


Scientific journal
Modern high technologies
ISSN 1812-7320
"Перечень" ВАК
ИФ РИНЦ = 1,279
HARDWARE OF AUTOMATION OF CONTROL OF THE STATE AND PROVISION OF VEHICLES OF THE SPECIAL PURPOSE

Спутниковый мониторинг транспорта – система мониторинга подвижных объектов, построенная на основе систем спутниковой навигации GPS или ГЛОНАСС, оборудования и технологий сотовой и/или радиосвязи, вычислительной техники и цифровых карт. Спутниковый мониторинг транспорта используется для решения задач транспортной логистики в системах управления перевозками и автоматизированных системах управления автопарком [5].
При этом различают два варианта мониторинга: online – с непрерывной дистанционной передачей координатной информации и offline – информация считывается периодически по прибытии на диспетчерский пункт.
Системы спутникового мониторинга транспорта решают следующие задачи [5]:
– мониторинг включает определение координат местоположения транспортного средства, его направления, скорости движения и других параметров: расход топлива, температура в рефрижераторе и др. Системы спутникового мониторинга транспорта помогают водителю в навигации при передвижении в незнакомых районах;
– контроль соблюдения графика движения – учёт передвижения транспортных средств, автоматический учёт доставки грузов в заданные точки и др.;
– сбор статистки и оптимизация маршрутов – анализ пройденных маршрутов, скоростного режима, расхода топлива и др. транспортных средств с целью определения лучших маршрутов;
– обеспечение безопасности – возможность определения местоположения помогает обнаружить угнанный автомобиль. В случае аварии система спутникового мониторинга помогает передать сигнал о бедствии в службы спасения. Также на основе спутникового мониторинга транспорта действуют некоторые системы автосигнализаций.
Система спутникового мониторинга транспорта включает следующие компоненты:
– транспортное средство, оборудованное GPS или ГЛОНАСС контроллером или трекером, который получает данные от спутников и передаёт их на серверный центр мониторинга посредством GSM, CDMA или реже спутниковой и УКВ-связи. Последние два актуальны для мониторинга в местах, где отсутствует полноценное GSM-покрытие, таких как Сибирь или Дальний Восток [6];
– серверный центр с программным обеспечением для приёма, хранения, обработки и анализа данных;
– компьютер диспетчера, ведущего мониторинг автомобилей [4, 5].
Использование систем спутникового мониторинга повышает качество и эффективность работы корпоративного транспорта, и в среднем на 20–25 % снижает расходы на топливо и содержание автопарка.
Существующие способы сопровождения и управления наземными транспортными средствами [1–3] и их технические решения [7, 8], установленные на борту контролируемых мобильных объектов для определения состояния и контроля работы основных узлов и агрегатов транспортных средств, принимают сигналы глобальной спутниковой системы радионавигации.
Сигналы преобразуются в сообщения, в поля служебной информации которых записывают коды идентификационных признаков, текущих навигационных параметров и состояний узлов и агрегатов транспортных средств.
Сообщения переносятся на высокочастотные несущие и передаются в виде сигналов по радиоэфиру в диспетчерский центр. Для этого используется бортовой терминал стандартной сотовой сети подвижной связи и/или бортовой терминал специализированной ретрансляционно-радиопеленгационной сети.
Принятые и обработанные в диспетчерском центре сигналы преобразуются в координаты, что позволяет провести построение траектории движения транспортного средства. При этом траектории отображаются на фоне фрагментов электронной карты-схемы местности в сопровождении текстовой информации.
Далее формируются командные сообщения с кодами соответствующих команд, которые передаются по стандартной сотовой сети подвижной связи и/или по специализированной ретрансляционно-радиопеленгационной сети (СРНС) к транспортному средству.
В качестве системы мониторинга можно отметить и телематическую систему мониторинга транспортных средств, описанную в [2, 3]. В её состав входят микроконтроллер с навигационным приемником и терминалом беспроводной связи, блок интерфейсов передачи данных, блок энергонезависимой памяти, датчики контроля параметров специального оборудования транспортного средства, а также блок электропитания.
Навигационный приемник является либо приемником глобальной навигационной спутниковой системы GPS, либо совмещенным ГЛОНАСС/GPS приемником. Блоки интерфейсов включают интерфейсы передачи данных от датчиков на внешние устройства, в том числе на бортовой компьютер специального транспортного средства.
Недостатком этой системы является отсутствие технических средств, позволяющих точно определять координаты автотранспортного средства в зонах слабого приема сигнала навигационных спутников.
