


Scientific journal
Modern high technologies
ISSN 1812-7320
"Перечень" ВАК
ИФ РИНЦ = 1,279
INFORMATION MODEL OF MANAGEMENT OF THE SYSTEM OF FORESTRY TRANSPORT FLOWS

Особенность данного исследования как теоретико-операционного определяется характером предложенной модели исследуемой операции [1] – модели движения транспортного потока по дороге, находящегося под воздействием окружающей среды и средств управления, причем окружающая среда оказывает влияние на дорожные условия и на характер взаимодействия транспортного потока и дорожных условий (режим движения) (рис. 1). Главным достоинством предложенной модели является то, что существует возможность описать функционирование системы «дорожные условия – транспортные потоки» с помощью основной диаграммы транспортного потока. Указанная диаграмма связывает в единое целое параметры дороги и метеорологические условия, средства управления и режимы движения транспортного потока, то есть входные и выходные параметры комплекса ВАДС.

Рис. 1. Схема внутренних связей в системе дорожные условия – транспортные потоки
Основная диаграмма транспортного потока подразумевается как множество возможных при данных дорожных и метеорологических условиях состояний транспортного потока, то есть троек параметров: λ – интенсивность, ρ – плотность и V – скорость потока.
Состав движения определяет распределение необходимых скоростей движения автомобилей составом движения, эксплуатационными характеристиками автомобилей и психофизиологическим состоянием водителей. Причем необходимая скорость движения транспортного потока в данном случае не зависит от характеристик определенного участка дороги, желаемая скорость определяет технические возможности автомобиля и намерения водителя.
Желаемая скорость движения и указания, которые были выданы определенными средствами управления, влияют на формирование одного из доступных в режимах указанной диаграммы режимов движения на определенной протяженности дороги. Порядок и организация движения определяется режимом движения и насыщенностью потока на определенном участке и функцией разграничения вынужденных скоростей. На порядок и организацию движения влияет интенсивность входящего на определенный участок потока, что формирует режим и насыщенность потока на определенном участке и, соответственно, определяет плотность потока на выходе из участка.
Средства управления – это управление знаками и сигналы, многопозиционные указатели скоростей, устройства регулирования въездов – одним словом, вся совокупность средств, которой будет располагать управляющий орган. В широком плане к ним относятся все управляющие воздействия, которые могут быть приняты при проектировании и эксплуатации дорог. На существующих дорогах и средствах управления относятся возможности дорожно-эксплуатационных организаций по изменению переменных параметров и состояния дорог.
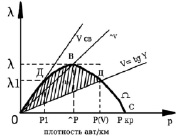
Целесообразно воспользоваться основной диаграммой транспортного потока при вычислении пределов варьирования режимов движения транспортных потоков при определенных варьированиях характеристик дорог и метеорологических условий и, соответственно, для определения оптимальных управляющих возможностей. Рассматривая основную диаграмму транспортного потока на рис. 2, а, как множество сочетаний параметров {λ, ρ, v), можно отметить, что граница области допустимых состояний может быть задана функцией λ = λ(ρ). Тогда сама эта область будет обозначаться int Ω. Касательная к кривой Ω в нуле задает скорость свободного движения в тех условиях, для которых построена диаграмма.
а) б)
Рис. 2. а) основная динамика транспортного потока; б) связи динамики транспортного потока с производной диаграммой (1 – опасная зона при Vдоп = V = tg φ)
Значение ρ не равно 0, для которого λ(ρ) = 0 (точка С) представляет собой критическую плотность потока. Проекция точки пересечения Ω в прямой V = const (точка Д) на ось абсцисс представляет максимальную плотность потока ρ (V), для которой данная скорость хотя бы теоретически может быть достигнута.
Горизонтальную касательную к кривой Ω в точке В обычно трактуют как линию уровня теоретической пропускной способности. Это истолкование правильно лишь в том случае, когда функция распределения желаемых и фактических скоростей сосредоточена в интервале v > V^. Если желаемые или фактические скорости сосредоточены ниже V^, например перевозка хрупких или негабаритных грузов, ограничение скорости из-за неровности покрытия и другое, пропускная способность не может быть достигнута даже теоретически.
Обычно диаграмма транспортного потока изображается как огибающая точек плотности и интенсивности при средних скоростях транспортного потока. Однако фактические скорости даже при эталонных состоянии дороги и метеорологических условиях колеблются в широких пределах, но чем больше плотность, тем меньше размах колебаний.
