


Scientific journal
Modern high technologies
ISSN 1812-7320
"Перечень" ВАК
ИФ РИНЦ = 1,279
ABOUT TOOLS FOR CONSTRUCTING ALGORITHMS OF DIGITAL REGULATION

Актуальность исследования
Принято считать, что регулятор относится к цифровым (контурным) регуляторам (ЦКР), когда задается цифровым образом либо уставка, либо регулируемая величина, либо настроечные параметры, либо вычисляется управляющее воздействие в соответствующем гибридном сигнальном процессоре или попросту в микроконтроллере регулятора. Если в цифровом регуляторе именно вычисляется управляющее воздействие, то он относится к классу устройств прямого цифрового управления (Direct Digital Control) или регулирования. ЦКР может использоваться как локальный регулятор, так и в структуре автоматизированной системы управления технологическими процессами (АСУТП), где потоки цифровых данных из уровня управления технологическими операциями (Control) АСУТП в ЦКР могут относиться к заданию уставок, настроечных параметров или к управлению структурой алгоритмов определения значений управляющих воздействий, в частности к выбору алгоритма.
В первых цифровых регуляторах 1970-х гг. (семейство приборов модели 80 («Doric Scientific»); модели DCP 7700 («Honeywell»); DCM 1000 («Robertshaw»); Micro-Scan («Taylor Instrument»); одноконтурные микропроцессорный регулятор 5260R («Taylor Instrument»); отечественный универсальный цифровой регулятор на основе микроЭВМ «Электроника С5-11» (1978 г.) [2]), а также в исследованиях отечественных учёных (Деткин Л.П. Микропроцессорные системы управления и регулирования вентильными электроприводами. М.: Информэлектро, 1980. 112 с.; Файнштейн В.Г., Файнштейн Э.Г. Микропроцессоры и микроЭВМ в системах автоматического управления электроприводами. М.: Информэлектро, 1985. 41 с.; Файнштейн В.Г., Файнштейн Э.Г. Микропроцессорные системы управления тиристорными электроприводами. М.: Энергоатомиздат, 1986. 240 с.) алгоритмы регулирования отрабатывали все вычислительные операции дискретного преставления континуальной модели регулятора на каждом шаге опроса датчиков (шаге дискретизации). Это, естественно, приводило к относительно высоким временным затратам на вычисление управляющего воздействия.
В 1994 г. профессор В.М. Мазуров (Мазуров В.М. Принципы построения и методы реализации оптимальных и адаптивных регуляторов для объектов с запаздыванием: автореф. дис. док. техн. наук: 05.13.01. Тула, 1994. 40 с.) предложил итерационную формулу расчёта управляющего воздействия в текущий момент времени от его значения в предыдущий момент времени, заменяя при этом интеграл в континуальной модели пропорционально-интегрально-дифференциального (ПИД) регулирования по формуле прямоугольников, что существенно сократило время вычислений. До настоящего времени процессы прямого цифрового регулирования фактически основываются именно на этой итерационной форме [например, 1, 6].
В 2003 г. проф. А.Г. Леонтьев [1] отметил возможную эффективность замены интеграла в континуальной модели ПИД-регулятора по формуле трапеций. Позже в работе [2] был предложен пакет итерационных формул расчета управляющего воздействия при замене интеграла континуальной модели по формулам прямоугольника, трапеции и Симпсона, а в сравнительном исследовании [4, 5] показано, что:
1) для разных наборов настроечных параметров могут быть эффективными различные дискретные модели регулирования;
2) для разных наборов настроечных параметров и разных дискретных моделей регулирования может быть различной динамика регулируемого параметра вплоть до различий поведения регулируемого параметра в установившемся режиме. Таким образом, оказалось, что ни изменение дискретной модели регулирования путем более точного перехода от континуальной к дискретной модели ПИД-регулирования, ни вариации настроечных параметров не указывают пути целенаправленного повышения эффективности цифрового регулирования, а основная нагрузка ложится на формирование подходящей структуры алгоритмов.
Это указывает на актуальность решения вопросов по созданию программных инструментальных средств конструирования алгоритмов прямого цифрового регулирования и автоматизации процесса создания алгоритмов на их основе в конкретном процессе регулирования. В работе предлагается структура программного инструментария для конструирования алгоритмов прямого цифрового регулирования.
