


Scientific journal
Modern high technologies
ISSN 1812-7320
"Перечень" ВАК
ИФ РИНЦ = 1,279
ON THE LIMIT CYCLES IN THE MODEL OF OSCILLATOR

Хорошо известно, какую роль в радиотехнике, электронике, теории управления и других технических науках играют периодические процессы. Как правило, эти процессы являются рабочими режимами функционирования технических систем, а следовательно, должны обладать свойством устойчивости, т.е. притягивать к себе другие режимы – переходные процессы. Математическими образами периодических процессов часто выступают замкнутые траектории (циклы) в соответствующем фазовом пространстве – пространстве состояний математической модели. Если такие циклы изолированы, то они называются предельными. Если циклы притягивают к себе соседние траектории при t > + ∞, то они называются устойчивыми предельными циклами, если отталкивают, то неустойчивыми. Именно устойчивые предельные циклы выступают образами устойчивых автоколебаний в физической системе. Из сказанного вытекает актуальность задачи нахождения как устойчивых, так и неустойчивых циклов, а также анализ зависимости поведения динамических систем в целом от параметров [1, 2]. Последние вопросы связаны с исследованием бифуркаций в динамических системах [3]. Так, например, на рис. 1 приведена последовательность фазовых картин некоторой физической системы, зависящей от параметра α. Видно, что разным значениям параметра α могут отвечать принципиально различные фазовые картины – а следовательно, и поведение физической системы.
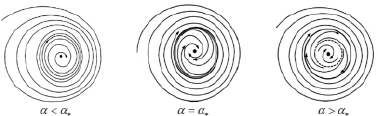
Рис. 1. Бифуркация рождения устойчивого цикла из сгущения траекторий
Ясно и теоретически хорошо изучено, что если в системе несколько циклов, то все они одновременно не могут являться устойчивыми, так как траектория, «наматывающаяся» на некоторый цикл при t > + ∞, автоматически должна «сматываться» с некоторого цикла, который в свою очередь будет неустойчивым. Отметим, что устойчивым предельным циклам отвечает в физической системе автоколебательный процесс. В данной статье рассматривается автономное дифференциальное уравнение второго порядка, являющееся математической моделью генератора автоколебаний [1, 4]
 (1)
(1)
Здесь 
 динамические переменные, определяющие состояние генератора,
динамические переменные, определяющие состояние генератора,  – функция обратной связи, μ – безразмерный положительный параметр, отвечающий за подкачку энергии в систему от внешнего источника (параметр возбуждения), α,ω2 – положительные безразмерные параметры генератора. Уравнение (1) при μ = 0 совпадает с уравнением гармонического осциллятора, при μ > 0, α = 0 – с классическим уравнением Ван-дер-Поля - генератора с контуром в цепи анода или сетки. Известно, что на фазовой плоскости
– функция обратной связи, μ – безразмерный положительный параметр, отвечающий за подкачку энергии в систему от внешнего источника (параметр возбуждения), α,ω2 – положительные безразмерные параметры генератора. Уравнение (1) при μ = 0 совпадает с уравнением гармонического осциллятора, при μ > 0, α = 0 – с классическим уравнением Ван-дер-Поля - генератора с контуром в цепи анода или сетки. Известно, что на фазовой плоскости  уравнения Ван-дер-Поля имеется единственный устойчивый предельный цикл, которому с физической точки зрения отвечает устойчивый автоколебательный процесс. Уравнение (1) при α ≠ 0 обобщает уравнение Ван-дер-Поля на случай иной аппроксимации нелинейной характеристики обратной связи [4]. Целью настоящей статьи является качественно-численное изучение математической модели генератора колебаний (1) в зависимости от параметров модели. Ее результаты могут быть полезны при теоретическом анализе и экспериментальном исследовании функционирования систем управления в различных условиях с целью улучшения их эксплуатационных характеристик. Учитывая, что заменой времени параметр ω можно сделать равным единице, будем в дальнейшем считать ω = 1.
уравнения Ван-дер-Поля имеется единственный устойчивый предельный цикл, которому с физической точки зрения отвечает устойчивый автоколебательный процесс. Уравнение (1) при α ≠ 0 обобщает уравнение Ван-дер-Поля на случай иной аппроксимации нелинейной характеристики обратной связи [4]. Целью настоящей статьи является качественно-численное изучение математической модели генератора колебаний (1) в зависимости от параметров модели. Ее результаты могут быть полезны при теоретическом анализе и экспериментальном исследовании функционирования систем управления в различных условиях с целью улучшения их эксплуатационных характеристик. Учитывая, что заменой времени параметр ω можно сделать равным единице, будем в дальнейшем считать ω = 1.
Метод Ван-дер-Поля
1. Для начала для уравнения (1) на плоскости  рассмотрим положительно-определенную функцию Ляпунова
рассмотрим положительно-определенную функцию Ляпунова  , (
, ( полная энергия системы) производная, от которой, вычисленная в силу уравнения (1), имеет вид
полная энергия системы) производная, от которой, вычисленная в силу уравнения (1), имеет вид
 .
.
Легко видеть, что при всех z,  и всех значениях параметров α > 0,25 и μ > 0 функция
и всех значениях параметров α > 0,25 и μ > 0 функция  неотрицательна. Отсюда вытекает, что z = 0,
неотрицательна. Отсюда вытекает, что z = 0,  неустойчивое в целом положение равновесия [5] осциллятора (1) и, следовательно, в области α > 0,25 устойчивые колебания в системе, описываемой уравнением (1), невозможны.
неустойчивое в целом положение равновесия [5] осциллятора (1) и, следовательно, в области α > 0,25 устойчивые колебания в системе, описываемой уравнением (1), невозможны.
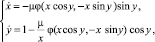
2. Предположим теперь, что 0 < α < 0,25,а μ – малый параметр. Тогда уравнение (1) квазилинейно и можно применить, например, для его исследования метод Ван-дер-Поля – частный случай более строгого метода – метода усреднения [6]. С этой целью в (1) сделаем замену переменных по формулам: 
 . В переменных x, y уравнение (1) запишется в виде эквивалентной системы
. В переменных x, y уравнение (1) запишется в виде эквивалентной системы
 (2)
(2)
правые части которой являются 2π – периодическими функциями по фазе y.
От точной системы (2) перейдем к приближенной системе так называемых укороченных уравнений
 (3)
(3)
где правые части  и
и  являются осредненными по периоду функциями
являются осредненными по периоду функциями


