


Scientific journal
Modern high technologies
ISSN 1812-7320
"Перечень" ВАК
ИФ РИНЦ = 1,279
DETECTION AND EVALUATION OF LEVEL OF SIGNALS OF NON-COMPETITION ECHA IN USING CORRELATION WITH TRANSMITTED SIGNALS

Современные высокоскоростные распределенные системы передачи информации требуют возрастающей пропускной способности подсистемы передачи как пользовательской, так и служебной информации, причем в цифровой форме и в полнодуплексном режиме. Такая форма информационного обмена предполагает одновременную передачу цифровых сигналов через один и тот же физический канал связи в обоих направлениях в реальном масштабе времени [1–3]. И это является самой ресурсосберегающей и оправданной с экономической точки зрения основой увеличения пропускной способности распределительной сети между управляющей подсистемой и объектами управления [4].
Это позволяет обеспечить ощутимую экономию затрат на линейные сооружения, но связано с применением как аппаратного, так и вычислительного ресурса всей системы на организацию дуплексного режима передачи управляющих сигналов. Реализация дуплексного информационного обмена связана с необходимостью подавления сигналов собственного передатчика на входе приемного устройства и предполагает наличие механизма эхокомпенсации с адаптацией к изменяющимся условиям передачи [5–7].
Разработанный эхокомпенсатор [8] использовал для работы отношения длин векторов передаваемых сигналов с одинаковыми формами.
Цель исследования: повышение точности компенсации эхосигналов, вносимых собственным передатчиком в принимаемый сигнал, при разбалансировке дифференциальной системы и воздействии помех.
Материалы и методы исследования
Известный инвариантный эхокомпенсатор обладает недостатком, это отсутствие адаптивности к изменениям параметров эхотракта, которые возникают при неправильной работе дифференциальной системы в результате изменения параметров канала связи. Выходной сигнал инвариантного эхокомпенсатора определяется по формуле
Sвых эк(t) = kSпер(t) + Sпр(t),
где Sпер(t) – передаваемый сигнал; Sпр(t) – принимаемый сигнал; k – коэффициент передачи паразитного эхотракта; kSпер(t) – погрешность компенсирующего сигнала.
Реализация адаптивности к изменениям параметров эхотракта была представлена в полезной модели «Адаптивный инвариантный эхокомпенсатор [9]».
Адаптивность исследуемого эхокомпенсатора достигается за счет оценки коэффициента передачи паразитного эхотракта, а также расчета сигналов компенсации.
Представленная структурная схема адаптивного инвариантного эхокомпенсатора (рис. 1) состоит из контуров управляющих сигналов, эхокомпенсации и модуля адаптации.
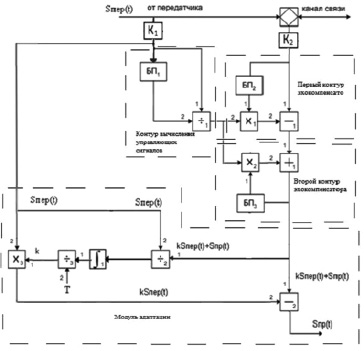
Рис. 1. Структурная схема адаптивного инвариантного эхокомпенсатора
Для успешной работы этого устройства предполагается процесс обучения, в период которого встречные сигналы должны отсутствовать, а обучающий сигнал единичной амплитуды от передающего устройства записывается в первый блок памяти, а отклик эхотракта – во второй блок памяти.
Во время передачи сообщений отсчеты передаваемых сигналов через ключ К1 поступают на вход первого блока памяти, где и хранятся в течение интервала дискретизации, и на первый вход делителя 1, который определяет управляющий сигнал, равный отношению двух временных отсчетов сигнала передатчика, передаваемых в данный и предыдущий моменты времени. За счет обладания свойств инвариантности – это сохранение величины такого же отношения для отсчетов эхосигнала на выходе дифференциальной системы, то есть на выходе паразитного эхотракта. Далее происходит умножение с помощью первого умножителя эха от предыдущего отсчета передаваемого сигнала, который хранится во 2 блоке памяти, на управляющий сигнал. В результате таких преобразований получилась величина эха от передаваемого в данный момент отсчета сигнала передатчика. При вычитании с помощью вычитателя 1 полученной таким образом величины эха из суммы реального эха и принимаемого сигнала и осуществляется компенсация эха первым контуром эхокомпенсатора.
В результате таких мероприятий первый контур, ликвидируя сигналы эха, также меняет структуру принимаемых сигналов. Для восстановления структуры принимаемых сигналов служит второй контур, который имеет зеркальную структуру, состоящую из первого сумматора, второго умножителя и третьего блока памяти.
При изменении частотно-временных характеристик канала связи после этапа обучения происходит разбалансировка дифференциальной системы, в результате чего во втором контуре возникают эхосигналы, повторяющие с точностью до неизвестного множителя k форму передаваемых сигналов. Для устранения возникших эхосигналов используется модуль адаптации, содержащий делитель 2, интегратор 1, делитель 3, умножитель 3 и вычитатель 2. В результате с помощью делителя 2, интегратора 1 и делителя 3 вычисляется оценка величины k