Это свойство объясняет еще одну особенность движения транспортного потока: при наличии какого-либо ограничения по скорости или плотности возможность движения со скоростями или плотностями выше (или ниже) установленных пределов не исключается. Например, как скорость ограничена до V = tgφ (рис 2, б), то отдельные автомобили могут двигаться с большой скоростью, хотя и допускается риск. В этом случае на основной диаграмме может быть определена основная зона или зона возможных превышений установленных ограничений.
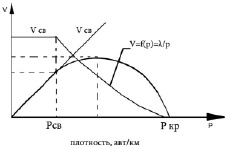
Кроме основной может быть построена производная диаграмма транспортного потока, которая представляет собой график скорости при данной плотности ρ (рис. 2), если основная диаграмма задана функцией λ = λ(ρ), то производная диаграмма – функцией V(ρ) = λ(ρ)/ρ.
Таким образом, производная диаграмма V = ρ выражает характер изменения скорости при изменении плотности в данных условиях движения. Интересно отметить, что при плотности транспортного потока меньшей плотности связанного движения средняя скорость не зависит от плотности, поэтому важным вопросом является определение интервала, при котором начинает заметно ощущаться взаимное влияние автомобилей. По различным данным [2–4] величина указанного интервала колеблется от 5 до 10 сек. На основании выполненных исследований и обобщения имеющихся данных установлена зависимость снижения средних скоростей движения при уменьшении интервалов между автомобилями, а также характерные особенности движения транспортного потока. В эталонных условиях свободное движение автомобилей наблюдается при интервалах более 9–10 сек, то есть при интенсивности движения менее 360 авт/ч. Это означает, что при эталонных условиях свободное движение однородного транспортного потока на двухполосных дорогах с учетом неравномерного по часам суток и времени года. Коэффициент неравномерности (1,3–1,8) может быть обеспечен при интенсивности движения не более 4000–6000 авт/сутки.
В реальных условиях на двухполосных дорогах наблюдается большое количество обгонов с выездом на полосу встречного движения, которые оказывают большое влияние на порядок и интенсивность транспортного потока. Установлено [5], что обгон мало влияет на режим движения встречного потока при наличии интервалов между автомобилями более 17–20 сек., то есть при интенсивности движения по дороге не более 2000 авт/сутки. При более высокой интенсивности скорость движения транспортного потока заметно снижается. Для ее определения предложен целый ряд формул [6, 7].
Однако в этих формулах не учитывается влияние метеорологических условий на состояние дороги.
Дорожные условия воздействуют не только на скорость свободного движения: такие факторы, как сужение проезжей части, ухудшение сцепления и другие, изменяют все множество возможных состояний транспортного потока, то есть изменяют форму основной диаграммы транспортного потока.
Это подтверждается экспериментальными исследованиями, выполненными в различных дорожных условиях [5, 8]. Изменение диаграммы Ω зависит от времени воздействия вектора х = х(t), то есть изменения Ω во времени можно описать дифференциальным уравнением
Конкретный вид функции F может быть определен только на основе тщательного анализа экспериментально полученных диаграмм транспортного потока в различных условиях.

Однако можно отметить частные зависимости Ω от Х, которые имеют существенное практическое значение.
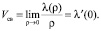
Пусть известна экспериментальная зависимость скорости свободного движения от одного из факторов хi с немедленным воздействием V = μ (xi) [9]. Если диаграмма Ω при данном значении Х задана уравнением λ = λ(хiρ), то  (рис. 3).
(рис. 3).
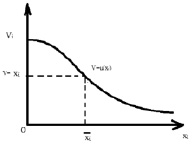
Рис. 3. Деформация основной диаграммы транспортного потока (скорость свободного движения V = μ(xi))
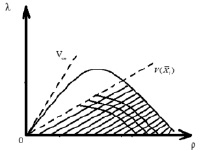
Рис. 4. Деформация основной диаграммы транспортного потока (влияние фактора, ограничивающего скорость свободного движения)
При  находится соответствующая максимально допустимая скорость
находится соответствующая максимально допустимая скорость  , то есть диаграмма Ω при условии Хi должна лежать в заштрихованной области (рис. 4).
, то есть диаграмма Ω при условии Хi должна лежать в заштрихованной области (рис. 4).