В системе (3) первое уравнение позволяет приближенно определить значения стационарных амплитуд колебаний. Эти амплитуды находятся из конечного уравнения
 (4)
(4)
которое в нашем случае принимает вид

Вычисляя интегралы



окончательно приходим к уравнению:  Отсюда находим, что при 0 < ? < 0,125 его корнями будут (амплитуды стационарных колебаний):
Отсюда находим, что при 0 < ? < 0,125 его корнями будут (амплитуды стационарных колебаний):


 .
.
На рис. 2 и в таблице соответственно изображены графики и приведены значения функций x1 = x1(α), x2 = x2(α). Видно, что при α = 0,125 величина x1 = x2. Последнее равенство будет отвечать слипанию на фазовой плоскости  уравнения (1) устойчивого и неустойчивого циклов, т.е. бифуркации полуустойчивого цикла. Заметим, также, что
уравнения (1) устойчивого и неустойчивого циклов, т.е. бифуркации полуустойчивого цикла. Заметим, также, что  , что согласуется с известным фактом: для классического уравнения Ван-дер-Поля для малых значений параметра μ амплитуда x1 = 2 [6, 7].
, что согласуется с известным фактом: для классического уравнения Ван-дер-Поля для малых значений параметра μ амплитуда x1 = 2 [6, 7].
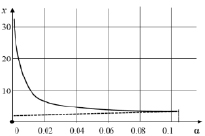
Рис. 2. Графики функций x1 = x1(α), x2 = x2(α) (сплошная кривая отвечает амплитуде неустойчивого колебания, пунктирная – амплитуде устойчивого колебания)
Для определения амплитуд, отвечающих устойчивому и неустойчивому колебаниям, вычислим производную 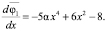 Учитывая очевидные неравенства
Учитывая очевидные неравенства



