


Scientific journal
Modern high technologies
ISSN 1812-7320
"Перечень" ВАК
ИФ РИНЦ = 1,279
ACCOUNTING OF MENTAL PROPERTIES OF INTELLIGENT AGENTS IN THE MODEL OF A HYBRID AUTOMATIC

Одним из основных путей цифровизации общества является внедрение киберфизических и киберсоциальных систем, а также комплексных киберфизических-социальных системы [1, 2]. Главным направлением исследований в этой области является создание мультиагентных систем, состоящих из цифровых двойников, имитирующих поведение и взаимодействие реальных интеллектуальных агентов и других объектов среды обитания [3, 4].
Особый интерес данная задача представляет для разработки цифровой платформы стратегического развития «умного города». В основу платформы должны быть положены модели, учитывающие динамическую актуализацию и исполнение потребностей различных типов стейкхолдеров (агентов) города, а также других динамических и статических объектов городской и взаимодействующей внешней среды. Такого типа модели относятся к классу гибридных непрерывно-дискретных систем, состоящих из большого числа распределенных и параллельно функционирующих элементов различной природы, поведение которых описывается непрерывными процессами, имеющими конечную длительность, и элементов, поведение которых описывается дискретными процессами, время реакции на события в которых несущественно для анализа системы [5].
Целью данной работы является формализация жизни интеллектуальных агентов на основе модели гибридного (непрерывно-дискретного) автомата [5–7], которая может быть использована для описания процессов поведения и развития агентов, обладающих определенными наборами потребностей, ресурсов и средств их реализации.
В простейшем случае цифровой двойник интеллектуального активного агента, действующего в определенных условиях внешней среды, может быть представлен следующей структурой (рис. 1).
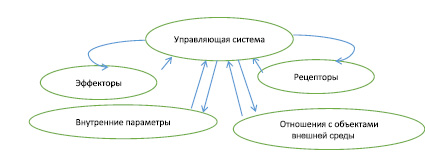
Рис. 1. Структура интеллектуального агента
Эффекторы – модели средств перемещения агента и выполнения различных физических действий над самим собой и объектами внешней среды, т.е. его физические возможности, рецепторы – приемники информации о состоянии среды. Внутренние параметры определяются процессами, происходящими внутри агента.
Управляющая система занимается планированием удовлетворения потребностей и управляет эффекторами и рецепторами. В ней формируется реестр потребностей, определяются приоритеты их исполнения и порядок использования эффекторов и рецепторов. В каждый момент времени эффекторы, рецепторы, управляющая система могут находиться как минимум в одном из трех состояний: свободен, занят (участвует в выполнении действия) и неработоспособен.
Как известно [8], цикл реализации потребности включает этапы генерации, актуализации обстановки, выбор пути реализации потребности и, собственно, ее удовлетворение. В качестве модели выбора пути исполнения потребности агента, используемой управляющей системой, чаще всего используется модель убеждений, желаний и намерений (англ. belief, desire, and intention (BDI) model), которая слабо отражает сами процессы генерации и непосредственного удовлетворения потребности.
Задачей данной работы является выделение и формализация выбранных агентом рецептов исполнения потребностей с учетом его ментальных представлений о себе и окружающей среде, а также возможного параллелизма выполнения действий.
Базовая модель
На наш взгляд, в качестве наиболее подходящей модели поведения интеллектуального агента может быть использована модель расширенного гибридного автомата, представленная следующей структурой.
H = (Q, X, F, Init, Inv, E, G, R, P, S),
где Q – множество дискретных состояний автомата;
F: Q*X > X – векторное поле, описывающее динамику изменения непрерывных переменных автомата в рамках конкретных дискретных состояний, которое включает функции генерации потребностей и процессы их реализации;
Init ⊆ Q*X – множество начальных состояний;
E ⊆ Q* Q – множество дуг-переходов между дискретными состояниями;
G: E > 2X – предикаты перехода по соответствующей дуге между парой дискретных состояний;
R: E*X > 2X – множество правил, определяющее изменение функций генерации потребностей и типовых рецептов (действий) по их реализации;
P – множество потребностей;
S – множество событий, влияющих на переходы внутри автомата, в том числе возникновения потребностей, готовности рецептов реализации потребностей к исполнению, запуска, окончания и прерывания действий, освобождения и захвата ресурсов и т.п.
