


Scientific journal
Modern high technologies
ISSN 1812-7320
"Перечень" ВАК
ИФ РИНЦ = 1,279
REDUCING THE DIMENSIONALITY OF ATTRIBUTE SPACE IN PROBLEMS OF MARINE TECHNICAL OBJECTS CLASSIFICATION BY A NEURAL NETWORK EXPERT SYSTEM

Целью научно-технических разработок авторов статьи является создание широкомасштабной радиогидроакустической системы освещения атмосферы, океана и земной коры, мониторинга их полей различной физической природы, построение нейросетевой экспертной системы распознавания в общей структуре просветной системы мониторинга, включая комплекс ее автоматизированного управления на основе разработанных авторами архитектур искусственных нейронных сетей и методики их обучения для решения задач распознавания (классификации) технических источников информационных полей в морской среде [1–5]. Некоторые результаты научных разработок авторов по данной тематике отражены в приведенном ниже списке литературы [2, 5–9].
Постановка задачи
Предполагается, что на морском техническом объекте, имеется штатный комплекс средств распознавания и параллельно работающая распознающая система, построенная с использованием искусственных нейронных сетей (рис. 1).
При разработке названной структуры использовались традиционные сети и сети реализующие нечеткие алгоритмы, которые наиболее целесообразны в тех или иных гидрологических условиях [6, 10, 11].
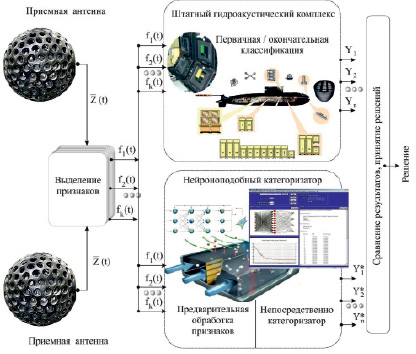
Рис. 1. Функциональная схема гидроакустической системы поиска и классификации
Научная новизна состоит прежде всего в том, что авторами показана возможность применения высокотехнологичных научных методов для решения прикладных задач классификации морских объектов. Предлагается параллельно штатному гидроакустическому комплексу устанавливать нейроноподобный категоризатор, производящий предварительную обработку признаков и классификацию морских объектов.
Под терминами обнаружение и распознавание авторы понимают этап гидроакустического наблюдения, направленный на установление наличия объекта в обследуемой морской акватории. Обнаружение сигнала и извлечение из него полезной информации определяет содержание первичной обработки гидроакустической информации и вследствие случайного характера сигналов и помех может, в некоторых случаях, решаться с использованием аппарата статистической теории [6, 12]. Процесс обнаружения начинается с момента первичного выделения сигнала и заканчивается принятием решения об отнесении обнаруженного объекта к определенному классу. Из-за влияния целого ряда факторов процесс обнаружения морских технических объектов является вероятностным. Эффективность обнаружения может быть охарактеризована дальностью, соответствующей заданной либо выбранной вероятности, а также вероятностными характеристиками, являющимися функцией дистанции до морского объекта и существенно изменяться в условиях воздействия преднамеренных помех.
Параллельно штатному гидроакустическому комплексу установлен нейроноподобный категоризатор, производящий первичную обработку признаков (предварительное сжатие пространства признаков) и категоризацию объектов. На рис. 1 использованы следующие обозначения:  – сигнал на выходе гидроакустической антенны; f1(t), f2(t),…, fk(t) – выделенные временные функции признаков, по которым производится классификация; Y1, Y2,…, Yn – категории (объекты), выделенные штатным распознающим устройством;
– сигнал на выходе гидроакустической антенны; f1(t), f2(t),…, fk(t) – выделенные временные функции признаков, по которым производится классификация; Y1, Y2,…, Yn – категории (объекты), выделенные штатным распознающим устройством;  , – категории (объекты), выделенные нейроноподобным распознающим устройством. Оператор рассматриваемого гидроакустического комплекса имеет возможность сравнивать результаты, полученные на выходе штатного комплекса, и нейроноподобного категоризатора, работающего параллельно с основным. Решение принимается на основании анализа результатов, полученных на выходе обеих систем. Следует отметить, что нейроноподобный категоризатор, реализованный на ограниченных штатных вычислительных средствах погружного аппарата, показал весьма удовлетворительные результаты, сравнимые с работой штатного комплекса, а по времени формирования решения – превосходящие его.