заключаем, что при 0 < α < 0,125 в системе возможен лишь один автоколебательный режим со стационарной амплитудой x = x1. Стационарный режим с амплитудой x = x2 является, очевидно, неустойчивым, т.е. физически нереализуемым. Кроме того, напомним, что положение равновесия x0 = 0 является также неустойчивым.
|
α |
Амплитуда устойчивого цикла x1 |
Амплитуда неустойчивого цикла x2 |
|
0 |
2 |
∞ |
|
0,0001 |
2,0002 |
141 |
|
0,001 |
2,002 |
44 |
|
0,01 |
2,02 |
14 |
|
0,1 |
2,35 |
3,809 |
|
0,105 |
2,39 |
3,65 |
|
0,11 |
2,44 |
3,498 |
|
0,12 |
2,58 |
3,16 |
|
0,125 |
|
|


Моделирование траекторий на фазовой плоскости
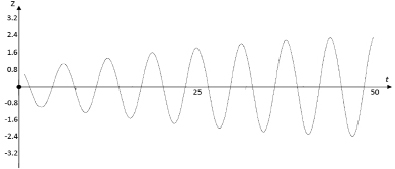
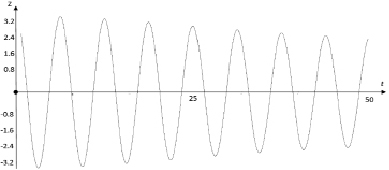
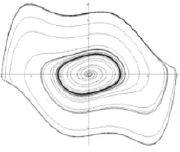
Для визуализации динамических процессов в автогенераторе дадим численное представление его траекторий на плоскости  и решений (интегральных кривых) на плоскости (t, z) c использованием программы WinSet [8, 9]. На рис. 3 изображены устойчивый (внутренний) и неустойчивый (внешний) циклы уравнения (1). Для построения неустойчивого цикла использовалось интегрирование в обратную сторону по времени. При этом движение изображающих точек происходит естественно против часовой стрелки. При вычислениях были взяты следующие значения параметров: μ = 0,1, α = 0,105, ω2 = 1. Внешний цикл образует границу притяжения устойчивого – внутреннего цикла. На рис. 4 на плоскости (t, z) изображены соответствующие интегральные кривые, отвечающие переходному процессу.
и решений (интегральных кривых) на плоскости (t, z) c использованием программы WinSet [8, 9]. На рис. 3 изображены устойчивый (внутренний) и неустойчивый (внешний) циклы уравнения (1). Для построения неустойчивого цикла использовалось интегрирование в обратную сторону по времени. При этом движение изображающих точек происходит естественно против часовой стрелки. При вычислениях были взяты следующие значения параметров: μ = 0,1, α = 0,105, ω2 = 1. Внешний цикл образует границу притяжения устойчивого – внутреннего цикла. На рис. 4 на плоскости (t, z) изображены соответствующие интегральные кривые, отвечающие переходному процессу.
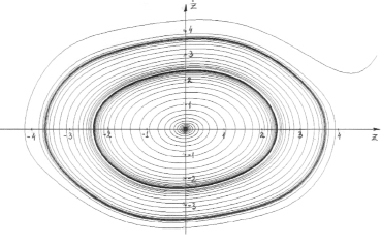
Рис. 3. Предельные циклы на фазовой плоскости (внутренний цикл – устойчивый, внешний – неустойчивый)
а)
б)
Рис. 4. Возбуждение генератора: a) при малой начальной энергии; б) при большой начальной энергии
а) б)
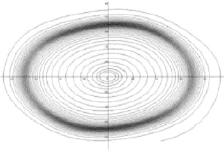
Рис. 5. Фазовые портреты: а) полуустойчивый цикл (α = 0,125); б) устойчивый и неустойчивые циклы (μ = 0,3, α = 0,05)
На рис. 5, а, изображен фазовый портрет полуустойчивого цикла – цикла, который получается от слияния устойчивого и неустойчивого циклов при α = 0,125.
Замечание 1. В области параметра  , как уже отмечалось, уравнение
, как уже отмечалось, уравнение  имеет единственный корень х0 = 0, которому отвечает неустойчивое в целом положение равновесия z = 0,
имеет единственный корень х0 = 0, которому отвечает неустойчивое в целом положение равновесия z = 0,  уравнения (1). Заметим, что рассмотренная нами функция Ляпунова эту область параметра не определила.
