


Scientific journal
Modern high technologies
ISSN 1812-7320
"Перечень" ВАК
ИФ РИНЦ = 1,279
THE AUTOMATION TROUBLESHOOTING WHEN OPERATING CONTROLS, COMMUNICATION AND NAVIGATION

В процессе эксплуатации средств управления, связи и навигации, к которым, в частности, относятся радиотехнические средства (РТС), использующиеся для обеспечения полётов авиации, возможны случаи возникновения отказов в их работе, что сказывается на безопасности полётов и перелётов воздушных судов. В связи с этим одной из труднорешаемых задач, требующих высокой квалификации специалистов, является поиск и устранение неисправностей (ПУН), имеющие целью скорейшее восстановление отказавшего РТС и приведение его в исправное состояние.
Постановка задачи
Перед любым применением РТС по назначению производится его включение, оценка работоспособности и при необходимости настройка. Как правило, оценка работоспособности осуществляется по встроенным контрольно-измерительным приборам (КИП), путем контроля определенных технических параметров. При нахождении контролируемых параметров в пределах, установленных технической документацией, делается вывод о том, что данное техническое средство находится в работоспособном состоянии и готово к использованию по назначению. При уходе отдельных параметров за допустимые пределы обслуживающий персонал осуществляет настройку аппаратуры и доводит данные параметры до значений, определенных технической документацией.
При невозможности добиться заданных выходных параметров, определенных технической документацией, делается вывод о выходе из строя РТС, т. е. об её неисправности (отказе) [2]. Отказ техники может произойти также и в процессе ее применения по назначению. Изменение интенсивности отказов можно разделить на три периода (рис. 1) [3, 8]: период приработки (от начала эксплуатации t0 до момента t1); период нормальной работы (от момента t1 до момента t2); период старения (от момента t2 до выхода из строя всех элементов партии).
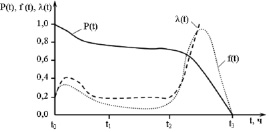
Рис. 1. Изменение основных показателей надежности элементов: интенсивность отказов (λ(t)); плотность распределения времени отказов (f(t)); вероятность безотказной работы (p(t))
Анализ рис. 1 показывает, что наибольшая интенсивность отказов будет проявляется в период приработки и старения изделия, что необходимо особенно учитывать при их эксплуатации. Мероприятиями технического обслуживания предупредить внезапные отказы РТС практически невозможно. Следовательно, в процессе эксплуатации РТС могут возникать ситуации, когда аппаратура будет выходить из строя и для ее восстановления необходимо проводить ремонт. В связи с этим обслуживающий персонал должен выполнять работы по ремонту отказавшего РТС и приведению его в работоспособное (исправное) состояние.
Оценка работоспособности осуществляется путем контроля основных параметров, отклонение которых от норм, определенных технической документацией, определяется как неисправное состояние объекта. В связи с этим прежде, чем приступить к поиску неисправностей аппаратуры, согласно предлагаемой методике необходимо осуществить ее настройку и регулировку, которая осуществляется в соответствии с инструкцией по эксплуатации. По результатам контроля параметров настроенной аппаратуры можно, имея определенный опыт в вопросах эксплуатации техники, сделать вывод о неисправности, каких-либо функциональных узлов, каналов или каскадов.
После первоначального определения неисправных функциональных узлов, каналов или каскадов приступают ко второму этапу поиска неисправностей непосредственно в них.
Восстановление работоспособности РТС складывается из отыскания неисправностей и анализа их причин, устранения неисправностей и проверки работоспособности аппаратуры после этого. Следовательно, необходимо научить специалистов, обслуживающих РТС, грамотно эксплуатировать РТС, искать и устранять неисправности.