В качестве общего недостатка систем [1–7] следует отметить невозможность определения точных координат транспортных средств при слабом сигнале ГЛОНАСС/GPS спутников или при его отсутствии на аэродромах из-за высокого уровня электромагнитных помех со стороны средств радиотехнического обеспечения полетов, что ограничивает область применения этих способов для транспортных средств специального назначения, применяемых для наземного обеспечения полетов авиации.
Для устранения отмеченных выше недостатков предлагается техническое решение, которое может быть использовано в составе автоматизированной системы управления аэродромно-техническим обеспечением полетов авиации в качестве абонентского оборудования, устанавливаемого на подвижные средства наземного обеспечения полетов (СНОП) авиации.
Бортовой комплект мониторинга (БКМ) устанавливается на каждое СНОП. Работает он по принципу передачи информации от БКМ по радиоканалу на автоматизированное рабочее место (АРМ) дежурному по аэродромно-техническому обслуживанию (АТО). Телематическая система получает информацию о местоположении, параметрах движения СНОП, его состоянии (исправности шасси и специального оборудования) в режиме реального времени online.
Информация принимается по радиоканалу на АРМе дежурного по АТО и исполняется командами системы управления объекта. Кроме этого, появляется возможность установить голосовое соединение каждого водителя СНОП с дежурным по АТО.
Введение модуля бесплатформенной инерциальной навигационной системы (БИНС) обеспечит возможность надежного определения координат местоположения специального транспортного средства на аэродроме (СНОП) в случае отсутствия или слабого сигнала ГЛОНАСС/GPS спутников.
Введение в состав БКМ коммуникатора позволит каждому водителю СНОП на экране коммуникатора визуально оценивать режим работы СНОП, обмениваться текстовыми сообщениями с АРМ дежурного по АТО и получать графическое изображение маршрута безопасного движения по аэродрому.
Отображение информации о местоположении и техническом состоянии СНОП в режиме online на экране АРМ на электронной карте аэродрома позволит дежурному по АТО формировать и передавать на коммуникатор безопасную траекторию маршрута движения каждого СНОП, который формируется на АРМ дежурного по АТО.
Введение блока идентификации водителя обеспечит учет времени его работы и позволит не допускать к эксплуатации транспортных средств посторонних лиц.
УКВ-радиостанция с громкоговорящей связью позволит установить голосовую связь водителя с дежурным по АТО и передавать телематические данные на АРМ дежурного по АТО.
Бортовой комплект мониторинга представлен на рисунке и состоит из бортового контроллера I и коммуникатора водителя II.
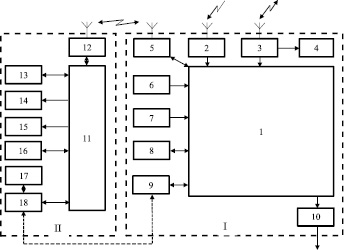
Бортовой комплект мониторинга
Бортовой контроллер I включает в себя: 1 – микрокомпьютер, 2 – двухсистемный навигационный приемник ГЛОНАСС/GPS, 3 – УКВ-радиостанцию, 4 – комплект громкоговорящей связи (ГГС) для УКВ-радиостанции, 5 – устройство беспроводной связи с коммуникатором водителя, 6 – модуль бесплатформенной инерциальной навигационной системы (БИНС), 7 – модуль идентификации водителя, 8 – USB-порт, 9 – беспроводное зарядное устройство для коммуникатора водителя, 10 – блок дискретных выходов.
В состав коммуникатора II входят: 11 – микроконтроллер коммуникатора водителя, 12 – устройство беспроводной связи с бортовым контроллером, 13 – дисплей с сенсорным экраном, 14 – звукоизлучатель, 15 – вибромотор, 16 – блок энергонезависимой памяти, 17 – аккумуляторная батарея, 18 – контроллер питания коммуникатора с беспроводным зарядным устройством.
Микрокомпьютер 1 связывает все компоненты бортового контроллера воедино и обеспечивает их взаимодействие согласно заложенной в него программе. Благодаря этой программе центральный процессор обеспечивает прием данных, поступающих от различных блоков системы, их логическую и математическую обработку и, как результат, принятие решений, на основании которых вырабатываются управляющие команды для блоков контроллера в зависимости от конкретной ситуации.
