


Scientific journal
Modern high technologies
ISSN 1812-7320
"Перечень" ВАК
ИФ РИНЦ = 1,279
RECOGNITION OF SITUATIONS AND RISK ASSESSMENT IN THE SINGLE INFORMATION ENVIRONMENT OF THE HARDWARE AND SOFTWARE COMPLEX «SAFE CITY»

Единая информационная среда аппаратно-программного комплекса (АПК) «Безопасный город» призвана создать условия для взаимодействия служб, ответственных за обеспечение как общественного порядка, так и природно-техногенной безопасности, помогать вовремя реагировать на опасные сигналы, поступающие от граждан, или выявлять их самостоятельно, используя имеющиеся в ней подсистемы мониторинга и контроля. Эти системы передают информацию в дежурно-диспетчерские службы для анализа и оценки обстановки, по результатам которых делается вывод о наличии или отсутствии опасных сигналов.
Внедрение системы обеспечения общественной безопасности и правопорядка (в том числе систем интеллектуального видеонаблюдения) является одной из первоочередных задач в рамках мероприятий по развитию и внедрения аппаратно-программного комплекса «Безопасный город» [1].
При этом большое количество информации, поступающей от подсистем мониторинга, особенно видеоизображений, не позволяет оператору обрабатывать весь поток данных достаточно быстро и качественно, что снижает общую эффективность системы наблюдения. Другим важным параметром, влияющим на работу оператора, может быть его психофизическое состояние [2]. Также стоит отметить, что системы видеонаблюдения могут быть полезны при расследовании уже случившегося происшествия, но малоэффективны как средство предотвращения подобных инцидентов. Выделяют следующие основные недостатки систем видеонаблюдения [3]:
- большой объем обрабатываемых данных (количество камер в городе исчисляется тысячами);
- изображение с камеры наблюдения может содержать большое количество объектов.
В этой связи актуальной задачей является разработка интеллектуальных систем для предварительной обработки поступающих данных, с целью выявления потенциально опасных ситуаций, на которые необходимо обратить внимание оператора.
Цель: представить подход к созданию системы распознавания ситуаций и оценки рисков для АПК «Безопасный город».
Решение задачи
Для создания интеллектуальной системы предварительной обработки данных, поступающих от систем наблюдения, могут быть использованы механизмы поиска взаимосвязей в больших массивах данных (Data Mining) [4]. В этом подходе предлагается с помощью механизмов интеллектуального анализа данных решать задачи классификации и кластеризации объектов (человек, группа людей, транспорт и т.д.), выявлять часто встречающиеся совместно наборы объектов на основе анализа множества повторяющихся событий (зная, при каких условиях наиболее часто совершаются преступления, можно принять меры для их предотвращения).
Предварительная обработка данных, поступающих от систем мониторинга, может быть полезна для обнаружения объектов или потенциально опасных ситуаций [4]:
- распознавание оставленных предметов (сумки, коробки и др.);
- распознавание лиц;
- проникновение в «закрытую» зону и выход из нее;
- появление объекта в кадре;
- изменение сцен и др.
Помимо распознавания и классификации объектов видеонаблюдения, современные интеллектуальные системы видеонаблюдения позволяют отслеживать перемещение объекта видеонаблюдения. С помощью предварительного видеоанализа также решаются такие задачи охраны и контроля объектов видеонаблюдения, как [5]:
- определение интенсивности потока в определенной зоне;
- подсчет объектов видеонаблюдения;
- отслеживание путей объектов видеонаблюдения (например, маршрут движения нарушителя).
После обнаружения объектов и потенциально опасных ситуаций важно оценить риски, которые несет происшествие с точки зрения безопасного функционирования города как единой системы. Система распознавания ситуаций и оценки рисков для информационной среды аппаратно-программного комплекса «Безопасный город» должна не только выявлять подозрительные объекты и отдельные опасные события или процессы, но и оценивать возможные последствия для города в целом.
