕСКОЙ ИДЕНТИФИКАЦИИ ТЕХНИЧЕСКИХ СИСТЕМ // Современные наукоемкие технологии. 2019. № 11-1. С. 38-42;URL: https://top-technologies.ru/en/article/view?id=37762 (дата обращения: 03.07.2026).