Учет ментальных особенностей
В нашем случае модели должны учитываться следующие обстоятельства:
– данные, накапливаемые в управляющей системе агента, поступают от его рецепторов, которые не являются идеальными и могут искажать реальность,
– разные агенты в силу особенностей характера могут по-разному воспринимать одну и ту же информацию,
– рецепторы агентов имеют ограниченный радиус действия и не могут отразить всю полноту картины, доступную внешнему наблюдателю,
– принятие решений в момент t на основе ранее в (t – dt) наблюдаемых агентом или известных состояний объектов внешней среды также может быть неверным, так как объект к следующему моменту может измениться.
Отсюда следует, что управляющая система агента на основе недостоверной информации, доступной агенту, может принимать неверные решения о приоритетах потребностей и выборе конкретных рецептов их удовлетворения. Кроме того, на выбор решения оказывает влияние характер агента. Это ведет к тому, что окончательный выбор рецепта удовлетворения потребности может осуществляться методом «проб и ошибок».
С точки зрения глобального внешнего наблюдателя (исследователя) состояние агента Q(t) в каждый момент времени определяется его действительным (реальным) физическим состоянием QP(t) и ментальным представлением самого агента о его физическом состоянии и состоянии внешней среды QM(t). Другими словами Q(t) можно представить выражением
Q(t) = QP(t) + QM(t).
Реальное физическое состояние QP(t) агента в момент времени (t) включает:
– действительные знания агента: о структуре агента, типах характеристик, внутренних процессах организма, типах потребностей и возможных способах их удовлетворения (рецептах), выборе решений;
– действительные знания агента об объектах внешней среды: их структуре, типах характеристик, внутренних процессах, способах использования для удовлетворения потребностей агента;
– действительные знания агента о типах отношений и взаимодействий объектов с внешней средой;
– действительные способности агента.
Текущие физические данные определяют в момент t: место расположения и потребности агента; принятые решения и их результаты; состояние процессов реализации действующих потребностей; состояние рецепторов, эффекторов и организма агента; установленные отношения агента с внешними объектами; состояние процессов, протекающих внутри организма и генерирующих базовые потребности; доступную текущую информацию об объектах внешней среды, в том числе «попутную»; историю поведения агента.
Ментальное представление QM(t) включает те же составляющие информации только с точки зрения агента, т.е. его представление о своих знаниях, возможностях, внутреннем состоянии и состоянии внешней среды.
При появлении каждой новой потребности и возможности ее удовлетворения параллельно с другими процессами происходит интеграция действующих процессов с процессами цикла реализации новой потребности. После реализации потребности ее процессы удаляются из будущего состояния.
Условно процесс интеграции и дезинтеграции процессов и их влияние на состояние агента можно представить выражением
Q(t + dt) = Q(t) – QPvip(t) + QPnov(t) +
+ FP(t) + FM(t),
где QPvip(t) – изменение реального текущего состояния агента за счет освобождения ресурсов и средств, задействованных во всех законченных в данный момент рецептах удовлетворения потребности [8–10];
QPnov(t) – изменение реального текущего состояния за счет захвата ресурсов и средств, задействованных во всех новых, запущенных в данный момент рецептах;
FP(t) – изменения реального состояния внутренних параметров агента, внешних ресурсов и отношений, связанных с окончанием исполнения рецептов в текущий момент времени, а также изменения попутной информации;
FM(t) – изменения ментального представления агента.
Модель цикла реализации потребности
Цикл реализации каждой из параллельно существующих и исполняемых потребностей, которые в сумме определят состояние агента Q(t), может быть представлен графом переходов (рис. 2). Переключение между состояниями происходит в результате возникающих внутренних и внешних событий. Каждая потребность после генерации проходит стадии планирования и исполнения.
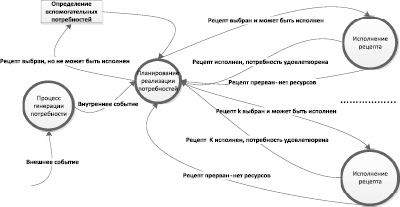
Рис. 2. Граф переходов процесса реализации потребности
В случае нехватки ресурсов и\или средств, а также условий для исполнения потребностей в процессе планирования может быть определена необходимость реализации вспомогательных потребностей. Появление более приоритетной потребности или изменение условий может вызвать прерывание стадии исполнения потребности с возможностью ее продолжения при появлении необходимых ресурсов и средств.