, – категории (объекты), выделенные нейроноподобным распознающим устройством. Оператор рассматриваемого гидроакустического комплекса имеет возможность сравнивать результаты, полученные на выходе штатного комплекса, и нейроноподобного категоризатора, работающего параллельно с основным. Решение принимается на основании анализа результатов, полученных на выходе обеих систем. Следует отметить, что нейроноподобный категоризатор, реализованный на ограниченных штатных вычислительных средствах погружного аппарата, показал весьма удовлетворительные результаты, сравнимые с работой штатного комплекса, а по времени формирования решения – превосходящие его.
Результаты исследования и их обсуждение
В настоящей работе основное внимание уделяется одному достаточно узкому вопросу, связанному с предварительной обработкой информации (сжатием выделенных обобщенных признаков). Полный перечень информационных признаков распознавания позволяет отнести их в сложных гидрологических условиях к классу нечетких информационных признаков. Предварительная обработка признаков необходима для определенного упорядочения сигналов, что значительно упрощает работу нейроноподобного категоризатора. Фактически авторами решалась проблема близкая той, которая вынудила Колмогорова и Хинчина пойти на принятие решения о необходимости предварительной обработки сигнала. Метод Колмогорова и Хинчина не является необходимым, но его достаточность позволяет сжать исходное параметрическое пространство и решить задачу упорядочения в почти реальном масштабе времени с учетом нескольких циклов предыстории. Полученные обобщенные характеристики являются более достоверными, «смягченными». Далее рассмотрим непосредственно работу блока предварительной обработки информации.
Блок предварительной обработки информации (БПИ)
БПИ – это устройство, которое по методике Колмогорова – Хинчина [5, 10] преобразует нестационарный временной процесс его основными статистическими параметрами практически в реальном масштабе времени. Функциональная схема БПИ представлена на рис. 2.
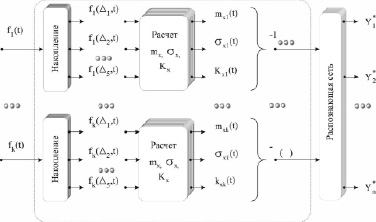
Рис. 2. Блок предварительной обработки информации
Схема реализует названный алгоритм, с помощью которого временные процессы f1(t), f2(t),…, fk(t), содержащие информационные признаки (размерность которых весьма велика), заменяются их статистическими характеристиками: математическим ожиданием mxi, среднеквадратическим отклонением σxi и корреляционным моментом kxi, где i – номер временного процесса.
Идея метода состоит в том, что некоторый нестационарный процесс может быть представлен через классические определения случайной величины и случайной функции, если одновременно рассматривать на некотором интервале Δ конечное число предысторий (дискрет) и собственно процесс в реальном масштабе времени.
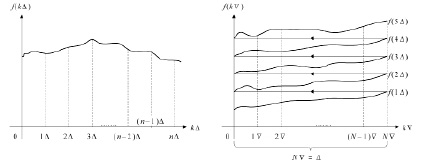
В нашем случае рассматривается и анализируется временная функция признаков f(t), представленная на рис. 3, а.
а) б)
Рис. 3. Временные характеристики: а – временная функция признаков f(t); б – кривые, находящиеся в памяти блока «накопление» f(1Δ), f(2Δ), f(3Δ), f(4Δ) и вводимая в реальном масштабе времени функция f(5Δ)
Следуя выбранной методике, непрерывный процесс f(t) разбивается на ряд дискретных интервалов длительностью Δ, которые накапливаются в памяти.
В это же устройство вводится изучаемый процесс в реальном масштабе времени. На рис. 3, б представлены кривые, находящиеся в памяти блока «накопление» f(1Δ), f(2Δ), f(3Δ), f(4Δ) вводимая в реальном масштабе времени функция f(5Δ).
Все выделенные временные дискреты разбиваются на N равных отрезков, длительностью ∇, в конце которых происходит обработка всех реализаций, и определяются  и
и  , т.е. после анализа интервала
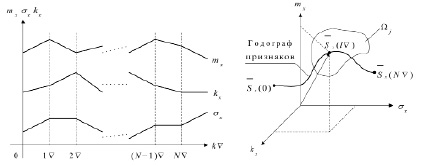
, т.е. после анализа интервала  можно получить информацию, представленную на рис. 4, а, построить вектор
можно получить информацию, представленную на рис. 4, а, построить вектор  , а также годограф «состояния» изучаемого объекта (рис. 4, б). Именно эти величины подаются на вход распознающей сети для проведения процесса классификации объекта по критерию
, а также годограф «состояния» изучаемого объекта (рис. 4, б). Именно эти величины подаются на вход распознающей сети для проведения процесса классификации объекта по критерию  .
