


Scientific journal
Modern high technologies
ISSN 1812-7320
"Перечень" ВАК
ИФ РИНЦ = 1,279
ESTIMATION OF POSITIONING ERROR CHARACTERISTICS OF COMBINED GLONASS / GPS RECEIVERS

В настоящее время приемники глобальных навигационных спутниковых систем навигации (GNSS – Global Navigation Satellite System) гражданских потребителей различного назначения в основном обеспечивают обработку сигналов одного спутникового созвездия – системы ГЛОНАСС (Россия) или GPS (США), принимаемых на одной частоте диапазона L1. Это в ряде случаев не обеспечивает требуемую точность, надежность, доступность, целостность и функциональную готовность системы навигации [1]. Получение дополнительных эксплуатационных выгод от применения спутниковых навигационных технологий станет возможным при одновременном использовании в GNSS созвездий навигационных спутников (НС) GPS и ГЛОНАСС, а в перспективе – еще и систем Compass (Китай) и Galileo (Евросоюз). Приемники GNSS, позволяющие работать по одному или нескольким созвездиям навигационных спутников (НС), называют комбинированными (мультисистемными).
Комбинированные GPS/ГЛОНАСС приемники давно и успешно реализуются на рынке профессиональной аппаратуры, например в геодезической аппаратуре, в авиационных приемниках российского производства (СН-4312, А-737 и др.). Рассматривается использование комбинированного (совмещенного) режима и для улучшения функции контроля целостности в приемнике – ARAIM (Advanced Receiver Autonomous Integrating Monitoring) [2]. Использование комбинированных GNSS приемников, вместе с переходом к работе в двухчастотном режиме (DFMC), является одним из элементов дорожной карты в области навигации, содержащейся в Глобальном аэронавигационном плане и других документах Международной организации гражданской авиации ИКАО [3].
Работа GNSS приемника в совмещенном режиме обеспечивает лучшие условия навигационного сеанса, под которыми будем понимать геометрический фактор (GDOP – Geometrical Dilution Of Precision) – параметр, который зависит от числа и расположения относительно потребителя НС рабочего созвездия (по сигналам которых выполняются навигационные определения) [4]. Очевидное преимущество комбинированного приемника заключается в способности принимать большое число сигналов от НС различных систем, что обеспечивает повышенную вероятность местоопределений при затрудненных условиях приема, например при затенениях сигналов рельефом местности, высотными зданиями и сооружениями, в сложной помеховой обстановке. В ряде случаев можно ожидать также и повышение точности определения координат за счет избыточности измерений псевдодальностей до НС.
ГЛОНАСС и GPS отличаются параметрами орбитальных группировок, структурой сигналов, точностью эфемеридного обеспечения, используемыми моделями земного эллипсоида. Это приводит к существенным различиям в схемных построениях радиочастотных трактов приемников, алгоритмов обработки информации. Важно отметить, что внедрение и сертификация комбинированных GNSS приемников для использования в коммерческой авиации в соответствии со стандартами и рекомендуемой практикой (SARPs) ИКАО должно базироваться на оценке характеристик погрешностей навигационных определений, обеспечиваемых в различных условиях функционирования приемников. Поэтому представляет интерес исследование характеристик погрешностей позиционирования комбинированных приемников при работе как по отдельным системам, так и в совмещенном режиме.
Известны результаты исследований, показавших, что работа в совмещенном режиме может привести к ухудшению точности позиционирования по сравнению с работой только по GPS [5], несмотря на значительное улучшение GDOP. В других работах, например [6, 7], применительно к условиям плотной городской застройки, холмистой местности отмечено отсутствие существенного повышения точности, несмотря на улучшение в ГЛОНАСС/GPS режиме доступности местоопределений и их избыточности, желательной для повышения надежности навигации.
Таким образом, цель представленной работы состоит в исследовании характеристик погрешностей позиционирования (мгновенной и среднеквадратической погрешности (СКП) определения координат) в режимах работы GNSS приемника по ГЛОНАСС, GPS, ГЛОНАСС/GPS при различных условиях навигационного сеанса.