 (1)
(1)
где Т – интервал интегрирования.
При некоррелированности Sпр(t) и Sпер(t), что обеспечивается процедурами скремблирования сигналов на обеих сторонах системы связи, слагаемое в (1) будет вносить незначительную погрешность в оценку множителя k.
После определения k с помощью умножителя 3 происходит формирование компенсирующих эхосигналов kSпер(t), а далее во втором вычитателе будет происходить компенсация эхосигналов.
Наличие погрешности эхокомпенсации, вносимой помехами, поступающими на вход эхокомпенсатора из канала связи, является существенным недостатком этого инвариантного адаптивного эхокомпенсатора. Если в канале действует помеха типа белого шума со спектральной плотностью мощности G0, то дисперсия погрешности оценки коэффициента передачи паразитного эхотракта, вносимая помехой, будет равна
D(Δk) = G0E0С/T2, (2)
где E0C – энергия передаваемого сигнала.
Sобр(t) = 1/Sпер(t), величина, вычисленная на интервале скользящего интегрирования длительностью T.
Результаты исследования и их обсуждение
Для достижения поставленной цели было разработано новое устройство. В схеме исследуемого эхокомпенсатора (рис. 1) были добавлены новые блоки (интегратор, квадратор), а также умножитель 4 заменен на делитель 2.
На рис. 2 изображена разработанная новая схема адаптивного инвариантного эхокомпенсатора с корреляцией.
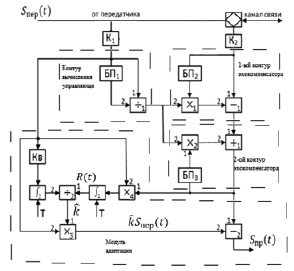
Рис. 2. Структурная схема адаптивного эхокомпенсатора с коррелляцией
Работа исследуемой схемы будет заключаться в следующим. В результате разбалансировки дифференциальной системы канала связи, а также при воздействии помехи n(t), на выходе эхокомпенсатора, появится погрешность эхокомпенсации ΔSэк(t):
ΔSэк(t) = kSпер(t) + n(t),
где k – коэффициент передачи эхотракта,
При выполнении математических операций в модуле адаптации уменьшается погрешность эхокомпенсации ΔSэк(t).
Произведем расчет значения корреляции R(T) между передаваемым сигналом и выходным сигналом эхокомпенсатора Sвых.эк(t) = ΔSэк(t) + Sпр(t) + n(t):


где  – энергия передаваемых сигналов.
– энергия передаваемых сигналов.
При отсутствии корреляции передаваемых и принимаемых сигналов последний интеграл будет равен нулю.
Для интервала скользящего интегрирования длительностью T с помощью квадратора Кв и интегратора 2 определим энергию E(T).
Потом делителем 2 вычисляется оценка величины коэффициента передачи эхотракта  :
:

В результате умножения коэффициента передачи  и передаваемого сигнала Sпер(t), образуется копия сигналов погрешности эхокомпенсации
и передаваемого сигнала Sпер(t), образуется копия сигналов погрешности эхокомпенсации  , при этом осуществляется компенсация эхосигналов на входе приемника системы.
, при этом осуществляется компенсация эхосигналов на входе приемника системы.
Дисперсия погрешности будет равна
 (3)
(3)
Если допустить, что плотность вероятности величин отсчетов передаваемых сигналов внутри диапазона значений будет равномерной –M ≤ Sпер(t) ≤ M, где, (–M÷M – динамический диапазон изменений отсчетов сигналов) и влиянии помехи типа белого шума, то выигрыш в точности вычисления оценки коэффициента передачи эхотракта в данной полезной модели по отношению к прототипу составит
где β – значение отсчетов передаваемых сигналов.
Так при  выигрыш в точности эхокомпенсации составит
выигрыш в точности эхокомпенсации составит

Для проведения доказательства работоспособности и эффективности адаптивного инвариантного эхокомпенсатора (рис. 1), по отношению к адаптивному инвариантному эхокомпенсатору посредством деления сигналов контура 2 на передаваемые сигналы, с последующим интегрированием (рис. 2), была разработана модель работы двух эхокомпенсаторов при неправильной работе дифференциальной системы и влияния помех типа белый шум.
При оценке качества эхокомпенсации использовалась величина отношения мощностей на входе и выходе исследуемых устройств.
Результаты эксперимента для различных отношений сигнал-шум в канале связи при длительности интервала скользящего интегрирования приведены на рис. 3.
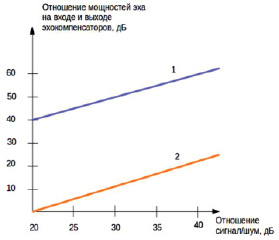
Рис. 3. График зависимости отношений сигнал-шум в канале при длительности интервала скользящего интегрирования: 1 – результаты исследования адаптивного инвариантного эхокомпенсатора с корреляцией, 2 – результаты исследования адаптивного инвариантного эхокомпенсатора (прототипа) [10]
Выводы
Результаты исследования доказали, что разработанное устройство обнаруживает, вычисляет и устраняет возникающие из-за разбалансировки дифференциальной системы эхосигналы, благодаря их сходству с передаваемыми сигналами. Повышение точности эхокомпенсации обеспечивается за счет замены процедуры деления суммы принимаемых сигналов, помехи и эхосигналов на передаваемые сигналы на процедуру вычисления величины корреляции этой суммы с передаваемыми сигналами, что доказывает ее помехоустойчивость и работоспособность.
Библиографическая ссылка
Абрамов С.С., Лебедянцев В.В., Павлов И.И., Абрамова Е.С. ОБНАРУЖЕНИЕ И ОЦЕНКА УРОВНЯ СИГНАЛОВ НЕДОКОМПЕНСАЦИИ ЭХА ПРИ ИСПОЛЬЗОВАНИИ КОРРЕЛЯЦИИ С ПЕРЕДАВАЕМЫМИ СИГНАЛАМИ // Современные наукоемкие технологии. 2018. № 10. С. 9-13;URL: https://top-technologies.ru/en/article/view?id=37186 (дата обращения: 02.08.2026).