Современная «конструкторская» среда программного инструментария
Многообразие систем моделирования процессов регулирования или проектирования средств промышленной автоматики при любом варианте их реализации представляют собой набор программного инструментария в структуре диалога с оператором для организации и проведения процесса моделирования (симуляции, имитации, верификации и пр.), то есть наблюдения, регистрации и отображения динамики целевых параметров. Среди систем моделирования процессов регулирования можно выделить несколько групп:
1) системы моделирования, которые реализуют синтез регулятора. Это фактически решение типовых задач теории автоматического управления (ТАУ) [7]:
а) по определению и реализации передаточной и импульсной переходной функции или частотных характеристик согласно выбранному критерию оптимальности (быстродействие, квадратичный или степенной критерий) или заданных показателей качества (установившаяся ошибка, время переходного процесса, перерегулирование), согласно априорным данным о задающих и возмущающих воздействиях, согласно реальным ограничениям собственно объекта управления или неизменяемой части системы (ограниченная мощность, допустимые перегрузки), а также согласно условиям физической осуществимости и грубости;
б) по определению динамических свойств, точности и устойчивости системы по заданной её структуре и известным параметрам. Результатом моделирования является полная формальная модель регулятора;
2) системы моделирования по формированию математической модели объекта управления, включая системы идентификации [8], которые относят к автоматизированным системам научных исследований (АСНИ);
3) системы моделирования, которые фактически реализуют результаты синтеза регулятора и результаты АСНИ по установлению формальных моделей объекта управления для конструирования конкретных электронных или электротехнических схем. Если такие системы моделирования заканчиваются созданием технологической документации для изготовления конкретных изделий, то нередко их называют системами автоматизированного проектирования или автоматизации проектирования (САПР).
Если синтез регуляторов – это общеизвестная «технология» проектирования, то АСНИ и САПР, как правило, это корпоративные ресурсы не всегда открытого доступа. В настоящее время среди программ для разработки систем управления с цифровыми регуляторами выделяются:
1) система MexBIOS Development Studio как система автоматизированного проектирования цифровых устройств управления (А.С. Каракулов, В.С. Саидов, С.В. Ляпушкин, Н.В. Гусев, М.В. Сливенко, Г.В. Родионов; ООО «Научно-производственная фирма Мехатроника-Про»; Свидетельство о гос. регистрации программ для ЭВМ № 2013617346, 2013), заявленная как программа, которая предназначена для разработки алгоритмов встроенных систем управления на базе микроконтроллеров. Здесь алгоритмы разрабатываются и моделируются визуально или в текстовом виде с использованием пополняемой библиотеки блоков;
2) пакет Standard PID Control («Siemens AG»), предназначенный для проектирования семейства программируемых логических контроллеров (ПЛК) SIMATIC S7, состоит из инструментария для настройки регуляторов и стандартных функциональных блоков, которые содержат заданные алгоритмы регулирования с фиксированной структурой данных. Возможно отображение до четырех кривых сигналов на графопостроителе. Программное обеспечения позволяет создавать новые алгоритмы, ориентированные только на семейство ПЛК SIMATIC S7;
3) пакет Modular PID Control («Siemens AG»), применяемый для создания сложных структур систем автоматического регулирования, в состав которого входят 27 стандартных функциональных блоков для формирования структуры регулятора с ориентацией на семейство SIMATIC S7;
4) пакет PID Self Tuner («Siemens AG»), позволяющий подбирать настроечные параметры ПИД-регулятора, работающего на базе ПЛК SIMATIC S7. Отличительной особенностью программного обеспечения является наличие функций доработки регуляторов с приданием им функций самонастройки;
5) пакет Matlab со средой моделирования Simulink («The MathWorks»), предназначенный для имитационного моделирования динамических систем. В работe [9] демонстрируются примеры моделирования схем систем автоматического управления;
6) программа VisSim («Visual Solution») для моделирования и проектирования систем управления и цифровой обработки сигналов. Оценки показывают, что при всей полноте и широте возможностей отмеченных программных продуктов они фактически лишены необходимого арсенала инструментальных средств именно для конструирования алгоритмов прямого цифрового регулирования.