уравнения (1). Заметим, что рассмотренная нами функция Ляпунова эту область параметра не определила.
Замечание 2. Современные средства визуализации позволяют оценить и влияние параметров на форму колебаний. На рис. 5, б, приведен фазовый портрет уравнения (1) для других значений параметров. Видно, что отклонение от малых значений параметра μ оказывает сильное влияние на форму колебаний.
Заключение
Рассмотренная выше математическая модель описывает мягкий режим возбуждения генератора колебаний. Однако если в уравнении (1) знак при функции  изменить на противоположный, то придем к модели, описывающей жесткий режим возбуждения колебаний, при этом циклы сменят естественно свою устойчивость. При этом положение равновесия в начале координат будет устойчивым, внутренний цикл будет неустойчивым, внешний – устойчивым. В этом случае для возбуждения генератора необходима дополнительная энергия, забрасывающая динамические переменные
изменить на противоположный, то придем к модели, описывающей жесткий режим возбуждения колебаний, при этом циклы сменят естественно свою устойчивость. При этом положение равновесия в начале координат будет устойчивым, внутренний цикл будет неустойчивым, внешний – устойчивым. В этом случае для возбуждения генератора необходима дополнительная энергия, забрасывающая динамические переменные  генератора в область, находящуюся за неустойчивым циклом [9]. В уравнении (1) характеристика
генератора в область, находящуюся за неустойчивым циклом [9]. В уравнении (1) характеристика  обладала свойствами
обладала свойствами 
 . Однако проведенные рассуждения можно провести и для более общего случая, например отказавшись при малом μ от первого предположения – симметрии «коэффициента трения» αz4 – z2 + 1. Кроме того, при немалых значениях параметра μ, используя программу Winset, можно исследовать эффекты релаксации, сказывающиеся в наличии быстрых и медленных движений в автогенераторе, что аналитическими методами сделать затруднительно.
. Однако проведенные рассуждения можно провести и для более общего случая, например отказавшись при малом μ от первого предположения – симметрии «коэффициента трения» αz4 – z2 + 1. Кроме того, при немалых значениях параметра μ, используя программу Winset, можно исследовать эффекты релаксации, сказывающиеся в наличии быстрых и медленных движений в автогенераторе, что аналитическими методами сделать затруднительно.
Использованный выше метод Ван-дер-Поля носит эвристический качественный характер и применим для колебательных систем только с одной степенью свободы. Его развитие и распространение на многомерные системы было сделано Н.М. Крыловым, Н.Н. Боголюбовым и Ю.А. Митропольским. Использование этого метода в рассмотренной выше задаче позволило бы построить асимптотические представления для решений и указать их точность, но это может быть предметом другого исследования.
Библиографическая ссылка
Булекбаев Д.А., Морозов А.В. О ПРЕДЕЛЬНЫХ ЦИКЛАХ В МОДЕЛИ АВТОГЕНЕРАТОРА // Современные наукоемкие технологии. 2018. № 9. С. 35-40;URL: https://top-technologies.ru/en/article/view?id=37155 (дата обращения: 03.07.2026).