Двухсистемный навигационный приемник сигналов спутниковых радионавигационных систем ГЛОНАСС/GPS обеспечивает определение координат в дифференциальном режиме с высокой точностью (до 1 см). В случае невозможности определения координат по сигналам систем ГЛОНАСС/GPS, данная процедура осуществляется с помощью блока бесплатформенной инерциальной навигационной системы 6.
Устройство беспроводной связи 5 предназначено для двухсторонней радиосвязи с коммуникатором водителя II на расстоянии до 200 м от транспортного средства и передачи задач от дежурного по АТО водителю и приема подтверждения получения задачи водителем. УКВ-радиостанция 3 с блоком ГГС 4 предназначена для голосовой связи водителя, находящегося в кабине транспортного средства с дежурным по АТО, и передачи телематических данных на АРМ дежурного АТО.
USB-порт 8 предназначен для сервисного обслуживания бортового контроллера, обновления программного обеспечения управляющего микрокомпьютера 1. Контроллер питания коммуникатора водителя 18 предназначен для питания коммуникатора стабилизированным напряжением и зарядки его аккумуляторной батареи 16. Основной вход питания позволяет работать в бортовой сети с напряжением питания от 10 до 30 вольт, что делает возможным использование бортового блока совместно с подавляющим большинством базовых шасси без применения каких-либо дополнительных согласующих цепей. Кроме того, контроллер питания обеспечивает защиту бортового блока от переполюсовки, перенапряжения, помех и т.д. Модуль идентификации водителя 18 предназначен для идентификации водителей с помощью электронного ключа I-Button или беспроводной RFID-метки в целях учета их времени работы и недопущения посторонних лиц к эксплуатации. Микроконтроллер коммуникатора водителя 11 связывает все компоненты коммуникатора водителя воедино и обеспечивающее их взаимодействие согласно заложенной в него программе. В качестве процессора выступает быстродействующая однокристальная микро-ЭВМ, обеспечивающая скорость и точность вычислений, достаточную для решения различных задач. Устройство беспроводной связи с бортовым контроллером I предназначено для двухстороннего обмена информацией радиосвязи с бортовым контроллером, приема задач водителем от дежурного по АТО и передачи подтверждения получения задачи водителем. Дисплей с сенсорным экраном 13 служит для визуального отображения текстовых сообщений от дежурного по АТО, а также отображения на электронной карте безопасного маршрута движения, который формируется на АРМ дежурного по АТО и сначала передается через УКВ-канал в бортовой контроллер, а из него через устройство беспроводной связи в коммуникатор. Сенсорный экран служит для навигации по пунктам меню и отправки подтверждения о получении задачи, а также ее выполнении. Пьезокерамический звукоизлучатель 14 предназначен для звуковой сигнализации водителю о поступлении сообщений от дежурного по АТО на выполнение задач. Вибромотор 15 предназначен для сигнализации водителю о поступлении сообщений от дежурного по АТО на выполнение задач в условиях сильного шума при работе авиационных двигателей, когда коммуникатор находится в кармане водителя и звуковой сигнализатор 14 может быть не услышан. Блок энергонезависимой памяти 16 предназначен для хранения накопленных данных, АКБ 17 предназначена для питания коммуникатора. Контроллер питания коммуникатора 18 предназначен для контроля режимов работы АКБ, ведения статистики ее эксплуатации с целью своевременной замены при недопустимом уменьшении ее емкости или выходе из строя.
Выводы
Предложенный бортовой комплект мониторинга для транспортных средств специального назначения существенно расширяет функциональные возможности существующих систем мониторинга автотранспорта и обеспечивает не только наблюдение, но и управление объектом за счёт включения дополнительных элементов в существующую схему:
– модуля бесплатформенной инерциальной навигационной системы (БИНС);
– коммуникатора водителя, оснащённого устройством беспроводной связи с бортовым контроллером;
– блока идентификации водителя посредством электронного ключа I-Button или RFID-метки и коммуникатора водителя;
– контроллера питания коммуникатора с беспроводным зарядным устройством от бортового контроллера.
Библиографическая ссылка
Кудаев А.Н., Косенко А.А., Бобров Д.В., Бобров В.Н. АППАРАТНОЕ ОБЕСПЕЧЕНИЕ АВТОМАТИЗАЦИИ КОНТРОЛЯ СОСТОЯНИЯ И ПОЛОЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ СПЕЦИАЛЬНОГО НАЗНАЧЕНИЯ // Современные наукоемкие технологии. 2015. № 12-5. С. 801-805;URL: https://top-technologies.ru/en/article/view?id=35374 (дата обращения: 22.06.2026).