Рассмотрим задачу распознавания опасной ситуации с помощью механизмов интеллектуального анализа данных в рамках аппаратно-программного комплекса «Безопасный город» более подробно. Поскольку на первом этапе поступают данные от подсистем мониторинга в необработанном виде (видеопоток, данные с датчиков и другие сигналы), необходимо произвести предварительную обработку поступивших данных с целью поиска на изображении различных объектов: людей, автомобилей, сумок и т.д., а также событий или процессов, которые могут привести к опасности: пересечение линии, скопление людей и т.п. В связи с тем, что в дежурно-диспетчерские службы информация о происшествиях может поступать от граждан, в качестве первичных данных также могут быть использованы эти сообщения (Z). В качестве средств распознавания предлагается использовать системы интеллектуального видеонаблюдения, собирающие и обрабатывающие первичную информацию, например нейронные сети, осуществляющие поиск и распознавание объектов на изображении. Стоит отметить, что на данном этапе интересны любые объекты, попавшие в систему мониторинга, даже те, которые, на первый взгляд, не представляют опасности. Таким образом, в результате первичного анализа имеем некоторые множества объектов (O) и потенциально опасных событий или процессов (S).
O = Fo (V, P, Z),
S = Fс (V, P, Z),
где V – первичные данные, поступающие от видеокамер;
P – первичные данные, поступающие от различных датчиков (датчики температуры, задымления и др.);
Z – сообщения, поступающие от граждан (например, звонки дежурному о подозрительном скоплении людей);
Fo – функция распознавания объектов;
Fc – функция распознавания простейших ситуаций.
Далее полученные данные анализируются с точки зрения возникновения опасной ситуации. На данном этапе выявленные объекты (O) и потенциально опасные события или процессы (S) оцениваются относительно той местности, где они были обнаружены: район, парк, опасный перекресток, вокзал и т.п. – с целью поиска потенциально опасных ситуаций, присущих данному месту (обозначим информацию о местности через М).
Таким образом, после обработки данных имеем некоторое распознанное множество объектов (Ot) и потенциально опасных событий или процессов (St), описывающих текущую общую ситуацию (U) для местности (Mt), в которой происходит сбор данных:
U = <Ot, St, Mt>.
В качестве интеллектуальной подсистемы анализа текущей ситуации может служить продукционная база правил, содержащая в себе описание некоторых объектов, опасных событий и процессов, которые могут привести к опасности с учетом местности, в которой проводятся наблюдения [6]. База правил (B) может быть описана следующим кортежем:
B = <O', S', M', X, Y>,
где O' – множество объектов;
S' – множество опасных событий или процессов;
M' – информация о местоположении;
X – множество условий;
Y – множество действий.
Поиск опасных ситуаций в общем виде может быть представлен следующим образом:
если  ,
,  и X(U, b), то y, где
и X(U, b), то y, где  .
.
То есть если в базе правил существует такое правило b, которое применимо к текущей ситуации U, то в результате имеем на выходе некоторый частный результат y, содержащий в себе информацию об опасности или безопасности наблюдаемой ситуации.
Использование продукционных баз правил имеет ряд достоинств:
- простота создания, пополнения, модификации и понимания правил;
- простота механизма логического вывода;
- возможность параллельной и асинхронной обработки правил.
При проектировании продукционной базы правил важно понимать, что система распознавания опасных ситуаций будет функционировать в условиях неопределённости, из-за влияния антропогенного фактора, так как в процессе распознавания ситуации человек может являться непосредственным участником или причиной данной ситуации. Неопределенность обусловлена незнанием закономерностей протекания процессов ввиду их сложности и малоизученности. В этих условиях наиболее удобным математическим аппаратом для описания и исследования подобных систем может быть нечеткое когнитивное моделирование, которое позволяет формализовать численно неизмеримые факторы, использовать неполную, нечеткую и даже противоречивую информацию [7].
Кроме этого, можно выделить следующие преимущества нечетких систем [8]:
- возможность оперировать нечёткими данными (значения, которые невозможно задать однозначно);
- возможность формулировать критерии оценки в нечетком виде;
- возможность проведения качественных оценок входных данных и выходных результатов;
- возможность проведения сравнительного анализа сложных динамических систем с заданной степенью точности.
После проведения анализа текущей ситуации система делает выводы о наличии или отсутствии опасности. В случае обнаружения опасности необходимо оценить риски, которые несет данная опасная ситуация. Для этого необходимо выявить угрозы, которым могут быть подвергнуты объекты на рассматриваемой местности Mt в результате возникновения данной опасной ситуации. Затем следует оценить величины ущербов и вероятности их причинения со стороны всех угроз, которые возможны в данной ситуации, с учетом предпринятых защитных мер.