Проведение таких исследований является актуальной научно-практической задачей, решение которой позволит получить практические рекомендации по обоснованию характеристик погрешностей комбинированного GNSS приемника.
Материалы и методы исследования
Для проведения исследований использовался приемник Геос-1М (ООО «КБ «ГеоСтар навигация»). Приемник может работать по системам ГЛОНАСС и GPS отдельно, а также в совмещенном ГЛОНАСС/GPS режиме. При этом возможно использование режима динамической фильтрации выходной информации приемника.
Эксперименты проводились в двух пунктах, один (п. А) располагался на открытой местности (координаты 52,09 ° с.ш., 104,35 ° в.д., высота 500,05 м), второй (п. Б) – в городской черте (координаты 52,27 ° с.ш., 104,36 ° в.д., высота 466,15 м). Расстояние между пунктами составило 18,6 км, что обеспечивало практически совпадающие орбитальные группировки спутников, находящихся в зоне видимости. Однако при навигационных определениях в п. Б часть НС оказывалась в зоне затенения из-за наличия высотных зданий вблизи расположения антенны, вследствие чего прием сигналов от них был невозможен. Кроме этого, в п. Б мог присутствовать эффект многолучевого приема.
В процессе измерений фиксировались координаты приемника, количество и номера НС рабочего созвездия, вертикальный VDOP и горизонтальный HDOP геометрические факторы. Измерения проводились с дискретностью 1 с на интервале наблюдения 8 суток. По полученному ряду измерений проводилась статистическая обработка данных позиционирования с целью определения СКП измерений каждой из координат согласно выражению
где N – число измерений, xi – измеренное приемником на i-м шаге значение координаты,  – оценка истинного значения координаты приемника.
– оценка истинного значения координаты приемника.
Преобразование погрешностей позиционирования в метрическую систему отсчета осуществлялось в соответствии с выражениями
δBi = (Bi – mB)·(a + H), δLi = (Li – mL)·(a + H)·cosB0,
где δBi, δLi – погрешности измерения соответственно широты и долготы на i-м шаге измерений; Bi, Li – координаты приемника, измеренные на i-м шаге, mB, mL – оценки истинных координат (широты и долготы) приемника; a = 6378245 м – большая полуось земного эллипсоида; H – высота антенны приемника над поверхностью земного эллипсоида.
С помощью средств среды программирования LabView осуществлялось формирование выходной информации в виде графиков изменения геометрических факторов, числа наблюдаемых НС, мгновенных значений погрешностей и СКП измерений, гистограмм распределения погрешностей позиционирования.
Результаты исследования и их обсуждение
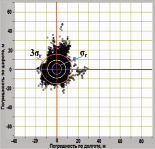
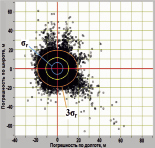
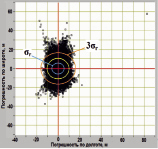
Результаты исследований погрешностей позиционирования в виде диаграмм рассеяния их мгновенных значений по широте и долготе представлены на рис. 1.
Диаграммы а, б, в – получены для п. А, диаграммы г, д, е – для п. Б. На диаграммах показаны окружности, соответствующие предельной (3σr), максимальной (2σr) и среднеквадратической (σr) погрешностям определения местоположения, где 
Представленные результаты показывают, что погрешности позиционирования максимальны в режиме ГЛОНАСС (рис. 1, а, разброс мгновенных значений погрешности по широте до 50 м) уменьшаются в режиме GPS (рис. 1, б, разброс до 30 м) и минимальны при работе в совмещенном режиме (рис. 1, в, не превышают 20 м). Погрешности позиционирования возрастают в 1,5–2 раза при работе приемника в городских условиях, причем степень рассеяния погрешностей при работе по ГЛОНАСС (рис. 1, г) значительно выше, чем в остальных режимах. Можно также отметить, что при работе по GPS (рис. 1, б, рис. 1, д) характерен эффект большего разброса мгновенных значений погрешностей по широте, который становится менее выраженным при работе в совмещенном режиме (рис. 1, в, рис. 1, е).
