


Scientific journal
Modern high technologies
ISSN 1812-7320
"Перечень" ВАК
ИФ РИНЦ = 1,279
THE BUILT-IN CONTROLLER OF ELECTRIC MOTOR’S ELECTROMECHANICAL TIME CONSTANT AND BACKLASH OF ELECTRIC DRIVE MECHANICAL TRANSMISSION BY THE TIME OF REACTION EXTREMUM

Известны аналоги устройств и способы встроенного контроля электромеханической постоянной времени (ЭМПВ) электродвигателей (ЭД) постоянного тока и мертвых ходов (МХ) механических передач (МП) электроприводов (ЭП) постоянного тока в ходе их эксплуатации без демонтажа МП и ЭД постоянного тока с изделий, где они выполняют свои рабочие функции [8-10, 22].
На современном этапе развития микроконтроллерной схемотехники существует ряд известных методик синтеза устройств рассматриваемого класса [1-6, 11-17] на основе современных микроконтроллеров (МК).
Известен прототип [16] – микроконтроллерное устройство встроенного контроля ЭМПВ ЭД и МХ МП ЭП постоянного тока, содержащее: ЭД постоянного тока, который через контролируемую МП подсоединен к нагрузке; датчик контроля (ДК) [8, 11, 22], включенный последовательно в обмотку ЭД постоянного тока – стандартный токовый шунт на 75 мВ, который исключает влияние ДК на режим работы ЭД; формирователя импульсов (ФИ) [9], вход которого подключен к ДК; пассивное апериодическое звено (ПАЗ) первого порядка [10], вход которого тоже подключен к ДК; узел выявления экстремума напряжения (УВЭН) [10], вход которого подключен к выходу ПАЗ; МК – ATmega48, работой которого управляют ФИ и УВЭН; четырехразрядный семисегментный знаковый индикатор (СЗИ) – АЛС329Б, который подключен к МК и высвечивает численное значение измеренного МХ  МП ЭП, которое рассчитывается МК из выражения [16]
МП ЭП, которое рассчитывается МК из выражения [16]
 (1)
(1)
где  – номинальная скорость вращения ЭД постоянного [об/мин] (численные значения
– номинальная скорость вращения ЭД постоянного [об/мин] (численные значения  берется из паспорта на ЭД и записывается в энергонезависимую EEPROM-память данных МК),
берется из паспорта на ЭД и записывается в энергонезависимую EEPROM-память данных МК),  – время выбора МХ МП [с] и TЭД – ЭМПВ ЭД постоянного тока [с] измеряется прототипом [16] в процессе работы и записывается в EEPROM-память МК.
– время выбора МХ МП [с] и TЭД – ЭМПВ ЭД постоянного тока [с] измеряется прототипом [16] в процессе работы и записывается в EEPROM-память МК.
В прототипе [16] вычислить непосредственно ЭМПВ TЭД ЭД постоянного тока не представляется возможным, поэтому в устройстве вычисляется время достижения экстремума напряжения TЭ на выходе ПАЗ первого порядка [16]
 , (2)
, (2)
где TЭД – ЭМПВ ЭД постоянного тока (измеряемая устройством), TАЗ – постоянная времени ПАЗ (величина известная), k – кратность пускового тока (напряжения) ЭД постоянного тока (берется из технической документации на ЭД – величина постоянная для каждого конкретного ЭД постоянного тока).
Выражение (2) неразрешимо относительно TЭД в аналитическом виде, оно является трансцендентным уравнением относительно TЭД и в [16] решается с заданной точностью численным методом, а затем подставляется в (1) для численного расчета МХ  МП ЭП постоянного тока.
МП ЭП постоянного тока.
Аналоги [8, 22] и прототип [16], наряду с достаточно алгоритмичным обеспечением процесса измерения величины МХ a МП ЭП постоянного тока по выражению (1) с использованием трансцендентного уравнения (2), обладают и существенными недостатками, уменьшающими функциональные [7, 21] и эргономические возможности [18, 19]:
– невозможно использовать прототип [16] для измерения МХ и ЭМПВ МП ЭП переменного тока, хотя электроприводы переменного тока находят широкое применение в народном хозяйстве и специальной технике;
– в прототипе [16] выводится на индикацию только численное значение МХ МП постоянного тока, а численное значение ЭМПВ ЭД постоянного тока не индицируется, хотя этот параметр входит в передаточную функцию ЭП и является определяющим в точности, быстродействии и устойчивости работы ЭП.