.
а) б)
Рис. 4. Выходные характеристики блока предварительной обработки сигнала:
а – вектор  ; б – годограф «состояния» объекта
; б – годограф «состояния» объекта
Описанной обработке подвергаются все временные процессы признаков. Таким образом, на вход распознающей сети в каждый момент времени подаются три обобщенные характеристики, по которым проводится категоризация, т.е.  – один из входных векторов распознающей сети, характеризующий процесс fk(t) в рассматриваемый момент времени t.
– один из входных векторов распознающей сети, характеризующий процесс fk(t) в рассматриваемый момент времени t.
На основании проведенного анализа возможных сетевых структур, решающих задачу классификации, выбраны (ИНС) типа персептрон и сеть Кохонена. В качестве выходного каскада и в первом и во втором варианте использована структура Гроссберга. Нечеткий вариант распознавания реализован нечеткой сетевой структурой ANFIS (Adaptive Neuro-Fuzzu Inference System). Совершенно очевидно, что кроме описанных целевых специальных процедур подготовки данных использовались классические методы, т.е. нормирование, биполяризация и др. Результаты n экспериментов над системой m случайных величин
X(t1), … X (tm) приведены в таблице.
Результаты n экспериментов над системой m случайных величин X(t1), … X(tm)
|
Временные сечения |
t1 |
t2 |
t3 |
… |
tm-1 |
tm |
|
1 |
2 |
3 |
4 |
… |
m – 1 |
m |
|
x1(t) |
x1(t1) |
x1(t2) |
x1(t3) |
… |
x1(tm-1) |
x1(tm) |
|
x2(t) |
x2(t1) |
x2(t2) |
x2(t3) |
… |
x2(tm-1) |
x2(tm) |
|
… |
… |
… |
… |
… |
… |
… |
|
xn(t) |
xn(t1) |
xn(t2) |
xn(t3) |
… |
xn(tm-1) |
xn(tm) |
|
Второй этап |
||||||
|
|
mx(t1) |
mx(t2) |
mx(t3) |
… |
mx(tm-1) |
mx(tm) |
|
|
Dx(t1) |
Dx(t2) |
Dx(t3) |
… |
Dx(tm-1) |
Dx(tm) |
|
|
Kx(t1,t1–?) |
Kx(t1,t2–?) |
Kx(t1,t3–?) |
… |
Kx(t1,t tm–1–?) |
Kx(t1,tm–?) |



Выводы
В заключение следует отметить, что нейроноподобные распознающие сети имеют право на существование и весьма перспективны. Сети, построенные на бортовых вычислительных комплексах погружного аппарата, имеющих весьма ограниченные возможности, по многим параметрам оказались весьма конкурентоспособны со штатным гидроакустическим комплексом. При времени наблюдения изучаемого объекта около 6–10 минут вероятность правильной классификации не ниже 85 %, а при классификации объектов типа надводный или подводный объект названная вероятность не менее 97 %.
Использованная методика предварительного сжатия информации по методу Колмогорова – Хинчина может быть использована для обработки любых информационных временных процессов, содержащих признаки, подлежащие категоризации. Для технической реализации нейроноподобного категоризатора удобно использовать модули гибкой логики, например, программируемые логические модули (ПЛИС), различных производителей.
Библиографическая ссылка
Пятакович В.А., Василенко А.М. ОБРАБОТКА РАЗМЕРНОСТИ ПРИЗНАКОВОГО ПРОСТРАНСТВА ДЛЯ ЗАДАЧ КЛАССИФИКАЦИИ МОРСКИХ ТЕХНИЧЕСКИХ ОБЪЕКТОВ НЕЙРОСЕТЕВОЙ ЭКСПЕРТНОЙ СИСТЕМОЙ // Современные наукоемкие технологии. 2017. № 8. С. 50-55;URL: https://top-technologies.ru/en/article/view?id=36779 (дата обращения: 17.07.2026).