Для оценки рисков предлагается использовать математическую модель, представленную кортежем:
RSK = <G, Q, α, R>,
где G – граф, отражающий взаимосвязь основных концептов, участвующих в оценке рисков (рис. 1);
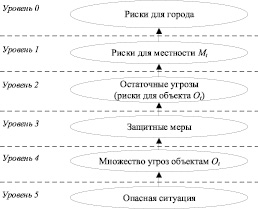
Рис. 1. Уровни графа G оценки рисков
Q – множество оценок значений параметров (показателей ущерба и вероятности);
α – множество весов ребер графа G;
R – множество правил агрегирования влияния различных концептов нижнего уровня на концепт верхнего уровня [9, 10].
На нижнем, 5-м уровне располагаются концепты, отражающие характеристики опасной ситуации. Каждая опасная ситуация в общем случае может порождать множество угроз объектам. Концепты, отражающие вероятность и потенциальный ущерб от возникновения угроз, находятся на 4-м уровне. На 3-м уровне располагаются концепты, отражающие эффективность принятых защитных мер. 2-й уровень иерархии отражает риски для объектов (остаточные после воздействия защитных мер показатели вероятности и ущерба). Концепты предпоследнего, первого, уровня отражают риски для местности (Mt), в которой происходит сбор данных. При этом каждая Mt имеет разную степень важности для безопасности города в целом. На нулевом уровне расположены риски для города в целом.
По результатам оценки каждая опасная ситуация будет представлена множеством пар чисел (ущерб; вероятность), характеризующих риски нарушения безопасности города в целом.
Далее информация о ситуации, а также результаты оценки рисков передаются лицу, принимающему решение (ЛПР), для выработки управленческих решений.
Как было отмечено выше, одна опасная ситуация может породить целую гамму угроз с различными показателями ущерба и вероятности их возникновения. В итоге может получиться, что одному и тому же значению возможного ущерба соответствуют разные вероятности. На первый взгляд может показаться, что в таком случае, с целью сокращения количества вычислений, на 4-м и 2-м уровнях модели можно выбрать для каждого ущерба максимальное значение вероятности его возникновения и в дальнейших вычислениях использовать только их. Однако такое «отсеивание» некорректно, поскольку, во-первых, может исказиться результат оценки рисков на верхних уровнях модели, а во-вторых, ЛПР будет обладать неполной информацией об опасной ситуации, что повлияет на правильность принимаемых им решений. Не учитывать в процессе оценки и последующей выработки управленческих решений целесообразно лишь угрозы, показатели ущерба и (или) вероятности которых незначимы для ЛПР (т.е. ущербы и вероятности, не превышающие заранее заданное минимальное значение, принимаемое ЛПР во внимание).
Алгоритм распознавания ситуаций и оценки рисков для информационной среды аппаратно-программного комплекса «Безопасный город» представлен на рис. 2.
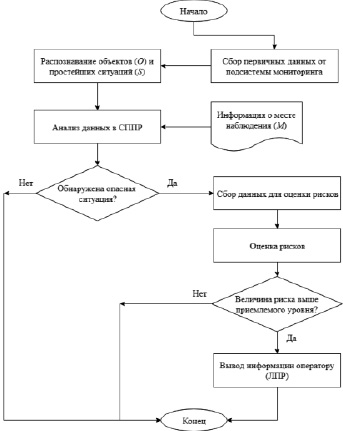
Рис. 2. Алгоритм распознавания ситуаций и оценки рисков
Заключение
Таким образом, представлен подход к созданию системы распознавания ситуаций и оценки рисков для информационной среды аппаратно-программного комплекса «Безопасный город» с учетом имеющихся рекомендаций по его построению и развитию. Система строится на основе интеллектуальных методов, реализует процесс распознавания и оценки рисков в несколько этапов и предоставляет результат ЛПР в виде конкретной описанной ситуации и предварительной оценки рисков, что позволит повысить качество работы подсистем мониторинга и уменьшить время реагирования на опасные ситуации.
Библиографическая ссылка
Марьенков А.Н., Выборнова О.Н., Досмухамедов Б.Р. РАСПОЗНАВАНИЕ СИТУАЦИЙ И ОЦЕНКА РИСКОВ В ЕДИНОЙ ИНФОРМАЦИОННОЙ СРЕДЕ АППАРАТНО-ПРОГРАММНОГО КОМПЛЕКСА «БЕЗОПАСНЫЙ ГОРОД» // Современные наукоемкие технологии. 2018. № 4. С. 91-96;URL: https://top-technologies.ru/en/article/view?id=36965 (дата обращения: 03.07.2026).