Постановка задачи
Предлагаемое микроконтроллерное устройство встроенного контроля ЭМПВ ЭД и МХ МП ЭП постоянного и переменного тока [20] должно решать две задачи:
1. Обеспечение возможности оперативного встроенного контроля ЭМПВ TЭД ЭД и МХ a МП ЭП, как постоянного, так и перемененного тока.
2. Вывод на СЗИ устройства численных значений ЭМПВ TЭД ЭД и МХ a МП ЭП, как постоянного, так и перемененного тока.
Блок-схема устройства
В отличие от аналогов [8-10, 22] и прототипа [16] предлагаемое микроконтроллерное устройство [20] дополнительно должно включать в свою структуру пиковый амплитудный детектор (ПАД) [9], который является инерционным по несущей частоте питающего напряжения ЭД переменного тока и безынерционным по огибающей выходного сигнала ДК ЭД переменного тока.
Блок-схема встроенного контроля ЭМПВ ЭД и МХ МП ЭП постоянного или переменного тока [20] по времени экстремума реакции ПАЗ представлена на рис. 1.
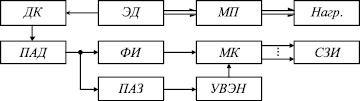
Рис. 1. Блок-схема встроенного контролера электромеханической постоянной времени электродвигателя и мертвого хода механической передачи электропривода постоянного и переменного тока по времени экстремума реакции: ДК – датчик контроля; ЭД – электродвигатель постоянного или переменного тока; МП – механическая передача; Нагр. – нагрузка ЭП; ПАД – пиковый амплитудный детектор; ФИ – формирователь импульсов; МК – микроконтроллер ATmega8515; СЗИ – девятиразрядный семисегментный знаковый индикатор АЛС356А; ПАЗ – пассивное апериодическое звено первого порядка; УВЭН – узел выявления экстремума напряжения на выходе ПАЗ
Поставленная задача достигается тем, что во встроенный контролер ЭМПВ ЭД и МХ МП ЭП постоянного и переменного тока по времени экстремума реакции ПАЗ [20], содержащий: ЭД постоянного или переменного тока, соединенный с нагрузкой (на рис. 1 – Нагр.) через контролируемую МП; ДК [8, 22], встроенный в ЭД; ФИ [9]; ПАЗ [10] первого порядка; УВЭН [10], вход которого подключен к выходу ПАЗ первого порядка, введены: ПАД [9], вход которого подключен к датчику ДК, а выход соединен со входами ФИ и ПАЗ первого порядка; восьмибитный МК ATmega8515 с FLASH-памятью программ, EEPROM- и SRAM-памятью данных; девятиразрядный СЗИ АЛС356А; первая линия порта МК, настроенная как вход, подключена к выходу ФИ, вторая линия порта МК, настроенная как вход, подключена к выходу УВЭН, а семнадцать линий портов МК, настроенные как выход, подключены к девятиразрядному СЗИ АЛС356А.
Этапы работы устройства
1. Ввод в эксплуатацию (см. рис. 1). На первом этапе происходит инициализация и программирование МК – ATmega8515: в FLASH-память программ записывается программа работы МК; в энергонезависимую EEPROM-память данных – паспортная (из технической документации) номинальная скорость вращения  [об/мин] и k – кратность пускового тока (напряжения) ЭД постоянного и переменного тока, известная постоянная времени ПАЗ TАЗ первого порядка; в SRAM-памяти данных выделяются регистры оперативной памяти для обеспечения программы работы МК.
[об/мин] и k – кратность пускового тока (напряжения) ЭД постоянного и переменного тока, известная постоянная времени ПАЗ TАЗ первого порядка; в SRAM-памяти данных выделяются регистры оперативной памяти для обеспечения программы работы МК.
