


Scientific journal
Modern high technologies
ISSN 1812-7320
"Перечень" ВАК
ИФ РИНЦ = 1,279
SYSTEM OF SITUATIONAL MANAGEMENT BY RISKS IN THE CONFLICTING OF COMPLEXES OF UNMANNED AERIAL VEHICLES AND AN AIR DEFENSE

Современные тенденции ведения боевых действий неоспоримо ведут к конфликту комплексов беспилотных летательных аппаратов (БЛА) ударного назначения (УН) [5] и противовоздушной обороны (ПВО). Наиболее характерной ситуацией может быть оборона критически важных объектов (КВО) комплексом ПВО при поражении КВО группой БЛА УН [1], что сопровождается рисками обоих комплексов [2, 3].
В этом случае в составе комплекса БЛА УН по функциональному признаку можно выделить три составляющих: команду управления (лицо, принимающее решение – ЛПР), территориально размещаемую на пункте управления (ПУ), пусковую установку, N-БЛА УН. В общем случае может быть несколько комплексов БЛА УН.
В процессе конфликта со стороны комплекса БЛА УН возникают риски огневого воздействия на ПУ, что в ряде случаев очень критично, особенно если ПУ совмещен с другими командными пунктами (КП), кроме того, как было сказано выше, риски несет и сама группа БЛА УН.
Решить в определенной мере проблему минимизации рисков (управления рисками) комплекса БЛА УН, в том числе рисков ПУ БЛА УН и совмещенных с ним КП, можно за счет интеллектуализации автономного группового полета БЛА УН на основе создания системы ситуационного управления рисками в конфликте комплексов беспилотных летательных аппаратов и противовоздушной обороны, что, по-видимому, в известных источниках не рассматривалось.
Целью работы является разработка системы ситуационного управления рисками конфликта комплексов ударных беспилотных летательных аппаратов и противовоздушной обороны.
Рассмотрим сущность функционирования БЛА УН с точки зрения рисков. Задачей комплекса БЛА УН является нанесение системе ПВО и защищаемым этой системой КВО максимального ущерба минимальными средствами. Эффективность решения этой задачи целесообразно оценивать величиной риска (ущерба), вычисляемого по формуле [2]
 (1)
(1)
где Pai – вероятность реализации успешной атаки i-м БЛА УН,  , за определенный промежуток времени T; Puzi – вероятность уязвимости (преодоления) системы ПВО i-м БЛА УН; ущербом Ci, возникающим в результате успешной атаки i-го БЛА УН на систему ПВО и КВО.
, за определенный промежуток времени T; Puzi – вероятность уязвимости (преодоления) системы ПВО i-м БЛА УН; ущербом Ci, возникающим в результате успешной атаки i-го БЛА УН на систему ПВО и КВО.
Процесс боевого применения комплекса БЛА УН условно разделяют на следующие этапы [3]: старт БЛА (набор высоты и скорости); решение задачи навигации (полет в район цели); преодоление ПВО противника; наведение БЛА на цель и выход в атаку; поражение цели; возвращение на аэродром посадки. Тогда вероятность реализации успешной атаки i-м БЛА УН можно определить по следующей формуле [3]:
Pai = Pстi•Pнi•Pатi•Pцi•Pвi, (2)
где Pстi – вероятность успешного выполнения старта i-м БЛА УН; Pнi – вероятность успешного решения задачи навигации (полет к цели) i-м БЛА УН; Pатi – вероятность наведения i-го БЛА УН на цель и выхода в атаку; Pцi – вероятность поражения цели i-м БЛА УН (выполнения боевой задачи); Pвi – вероятность возвращения i-го БЛА УН на аэродром посадки.
Наиболее острым моментом применения группы БЛА-снарядов является прорыв системы ПВО и огневое поражение критически важных объектов (КВО) противника, в ходе которого БЛА-снаряды будут уничтожаться различными вариантами средств ПВО. Кроме огневого воздействия сторона, обороняющаяся от нападения БЛА-снарядов, может применять средства радиоэлектронного подавления и радиоэлектронного поражения, а также вмешиваться в канал управления В ходе прорыва системы ПВО наблюдается максимум взаимных потерь.
Вероятность уязвимости системы ПВО Puzi i-м БЛА УН равна вероятности преодоления системы ПВО PПВОi i-м БЛА УН [3].