Для получения навыков в вопросах поиска неисправностей, специалисты, эксплуатирующие РТС, должны знать принцип работы эксплуатируемой техники по структурным, функциональным и принципиальным схемам, физические процессы, происходящие в аппаратуре; назначение органов настройки и регулировки, физические процессы, происходящие в аппаратуре при воздействии на них; порядок настройки и регулировки аппаратуры; методы и способы поиска неисправностей. Кроме этого, уметь пользоваться контрольно-измерительной аппаратурой (КИА); оценивать работоспособность изделия по встроенным КИП; оценивать исправность функциональных узлов, каскадов или каналов по встроенным КИП; оценивать работоспособность (исправность) составных элементов устройства, осуществлять поиск неисправностей и их устранение.
В настоящее время обслуживающий персонал в процессе ПУН применяет различные существующие методы и способы, причем последовательность их применения произвольная, зависящая от индивидуальных способностей конкретного человека. При этом, как показывает анализ ввода в строй техники, среднее время восстановления работоспособности Tср.вост. при различных отказах техники радиотехнического обеспечения (РТО) полётов авиации очень большое:
 , (1)
, (1)
где τi – время, затрачиваемое на восстановление аппаратуры при i-м отказе; m – общее число восстановлений.
Причиной нарушения работоспособности РТС является переход в неработоспособное состояние одного или нескольких его элементов или нарушение заданных связей между элементами. Информация, необходимая для определения технического состояния РТС и его элементов, получается путем проведения определенной последовательности проверок (тестов) [9], представляющих собой совокупность операций, по результатам которых можно судить о состоянии, по крайней мере, одного элемента.
Из возможных сочетаний элементарных диагностических проверок наибольший интерес представляют следующие методы поиска [7]:
1. Метод последовательных поэлементных проверок, заключающийся в проверке элементов последовательно по одному с анализом состояния объекта диагностирования (ОД) после каждой проверки.
2. Метод последовательных групповых проверок, заключающийся в проверке групп элементов с анализом состояния ОД после каждой проверки.
3. Комбинационный метод, заключающийся в проверке групп элементов с анализом состояния рассматриваемого средства после проведения полной группы проверок, обеспечивающей однозначное определение неисправного элемента.
При реализации перечисленных методов технического диагностирования (ТД) применяются следующие способы поиска неисправностей: внешнего осмотра; замены; исключения; сравнения; контрольных переключений и проверок; промежуточных измерений; характерного признака [4, 7]. В то же время стоящие перед авиацией задачи требуют постоянной готовности РТС к применению по назначению.
В связи с этим возникает задача сокращения времени ПУН в аппаратуре. Эта задача может решаться по нескольким направлениям: более качественной подготовкой специалиста с достаточным опытом эксплуатации техники, а также опытом по ПУН (как правило, на должности начальников станций (аппаратных) назначаются выпускники вузов, не имеющие достаточных практических навыков работы на данных средствах); разработкой единой методики ПУН (отказов) конкретных образцов техники; использованием автоматизированного способа поиска неисправностей.
Единая методика поиска неисправностей
За период обучения в вузе, качественно, с богатым опытом ПУН и эксплуатации техники подготовить выпускника довольно-таки сложно, учитывая жесткие временные рамки, отводимые на изучение специальных дисциплин, и т.д.
Разработка единой методики поиска неисправностей поможет специалисту, не обладающему достаточным опытом эксплуатации и поиска неисправностей, осуществлять приведение РТС в рабочее состояние.
В настоящее время для обеспечения полётов используются средства связи и РТО, разнотипные по конструктивному исполнению, в то же время в них используются общие по принципу действия функциональные узлы. Причем отдельные функциональные узлы различных средств РТО могут иметь отличия, а в составе отдельных средств РТО могут вообще отсутствовать. В таблице представлены основные средства РТО, используемые в частях связи и РТО авиации ВС РФ, и их функциональные узлы.
Следовательно, любое средство связи и РТО можно представить в виде следующей структурной схемы (рис. 2). Учитывая одинаковое функциональное построение средств РТО можно разработать единую методику ПУН (отказов).