2. Рабочий режим (см. рис. 1). В большинстве случаев включение ЭП для выполнения рабочих функций не сопровождается измерением МХ  МП и ЭМПВ TЭД ЭД постоянного и переменного тока, так как их величины
МП и ЭМПВ TЭД ЭД постоянного и переменного тока, так как их величины  и TЭД меняется медленно по мере износа элементов ЭП в процессе эксплуатации. Следует учитывать что, изменения a и TЭД могут оказаться существенными при изменении климатических условий, что необходимо учитывать в процессе эксплуатации устройства.
и TЭД меняется медленно по мере износа элементов ЭП в процессе эксплуатации. Следует учитывать что, изменения a и TЭД могут оказаться существенными при изменении климатических условий, что необходимо учитывать в процессе эксплуатации устройства.
3. Режим измерения (см. рис. 1). Временные диаграммы работы встроенного контролера ЭМПВ TЭД ЭД и МХ a МП ЭД постоянного и переменного тока по времени экстремума реакции ПАЗ [20] в режиме измерения представлены на рис. 2. Перед включением устройства в режиме измерения МХ a МП ЭП устанавливается в максимальное положение (как и в аналогах и прототипе) и затем подается питание на устройство.
В момент времени  (рис. 2) в контроллере происходят следующие физические процессы: запускается в работу ЭД постоянного или переменного тока; в обмотке якоря ЭД постоянного тока возникает импульс пускового тока, который создает импульс постоянного напряжения на ДК с амплитудой
(рис. 2) в контроллере происходят следующие физические процессы: запускается в работу ЭД постоянного или переменного тока; в обмотке якоря ЭД постоянного тока возникает импульс пускового тока, который создает импульс постоянного напряжения на ДК с амплитудой  (рис. 2,а); в обмотке статора ЭД переменного тока возникает импульс пускового тока, который создает импульс переменного напряжения на ДК с амплитудой
(рис. 2,а); в обмотке статора ЭД переменного тока возникает импульс пускового тока, который создает импульс переменного напряжения на ДК с амплитудой  (рис. 2,б); сигнал с ДК, как для ЭД постоянного тока (рис. 2,а), так и для ЭД переменного тока (рис. 2,б) поступает на ПАД (рис. 2,в); на выходе ПАД создается выходной сигнал одной и той же формы, как для ЭД постоянного, так и для ЭД переменного тока
(рис. 2,б); сигнал с ДК, как для ЭД постоянного тока (рис. 2,а), так и для ЭД переменного тока (рис. 2,б) поступает на ПАД (рис. 2,в); на выходе ПАД создается выходной сигнал одной и той же формы, как для ЭД постоянного, так и для ЭД переменного тока  (рис. 2,в); выходной сигнал ПАД
(рис. 2,в); выходной сигнал ПАД  (рис. 2,в) подается на входы ФИ и ПАЗ первого порядка; ФИ на выходе вырабатывает первый короткий импульс
(рис. 2,в) подается на входы ФИ и ПАЗ первого порядка; ФИ на выходе вырабатывает первый короткий импульс  (рис. 2,г), поступающий на МК; выходной сигнал ПАЗ первого порядка в рассматриваемый момент времени отсутствует
(рис. 2,г), поступающий на МК; выходной сигнал ПАЗ первого порядка в рассматриваемый момент времени отсутствует  (рис. 2,д); МК готовится к началу отсчета, во-первых, времени выбора МХ
(рис. 2,д); МК готовится к началу отсчета, во-первых, времени выбора МХ  МП (рис. 2,е) и, во-вторых, времени достижения экстремума напряжения
МП (рис. 2,е) и, во-вторых, времени достижения экстремума напряжения  на выходе ПАЗ первого порядка (рис. 2,е), которые будут записываться в SRAM-память данных МК.
на выходе ПАЗ первого порядка (рис. 2,е), которые будут записываться в SRAM-память данных МК.