Рис. 1. Структура программного инструментария конструирования алгоритмов цифрового ПИД-регулирования
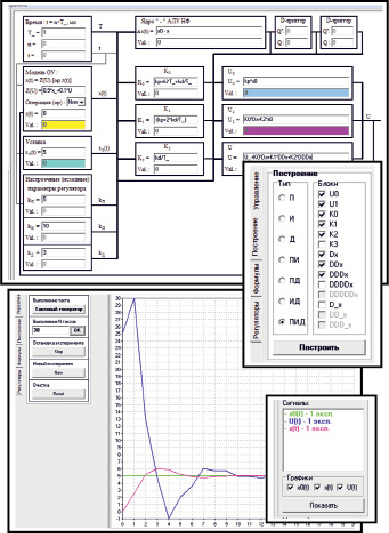
Рис. 2. Конструирование и моделирование логической схемы цифрового ПИД-регулятора на основе классической итерационной формулы прямоугольника
Структура программного инструментария
Исходя из предназначения инструментария, его структура, по-видимому, должна определяться двумя системными положениями:
1) тем, что будет реализовываться процесс прямого цифрового регулирования целостной структурой «цифровой ПИД- регулятор – объект управления (ОУ)»;
2) тем, что качество процесса регулирования существенно обусловлено именно алгоритмом регулирования и его структурой. В соответствии с этим предлагаемая структура программы непременно должна включать инструментарий (рис. 1):
1) конструирования логической схемы функционирования цепи регулирования посредством:
а) задания математической модели объекта управления и внешнего возмущения;
б) конструирования переменной логической структуры цифрового регулятора и алгоритма вычисления управляющих воздействий. Основываясь на формулах прямоугольника, трапеции и Симпсона [2–5], структура регулятора может включать блоки задания: управляющего воздействия U0 в момент времени t = 0; управляющего воздействия U1 при t = T; управляющего воздействия U2 в момент времени t = 2T; управляющего воздействия U(nT); вспомогательных коэффициентов K0, K1, K2, K3; рассогласования ?x(nT); настроечных параметров kП, kИ и kД; уставки x0;
2) варьирования настроечными параметрами и периодом дискретизации для подбора алгоритма регулирования;
3) управления процессом моделирования (пуск, останов);
4) отображения результатом моделирования в табличном и графическом виде (регулируемый параметр x(t), рассогласование ?x(t), управляющее воздействие U(t));
5) ведения истории экспериментов для оперативного сохранения логических структур и алгоритмов регулирования и выбора экспериментов для отображения и сравнения;
6) ведения истории формул для оперативного сохранения и ввода формулы в блок логической структуры регулятора или объекта управления.
Предложенная структура программного инструментария, реализованная в программных продуктах: «Программа регулирования для моделирования несанкционированного изменения настроечных параметров регулятора» (Захарова О.В., Самбьену К.К., Тшанати Й.Ф., Раков В.И.; Свидетельство о государственной регистрации программы для ЭВМ № 2014660633 от 13.10.2014 г.) и «Программный инструментарий ПИД-регулирования на базе арифметико-логического устройства непосредственного формирования» (Захарова О.В., Солдатов С.С., Самойлов Д.А., Раков В.И.; Свидетельство о государственной регистрации программы для ЭВМ № 2013611762 от 04.02.2013 г.), показала приемлемые возможности конструирования алгоритмов цифрового регулирования для подбора подходящей динамики регулируемого параметра, а моделирование логической схемы замкнутого контура с цифровым регулятором и алгоритмом ПИД-регулирования по традиционной формуле прямоугольника (рис. 2) – удобство, производительность и утилитарную ценность предложенных инструментальных средств.
В целом экспериментирование с использованием предложенного инструментария показало широкие возможности конструирования алгоритмов цифрового регулирования, основанного на формулах прямоугольника, трапеции и Симпсона и отличающегося заданием произвольных математических моделей цифрового регулятора и объекта управления.
Исследование выполнено при поддержке «ОГУ имени И.С. Тургенева» по теме «Разработка программной системы поддержки процесса управления в предаварийных состояниях для восстановления нормальной работы», приказ № 7-н/26 от 23.10.2013 г.
Библиографическая ссылка
Захарова О.В., Раков В.И. О ПРОГРАММНОМ ИНСТРУМЕНТАРИИ ДЛЯ КОНСТРУИРОВАНИЯ АЛГОРИТМОВ ЦИФРОВОГО РЕГУЛИРОВАНИЯ // Современные наукоемкие технологии. 2016. № 11-2. С. 255-259;URL: https://top-technologies.ru/en/article/view?id=36395 (дата обращения: 08.07.2026).
DOI: https://doi.org/10.17513/snt.36395