Пусть теперь известна экспериментальная зависимость критической плотности ρкр от параметра хj (например, от скользкости покрытия) ρкр = μi(хj). Тогда диаграмма транспортного потока для данных условий  должна отличаться от диаграммы построенной для эталонных условий смещением точки критической плотности ρкр
должна отличаться от диаграммы построенной для эталонных условий смещением точки критической плотности ρкр то есть должна лежать в заштрихованной области (рис. 5).
то есть должна лежать в заштрихованной области (рис. 5).
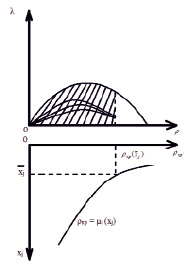
Рис. 5. Деформация основной диаграммы транспортного потока (влияние фактора, ограничивающего допустимую плотность)
Самым сложным будет случай, когда совместное действие двух или более факторов (параметров дороги или метеорологических элементов х?, хј) приведет к снижению скорости движения и увеличению интервалов [10]. В этом случае критическая плотность уменьшается в соответствии с графиком ρ = μ,(хј), а скорость свободного движения – в соответствии с зависимостью V = μ(х?). В этих условиях множество допустимых сочетаний троек параметров λ, V, ρ должно лежать в площади, ограниченной сверху и справа (рис. 6).
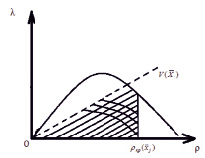
Рис. 6. Деформация основной диаграммы транспортного потока (совместное влияние двух факторов)
Таким образом, при изменении состояния дорог и метеорологических условий изменяется форма и параметры основной диаграммы транспортного потока, и в том числе наиболее важные показатели – плотность, пропускная способность, скорость движения. Это означает, что установленные для эталонных условий оптимальные значения основных параметров не являются оптимальными для условий движения в неблагоприятные периоды года. Следовательно, каждому состоянию дорог и метеорологических условий соответствуют свои оптимальные значения основных параметров в рамках основной диаграммы транспортного потока, то есть в каждом случае происходит деформация основной диаграммы транспортного потока, вследствие чего количество допустимых сочетаний параметров функционирования системы ДУ–ТП (троек λ, ρ, v) существенно сокращается. При этом может быть выражено два основных вида деформации основной диаграммы транспортного потока.
1 вид – деформация происходит вследствие ограничения каким-либо фактором допустимой или фактической скорости движения при отсутствии ограничений по плотности. Эту функцию можно направить деформацией по скорости. При этом площадь основной диаграммы транспортного потока, построенной для эталонных условий на данном участке дороги, сокращается слева сверху. В зависимости от величины снижения скорости может измениться или не измениться величина пропускной способности.
2 вид – деформация по скорости и плотности. В этом случае при деформации одного или более факторов происходит одновременно при фактической скорости движения и увеличения расстояния между автомобилями. Площадь основной диаграммы ограничивается слева, сверху и справа. Этот вид деформации получил наибольшее распространение и наиболее вероятен при снижении сцепления, во время дождя, снегопада, метели и других метеоявлений, а также при их сочетании.
Заключение
Таким образом, на одном и том же участке лесовозной автомобильной дороги может наблюдаться множество различных состояний основной диаграммы транспортного потока и множество значений исходных параметров системы ВАДС.
Как видно из анализа основной диаграммы транспортного потока, пропускная способность лесовозных автомобильных дорог лимитируется двумя ограничениями: плотностью (ограничение 2-го вида) и допустимая скорость движения (ограничение 1-го вида). Отсюда вытекает необходимость исследований этих параметров и прежде всего допустимой скорости и плотности транспортного потока при различных состояниях дорог и метеорологических условиях для управления системой ВАДС. Это дает возможность в зависимости от стратегических задач выбирать те или иные воздействия.
Библиографическая ссылка
Скрыпников А.В., Козлов В.Г., Чернышова Е.В., Микова Е.Ю., Ломакин Д.В. ИНФОРМАЦИОННАЯ МОДЕЛЬ УПРАВЛЕНИЯ СИСТЕМОЙ ЛЕСОВОЗНЫХ ТРАНСПОРТНЫХ ПОТОКОВ // Современные наукоемкие технологии. 2018. № 7. С. 93-97;URL: https://top-technologies.ru/en/article/view?id=37085 (дата обращения: 03.07.2026).