В интервале времени  (рис. 2) в контроллере протекают следующие физические процессы: ЭД постоянного или переменного тока приходит во вращение; пусковой ток обмотки якоря или статора ЭД и напряжение на выходе ПАД
(рис. 2) в контроллере протекают следующие физические процессы: ЭД постоянного или переменного тока приходит во вращение; пусковой ток обмотки якоря или статора ЭД и напряжение на выходе ПАД  (рис. 2,в) уменьшаются по экспоненте с постоянной времени, равной ЭМПВ TЭД ЭД; тихоходный вал МП остается неподвижным, так как происходит выбор МХ a МП, но он еще не выбран; напряжение на выходе ФИ отсутствует
(рис. 2,в) уменьшаются по экспоненте с постоянной времени, равной ЭМПВ TЭД ЭД; тихоходный вал МП остается неподвижным, так как происходит выбор МХ a МП, но он еще не выбран; напряжение на выходе ФИ отсутствует  (рис. 2,г); напряжение на выходе ПАЗ
(рис. 2,г); напряжение на выходе ПАЗ  (рис. 2,д) нарастает по экспоненте, но не достигает своего экстремального значения; МК, во-первых, производит отсчет времени выбора МХ
(рис. 2,д) нарастает по экспоненте, но не достигает своего экстремального значения; МК, во-первых, производит отсчет времени выбора МХ  МП ЭП (рис. 2,е) и, во-вторых, времени достижения экстремума напряжения
МП ЭП (рис. 2,е) и, во-вторых, времени достижения экстремума напряжения  на выходе ПАЗ (рис. 2,е), текущие значения которых МК записывает и хранит в своей SRAM-памяти данных.
на выходе ПАЗ (рис. 2,е), текущие значения которых МК записывает и хранит в своей SRAM-памяти данных.
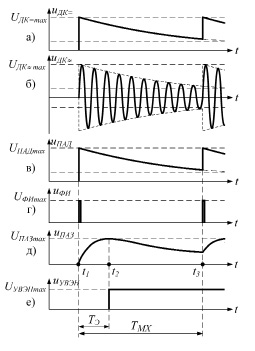
Рис. 2. Временные диаграммы работы встроенного контролера электромеханической постоянной времени электродвигателя и мертвого хода механической передачи электропривода постоянного и переменного тока по времени экстремума реакции: а – выходной сигнал ДК для двигателя постоянного тока; б – выходной сигнал ДК для двигателя переменного тока; в – выходной сигнал ПАД; г – выходной сигнал ФИ; д – выходной сигнал ПАЗ первого порядка; е – выходной сигнал УВЭН
В момент времени  (рис. 2) в контроллере происходят следующие физические процессы: ЭД постоянного или переменного тока продолжает вращение; напряжение на ДК
(рис. 2) в контроллере происходят следующие физические процессы: ЭД постоянного или переменного тока продолжает вращение; напряжение на ДК  (рис. 2,а) или
(рис. 2,а) или  (рис. 2,б) продолжает уменьшаться по экспоненте; напряжение на выходе ФИ остается равным нулю
(рис. 2,б) продолжает уменьшаться по экспоненте; напряжение на выходе ФИ остается равным нулю  (рис. 2,г); напряжение на выходе ПАЗ достигает своего экстремального значения
(рис. 2,г); напряжение на выходе ПАЗ достигает своего экстремального значения 
 (рис. 2,д); напряжение на выходе УВЭН скачком принимает максимальное значение
(рис. 2,д); напряжение на выходе УВЭН скачком принимает максимальное значение  (рис. 2,е); МК, во-первых, продолжает отсчет времени выбора МХ
(рис. 2,е); МК, во-первых, продолжает отсчет времени выбора МХ  МП ЭП (рис. 2,е) и, во-вторых, прекращает отсчет времени достижения экстремума напряжения выходного сигнала ПАЗ первого порядка
МП ЭП (рис. 2,е) и, во-вторых, прекращает отсчет времени достижения экстремума напряжения выходного сигнала ПАЗ первого порядка  (рис. 2,г), которое запоминается в SRAM памяти данных МК в размерности [c].
(рис. 2,г), которое запоминается в SRAM памяти данных МК в размерности [c].