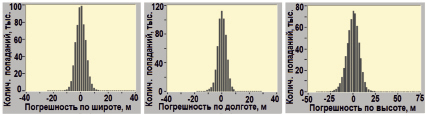
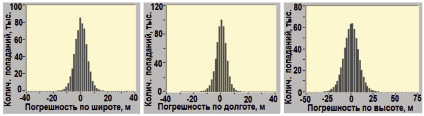
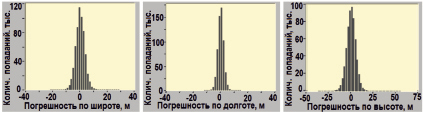
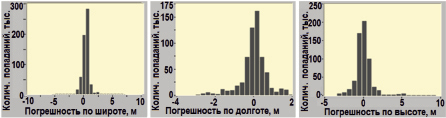
На рис. 2 показаны гистограммы распределения ошибок позиционирования соответственно по широте, долготе и высоте в режимах работы приемника: ГЛОНАСС в п. А (диаграммы а, б, в); в п. Б (диаграммы г, д, е), ГЛОНАСС/GPS в п. Б (диаграммы ж, з, и).


а) б) в)

г) д) е)
Рис. 1. Диаграммы рассеяния мгновенных значений погрешностей позиционирования
а) б) в)
г) д) е)
ж) з) и)
Рис. 2. Гистограммы распределения погрешностей определения координат
Анализ полученных результатов показывает, что во всех случаях закон распределения погрешностей определения координат близок к гауссовскому с нулевым математическим ожиданием. Аналогичный закон распределения погрешностей определения координат наблюдался и при работе в режиме GPS. Таким образом, при разработке математических моделей случайных погрешностей позиционирования GNSS приемников закон их распределения можно считать гауссовским.
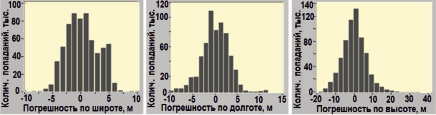
На рис. 3 показаны гистограммы распределения ошибок позиционирования в п. Б соответственно по широте, долготе и высоте при включенной динамической фильтрации в режиме работы приемника ГЛОНАСС (диаграммы а, б, в) и ГЛОНАСС/GPS (диаграммы г, д, е).
Как видно из представленных диаграмм, при включении режима динамической фильтрации степень соответствия распределения погрешностей определения координат гауссовскому закону снижается. Этот эффект следует учитывать при построении моделей погрешностей позиционирования GNSS приемника при включении дополнительных опций по обработке выходной информации (в данном случае – динамической фильтрации).
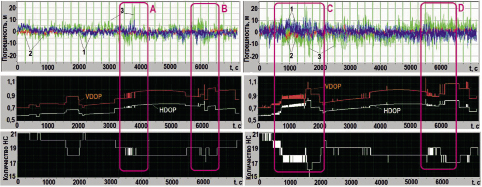
На рис. 4 представлены результаты экспериментов, проведенных при синхронной работе приемников Геос-1М в режиме ГЛОНАСС/GPS, размещенных в пунктах А (рис. 4, а) и Б (рис. 4, б). На рисунках показаны реализации погрешностей определения координат (1 – широта, 2 – долгота, 3 – высота), а также графики, характеризующие изменение горизонтального HDOP и вертикального VDOP ГФ и количество НС, измерения псевдодальностей до которых включены в обработку при решении навигационной задачи.
На рассматриваемом интервале времени в п. А в среднем наблюдалось 19,12 НС (от 17 до 21), в п. Б – 18,41 НС (от 15 до 21). Прослеживается влияние величины ГФ на значения погрешностей позиционирования, а также очевидная зависимость величины ГФ от числа наблюдаемых НС. При этом нестабильность слежения за отдельными НС (области А, B, C, D на рисунках) приводит к заметному возрастанию мгновенных значений погрешностей позиционирования.
Обобщенные результаты проведенных экспериментов представлены в таблице.