Наличие функциональных узлов в основных средствах РТО
|
Средства РТО |
Функциональные узлы |
|||||||
|
Передающ. устройство |
Приёмное устройство |
Аппаратура обработки инф-ции |
Аппаратура отображ.инф-ции |
Аппаратура контроля работоспособн. |
Аппаратура автоматики |
Антенная система |
Система энерго-снабжения |
|
|
РСП |
+ |
+ |
+ |
+ |
+ |
+ |
+ |
+ |
|
РСБН |
+ |
+ |
+ |
+ |
+ |
+ |
+ |
+ |
|
ПРМГ |
+ |
+ |
+ |
+ |
+ |
+ |
+ |
|
|
ПАР |
+ |
+ |
+ |
+ |
+ |
|||
|
АРП |
+ |
+ |
+ |
+ |
+ |
+ |
+ |
+ |
|
РЛС |
+ |
+ |
+ |
+ |
+ |
+ |
+ |
+ |
|
МРМ |
+ |
+ |
+ |
+ |
+ |
|||
Таким образом, первоначальная задача поиска неисправностей сводится к определению неисправного функционального узла. Для этих целей можно использовать схемы оценки работоспособности средств РТО. При этом необходимо учитывать, что определение неисправного функционального узла еще не говорит о том, что неисправность находится именно в этом функциональном узле, так как возможны зависимые неисправности.

Рис. 2. Обобщённая структура наземного РТС
Дальнейший поиск неисправности осуществляется в конкретном функциональном узле в последовательности, приведенной в заранее отработанных алгоритмах, путем измерения параметров сигналов в контрольных точках и сравнением их с характеристиками, приведенными в алгоритме. Для измерения параметров используется контрольно-измерительная аппаратура. Следуя последовательности, приведенной в заранее отработанных алгоритмах поиска неисправностей для конкретного образца техники РТО, определяется отказавший каскад (элемент). Использование заранее отработанных алгоритмов для конкретного образца техники РТО, позволит производить поиск неисправностей по единой методике, что позволит оперативно устранять неисправности в аппаратуре специалистами, не имеющими достаточного опыта ПУН.
Предложенная методика не требует существенных затрат, проста в применении, не требует глубоких теоретических и практических знаний по эксплуатируемой технике. В то же время данная методика требует большого опыта работы с контрольно-измерительной аппаратурой, а также умения производить измерения параметров на конкретном образце техники РТО.
Алгоритм работы системы поиска и устранения неисправностей
Обобщенный алгоритм работы системы поиска и устранения неисправностей для РТС, с учетом заранее разработанных алгоритмов для конкретного образца техники РТО, представлен на рис. 3.
Автоматизированный способ поиска неисправностей может иметь два направления:
– использование макета с заранее установленными требуемыми параметрами сигналов в контрольных точках и сравнения их с параметрами аппаратуры, в которой осуществляется поиск неисправности. Результаты сравнения отображаются в системе отображения информации с указанием неисправного каскада (элемента);
– моделирование требуемого РТС на компьютере с выделением контрольных точек и параметров сигналов в них и дальнейшего сравнения их с сигналами, снимаемыми с данных контрольных точек проверяемого РТС. Процесс контроля параметров может осуществляться автоматически с заданным временным интервалом. При отклонении параметров сигналов контролируемого РТС от сигналов моделируемого устройства может выдаваться звуковой сигнал и отображаться контрольная точка, где сигнал отличается от эталонного сигнала.
Безусловно, во всех случаях необходимо смоделировать оптимальный вариант проверяемого РТС, а также провести предварительный анализ сигналов с указанием конкретных точек в схеме аппаратуры, контроль которых позволит осуществить поиск отказавшего элемента. Использование базы знаний с характеристиками сигналов с возможностью логического вывода позволит оперативно рекомендовать действие оператору.