Для процесса реализации потребности определены следующие состояния:
qgenP(i) – состояние генерации потребности;
qplan – состояние планирования процессов реализации потребностей;
qR(i, k) – состояние процесса исполнения потребности i с использованием выбранного рецепта k, включающего множество захватываемых ресурсов и средств, а также необходимых отношений, устанавливаемых перед началом исполнения рецепта и расторгаемых по окончанию.
Определим:
BegP(i) – булева функция – индикатор возникновения потребности i;
TypeP(i) – тип потребности i;
TypeoutR(k) – тип результата исполнения рецепта k;
GotRM(k, i) – булева функция готовности рецепта k к исполнению потребности i на основе QM(t);
ViborRM(k, i) – булева функция выбора рецепта k для реализации потребности i на основе QM(t);
GenPM(k, i) – функция генерации вторичных потребностей рецепта k для реализации потребности i на основе QM(t);
EndR(k, i) – булева функция-индикатор окончания выполнения рецепта k при реализации потребности i;
IntR(k, i) – булева функция-индикатор прерывания выполнения рецепта k при реализации потребности i в случае невозможности его дальнейшего исполнения или необходимости использования его средств или ресурсов для реализации более приоритетной потребности;
qPvip(t, k, i) – изменение реального текущего состояния агента за счет освобождения ресурсов и средств, задействованных при выполнении рецепта k для потребности i;
qPnov(t, k, i) – изменение реального текущего состояния за счет захвата ресурсов и средств, задействованных в запущенном в данный момент рецепте для потребности i.
Тогда переходы между состояниями процесса исполнения потребности i и соответствующие изменения состояния Q агента определяются в виде псевдокода следующими выражениями:
1. IF BegP (i) THEN qgenP(i) > qplan;
qPnov (t, k, i) = qplan;
/*При возникновении потребности происходит переход к планированию, параллельно выполняются ранее запущенные процессы реализации потребностей */
2. IF TypeP(i) = TypeoutR(k) & GotRM(k, i) & ViborRM(k, i) THEN qplan > qR(i, k);
qPvip(t, k, i) = qplan;
qPnov(t, k, i) = qR(i, k)
/*При выборе подходящего рецепта, который может быть выполнен в данный момент времени, происходит переход к исполнению рецепта*/
3. IF TypeP(i) = TypeoutR(k)  & ViborRM(k, i) THEN {GenPM(k, i), qplan > qplan}
& ViborRM(k, i) THEN {GenPM(k, i), qplan > qplan}
/*Если выбранный рецепт не готов к исполнению, генерация вторичных потребностей и повторение планирования*/
4. IF EndR(k) THEN qR(i,k)> qplan
/*Когда исполнение рецепта окончено, переход к планированию следующей потребности*/
qPnov(t, k, i) = qplan;
qPvip(t, k, i) = qR(i, k)
5. IF IntR(k) THEN {GenPM(k); qR(i,С) > qplan}
/*Если исполнение рецепта прервано, то генерация потребности для окончания рецепта k и переход в состояние планирования*/
Выводы
В рамках проведенного исследования получены следующие результаты:
1. Предложена обобщенная модель гибридного автомата, учитывающая ментальные особенности принятия решений активными агентами в процессе реализации потребностей.
2. Приведенная модель может быть положена в основу интегрированного комплекса цифровых двойников активных и пассивных объектов городской структуры, предназначенной для поддержки процессов управления «умным городом».
Библиографическая ссылка
Клебанов Б.И., Антропов Т.В. УЧЕТ МЕНТАЛЬНЫХ СВОЙСТВ ИНТЕЛЛЕКТУАЛЬНЫХ АГЕНТОВ В МОДЕЛИ ГИБРИДНОГО АВТОМАТА // Современные наукоемкие технологии. 2019. № 6. С. 66-70;URL: https://top-technologies.ru/en/article/view?id=37551 (дата обращения: 14.06.2026).