а) б) в)
г) д) е)
Рис. 3. Гистограммы распределения погрешностей при динамической фильтрации
а) б)
Рис. 4. Результаты экспериментов при различных условиях размещении приемника
Обобщенные результаты экспериментов
|
ГЛОНАСС |
GPS |
ГЛОНАСС/GPS |
||||
|
п. А |
п. Б/д.ф.* |
п. А |
п. Б/д.ф. |
п. А |
п. Б/д.ф. |
|
|
СКП широты, м |
3,58 |
4,73/2,83 |
2,86 |
4,81/0.41 |
2,29 |
3,31/0.53 |
|
СКП долготы, м |
3,07 |
3,99/3,04 |
1,83 |
2,7/0.36 |
1,57 |
2,13/0.63 |
|
СКРП, м |
4,7 |
6,2/4,15 |
3,4 |
5,5/0,55 |
2,8 |
3,9/0,82 |
|
СКП высоты, м |
6,82 |
8,72/6,32 |
4,92 |
7,05/0.44 |
3,88 |
5,23/1.02 |
|
Среднее число НС |
8,58 |
7,89 |
10,04 |
9,77 |
18,55 |
17,61 |
|
Средний VDOP |
1.39 |
1.52 |
1.26 |
1.29 |
0.87 |
0.9 |
|
Средний HDOP |
1.09 |
1.21 |
0.93 |
0.96 |
0.66 |
0.69 |
Примечание.* д.ф. – включен режим динамической фильтрации.
Анализ полученных результатов показал следующее:
– точность определения местоположения составила 4,7 м (режим ГЛОНАСС), 3,4 м (режим GPS) и 2,8 м (режим ГЛОНАСС/GPS). Работа в совмещенном режиме повысила точность определения местоположения на 40 % (высоты – на 43 %) по сравнению с ГЛОНАСС, и на 18 % (высоты – на 21 %) по сравнению с GPS;
– работа в городских условиях привела к ухудшению точности определения местоположения на 34 % (режим ГЛОНАСС), 62 % (режим GPS) и 39 % (режим ГЛОНАСС/GPS). При этом ухудшение горизонтального ГФ HDOP составило соответственно 11 %, 2 % и 5 %, а уменьшение среднего количества наблюдаемых спутников 8; 3 и 4,5 %;
– использование режима динамической фильтрации привело к повышению точности в 1,5 раза (режим ГЛОНАСС), в 10 раз (режим GPS) и 4,8 раза (режим ГЛОНАСС/GPS).
Заключение
В результате проведенных исследований получены оценки характеристик точности и особенностей работы ГЛОНАСС/GPS приемника в различных режимах работы и условиях применения. Полученные результаты подтверждают возможность аппроксимации погрешностей позиционирования GNSS приемника в задачах синтеза алгоритмов оптимальной обработки информации случайным процессом с гауссовским законом распределения.
Экспериментально подтверждено, что работа в совмещенном режиме обеспечивает значительное повышение точности позиционирования по сравнению с работой по ГЛОНАСС и достаточно существенное по сравнению с работой по GPS. Важным для практики является тот факт, что режим GPS более критичен к работе в городских условиях, хотя при этом условия навигационного сеанса (значение ГФ и количество наблюдаемых НС) изменяются несущественно. Применение режима динамической фильтрации в приемнике Геос-1М наименее эффективно при работе в режиме ГЛОНАСС, что может быть связано с наличием в погрешности позиционирования составляющих, не учитываемых в используемом алгоритме динамической фильтрации.
Работа выполнена при финансовой поддержке проектов РФФИ грант № 19-08-00010.
Библиографическая ссылка
Скрыпник О.Н., Арефьев Р.А., Арефьева Н.Г. ОЦЕНКА ХАРАКТЕРИСТИК ПОГРЕШНОСТЕЙ ПОЗИЦИОНИРОВАНИЯ КОМБИНИРОВАННЫХ ГЛОНАСС/GPS ПРИЕМНИКОВ // Современные наукоемкие технологии. 2019. № 10-2. С. 296-301;URL: https://top-technologies.ru/en/article/view?id=37740 (дата обращения: 03.07.2026).