Эволюция информационных технологий и систем всё в большей степени определяется их интеллектуализацией. Интеллектуальные информационные технологии – это одна из наиболее перспективных и быстро развивающихся научных и прикладных областей информатики. Она оказывает существенное влияние на все научные и технологические направления, связанные с использованием компьютеров, и уже сегодня даёт обществу то, что оно ждёт от науки, – практически значимые результаты, многие из которых способствуют кардинальным изменениям в сфере их применения [1]. В настоящее время применяются семь классов моделей знаний: логические, продукционные, фреймовые, сетевые, объектно ориентированные, специальные и комплексные.
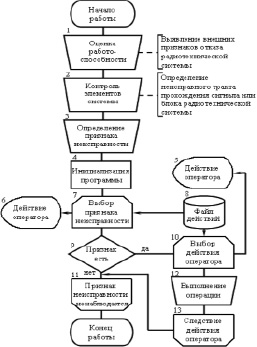
Рис. 3. Алгоритм работы системы ПУН
Анализ представленных моделей знаний показал, что применительно к работе по ПУН в РТС необходимо использовать продукционную модель представления знаний, что позволяет использовать различные правила вывода modus ponens (правило отделения, или модус поненс), modus tollens (отрицательное суждение, или модус толленс), modus ponendo tollens (положительно-отрицательное суждение) modus tollendo ponens (отрицательно-положительное суждение). Центральным звеном продукционной модели является множество продукций или правил вывода. Каждая такая продукция в общем виде может быть представлена выражением
 , (2)
, (2)
где Wi – сфера применения i-й продукции, определяющая класс ситуаций в некоторой предметной области (ПрО), в которых применение данной продукции правомерно; Ui – предусловие i-й продукции, содержащее информацию об истинности данной продукции, ее значимости относительно прочих продукций и т.п.; Pi – условие i-й продукции, определяемое факторами, непосредственно не входящими в Ai, истинностное значение которого разрешает применять данную продукцию; Ai > Bi – ядро i-й продукции, соответствующее правилу «если..., то...»; Ci – постусловие i-й продукции, определяющее изменения, которые необходимо внести в систему продукций после выполнения данной продукции [1, 5, 10].
В данной работе использовано правило вывода modus ponens (правило отделения, или модус поненс) – это обоснованное правило, относящееся к исчислению предикатов. Если дано выражение вида P > Q и другое выражение вида P и оба выражения истинны на интерпретации I, то modus ponens позволяет нам делать вывод, что Q тоже истинно на этой интерпретации [6]. Представленная модель представления знаний реализована в системе ПУН (рис. 3). В начале оценивается работоспособность по внешним признакам, характеризующим исправность РТС. В случае выявления признаков неисправности запускается программа ПУН. Выбирается признак неисправности. Система на основании введённой информации рекомендует действие оператору посредством логического вывода. После выполнения операции оператор оценивает наличие признака неисправности и исправность РТС. В случае исправности РТС работа заканчивается, иначе оператор выполняет очередное действие, рекомендованное системой ПУН, до приведения РТС в исправное состояние.
Заключение
Таким образом, применение данной методики ПУН в РТС позволит снизить время поиска неисправности и восстановление работоспособного (исправного) состояния, независимо от квалификации специалиста за счёт выдачи ему рекомендаций по дальнейшему действию, что позволит постоянно поддерживать высокую степень готовности к использованию средств управления, связи и навигации по назначению.
Библиографическая ссылка
Машков В.Г., Стражник В.П. АВТОМАТИЗАЦИЯ ПОИСКА НЕИСПРАВНОСТЕЙ ПРИ ЭКСПЛУАТАЦИИ СРЕДСТВ УПРАВЛЕНИЯ, СВЯЗИ И НАВИГАЦИИ // Современные наукоемкие технологии. 2016. № 7-1. С. 48-53;URL: https://top-technologies.ru/en/article/view?id=36060 (дата обращения: 03.07.2026).