Управление рисками в конфликте комплексов БЛА и ПВО должно основываться на получении дискретных оценок риска в любой момент времени в процессе выполнения комплексом БЛА боевых задач. Использование дискретных показателей риска позволит без ограничения размерности задачи наблюдать динамику изменения рисков комплекса БЛА в процессе выполнения боевой задачи. Наряду с этим возможность получения дискретных оценок риска комплекса БЛА в любой момент времени позволит осуществлять управление комплексом в процессе выполнения им боевой задачи.
Управление рисками в конфликте комплексов БЛА и ПВО должно зависеть от ситуации, которая складывается на потоках дискретных оценок риска в любой момент времени в процессе выполнения боевой задачи. Для управления рисками целесообразно выбрать ситуационное управление [4]. Структура процесса ситуационного управления рисками в конфликте комплексов БЛА и ПВО представлена на рис. 1.
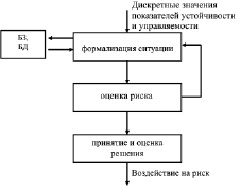
Рис. 1. Структура ситуационного управления
Для принятия решения в процессе оперативного управления необходимо иметь данные о состоянии входного потока оценок риска БЛА в определенные моменты времени. Эта информация часто поступает в виде качественных оценок. Информация с потока поступает с временной задержкой, что приводит к ее устареванию и, как следствие, частичной потере достоверности.
Таким образом, в рассматриваемом случае детерминированные методы не эффективны и не пригодны, так как при расчетах практически не принимается во внимание неопределенность и нечеткость оценок риска, которые влияют на результаты принимаемого решения.
Так как угрозы комплексу БЛА можно считать единичными событиями, и каждая из угроз может иметь индивидуальные особенности и принадлежать к разным классам угроз, то часто это обуславливает отсутствие выборки достаточного объема, которая позволила бы использовать методы теории вероятности и математической статистики для формирования управленческих решений. Поэтому для описания ситуаций, складывающихся на потоках, их оценки и формирования управления целесообразно использовать методы, основанные на теоретико-множественном подходе. Такой подход дает возможность описать функционирование потока, а управление сделать гибким и адаптивным к изменяющимся условиям функционирования потока.
Ситуация sti на потоке событий описывается множеством лингвистических переменных.
 (3)
(3)
где βi (i = 1, 2, ..., m) – лингвистическая переменная. Лингвистическая переменная характеризуется набором:
 (4)
(4)
где β – имя лингвистической переменной; T(β) – терм-множество лингвистической переменной β, которое является нечетким множеством вида
 (5)
(5)
где y – терм;  – функция принадлежности; X – область определения лингвистической переменной.
– функция принадлежности; X – область определения лингвистической переменной.
Например, лингвистическая переменная «риск БЛА УН» имеет термы: высокий, средний, низкий. Область определения от 0 до 1.0. Функции принадлежности будут иметь вид представленный на рис. 2.
Так как управление рисками в конфликте комплексов БЛА УН и ПВО является сложной и многофункциональной задачей, то для ее решения необходимо создание экспертной советующей системы, основанной на принципах ситуационного управления. Ситуационные советующие системы управления с нечеткой логикой делятся на два вида [4]: «ситуация – действие»; «ситуация – стратегия управления – действие». Различие между ними заключается в методе поиска управляющего решения.
К числу основных стратегий управления относятся, например, следующие:
– организация ложной атаки БЛА УН на ПВО;
– при наличии помех в канале спутниковой навигационной системы переход к инерциальной навигации;
– при наличии узкополосных помех в каналах управления и передачи данных применение адаптивной режекции;
– при высокой активности средств ПВО снижение высоты полета;
– при идентификации средств ПВО с пассивной инфракрасной системой самонаведения заход на атаку со стороны солнца и др.
Принятие решений о применении тех или иных стратегий управления в процессе выполнения боевой задачи комплексом БЛА УН должно осуществляться на основе оценивания рисков с использованием соответствующих моделей прогнозирования рисков.
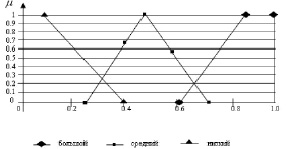
Рис. 2. Функция принадлежности лингвистической переменной «остаточный риск ИБ АС»
В системах «ситуация – действие» управляющие решения заданы в явном виде и представляют собой нечеткую базу знаний (НБЗ), которая оформлена в виде таблицы решений. Процедура вывода решения заключается в сопоставлении описания текущего состояния объекта управления со всеми эталонными ситуациями, выборе наиболее близкой, в некотором смысле эталонной ситуации и выдаче соответствующего ей управляющего решения. Для создания базы знаний – таблицы решений системы управления типа «ситуация – действие» необходимо определить соответствие между всеми возможными эталонными ситуациями, для которых определены управляющие воздействия, и набором управляющих решений.
В таблице sti – эталонная ситуация, Ui – управляющее решение. Размер таблицы решений определяется числом эталонных ситуаций.
Таблица решений
|
st1 |
U1 |
|
st2 |
U2 |
|
… |
… |
|
stn |
Un |
Для определения состояния объекта управления необходимо сравнить входную нечеткую ситуацию st0 с каждой ситуацией из набора эталонных нечетких ситуаций:
st = {st1, st2, ..., stnn}. (6)
В качестве меры для определения степени близости входной нечеткой ситуации st0, возникшей на потоке, и sti из набора эталонных нечетких ситуаций st могут использоваться:
– степень нечеткого включения входной нечеткой ситуации st0 в нечеткую ситуацию sti;
– степень нечеткого равенства st0 и sti;
– степень нечеткой общности st0 и sti, а также другие меры близости.
Выбор меры близости определяется особенностями объекта управления и организацией блока принятия решения. В качестве меры близости используем степень включения, потому что она обладает наибольшей степенью достоверности при определении принадлежности входной нечеткой ситуации к эталонной ситуации.
Пусть 
 (y ∈ Y) есть некоторые ситуации. Степень включения ситуации sti – в ситуацию stj определяется выражением
(y ∈ Y) есть некоторые ситуации. Степень включения ситуации sti – в ситуацию stj определяется выражением
 (7)
(7)
Ситуация st0 – нечетко включается в ситуацию sti, st0 ∈ sti, если степень включения st0 в sti не меньше порога включения tinp, определяемого условиями управления, т.е. ν(st0, sti) ≥ tinp. Таким образом, ситуация st0 нечетко включается в ситуацию sti, если нечеткие значения признаков ситуации st0 нечетко включаются в нечеткие значения соответствующих признаков ситуации sti.
Для оптимизации поиска ситуации sti, наиболее близкой к входной ситуации st0, на множестве st строится иерархия эталонных ситуаций в форме диаграммы Хассе, которая представляет собой ориентированный граф [4]. Поиск наиболее сходной эталонной ситуации начинается с верхнего уровня иерархии. Далее рассматриваются ситуации нижних уровней иерархии и т.д. Поиск заканчивается, если:
а) на некотором уровне иерархии в ситуацию sti не включается ни одна ситуация множества st;
б) для любой ситуации stj, включающейся в ситуацию sti, выполняется условие  .
.
В случае, если нет полного включения входной ситуации ни на одну из эталонных, то либо ситуация плохо определена, либо нет эталонной ситуации, соответствующей входной ситуации по всем признакам. В таком случае происходит доопределение ситуации или сравнение производится только по хорошо определенным признакам. У каждой эталонной ситуации в таблице решений существует управляющее решение. Поиск управляющего решения заключается в принятии управляющего решения, соответствующего эталонной ситуации наиболее близкой к входной ситуации.
Таким образом, разработана система, позволяющая осуществлять гибкое управление рисками в конфликте комплексов БЛА УН и ПВО при автономном функционировании комплекса БЛА УН в ходе выполнения боевой задачи. Использование теории нечетких множеств позволит сделать систему управления комплексом БЛА УН более универсальной, способной описать ситуацию в различных условиях выполнения боевой задачи и принять во внимание временную задержку с получением информации с потока.
Библиографическая ссылка
Ананьев А.В., Кащенко Г.А. СИСТЕМА СИТУАЦИОННОГО УПРАВЛЕНИЯ РИСКАМИ В КОНФЛИКТЕ КОМПЛЕКСОВ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ И ПРОТИВОВОЗДУШНОЙ ОБОРОНЫ // Современные наукоемкие технологии. 2016. № 9-1. С. 9-12;URL: https://top-technologies.ru/en/article/view?id=36168 (дата обращения: 08.07.2026).