В интервале времени  (рис. 2) в контроллере протекают следующие физические процессы: ЭД постоянного или переменного тока продолжает вращение; напряжение на ДК
(рис. 2) в контроллере протекают следующие физические процессы: ЭД постоянного или переменного тока продолжает вращение; напряжение на ДК  (рис. 2,а) и
(рис. 2,а) и  (рис. 2,б) продолжает уменьшаться по экспоненте; тихоходный вал МП ЭП продолжает оставаться неподвижным, так как продолжается выбор МХ МП, но он еще не выбран; напряжение на выходе ФИ равно нулю
(рис. 2,б) продолжает уменьшаться по экспоненте; тихоходный вал МП ЭП продолжает оставаться неподвижным, так как продолжается выбор МХ МП, но он еще не выбран; напряжение на выходе ФИ равно нулю  (рис. 2,г); МК, во-первых производит расчет ЭМПВ TЭД ЭД постоянного или переменного тока численным методом из трансцендентного уравнения (2) по известным численным значениям TАЗ, k (находятся в энергонезависимой EEPROM-памяти данных) и TЭ (запомнено в SRAM-памяти данных в момент времени
(рис. 2,г); МК, во-первых производит расчет ЭМПВ TЭД ЭД постоянного или переменного тока численным методом из трансцендентного уравнения (2) по известным численным значениям TАЗ, k (находятся в энергонезависимой EEPROM-памяти данных) и TЭ (запомнено в SRAM-памяти данных в момент времени  на рис. 2), во-вторых, записывает в SRAM-памяти данных рассчитанное численное значение ЭМПВ TЭД ЭД постоянного или переменного тока в размерности [c] и высвечивает измеренное численное значение ЭМПВ TЭД ЭД постоянного или переменного тока в первых четырех разрядах девятиразрядного СЗИ – АЛС356А с точностью до тысячной доли секунды, в-третьих, продолжает отсчет времени выбора МХ
на рис. 2), во-вторых, записывает в SRAM-памяти данных рассчитанное численное значение ЭМПВ TЭД ЭД постоянного или переменного тока в размерности [c] и высвечивает измеренное численное значение ЭМПВ TЭД ЭД постоянного или переменного тока в первых четырех разрядах девятиразрядного СЗИ – АЛС356А с точностью до тысячной доли секунды, в-третьих, продолжает отсчет времени выбора МХ  МП ЭП (рис. 2,е).
МП ЭП (рис. 2,е).
В момент времени  (рис. 2) в контроллере происходят следующие процессы: закончен выбор МХ МП ЭП и приходит во вращение тихоходный вал МП и нагрузка; величина нагрузки на ЭД постоянного или переменного тока скачкообразно возрастает и в обмотке якоря или статора вновь возникает импульс пускового тока, который создает на ДК импульс постоянного напряжения
(рис. 2) в контроллере происходят следующие процессы: закончен выбор МХ МП ЭП и приходит во вращение тихоходный вал МП и нагрузка; величина нагрузки на ЭД постоянного или переменного тока скачкообразно возрастает и в обмотке якоря или статора вновь возникает импульс пускового тока, который создает на ДК импульс постоянного напряжения  (рис. 2,а) или импульс переменного напряжения
(рис. 2,а) или импульс переменного напряжения  (рис. 2,б); сигнал с ДК поступает на ФИ, который вырабатывает второй короткий импульс
(рис. 2,б); сигнал с ДК поступает на ФИ, который вырабатывает второй короткий импульс  (рис. 2,г), поступающий на МК; МК, во-первых, заканчивает отсчет времени выбора МХ
(рис. 2,г), поступающий на МК; МК, во-первых, заканчивает отсчет времени выбора МХ  МП (рис. 2,е) и запоминает его значение в SRAM-памяти данных в размерности [c] а, во-вторых производит расчет МХ a МП ЭП постоянного или переменного тока по заданному алгоритму – формула (1) и высвечивает измеренное численное значение
МП (рис. 2,е) и запоминает его значение в SRAM-памяти данных в размерности [c] а, во-вторых производит расчет МХ a МП ЭП постоянного или переменного тока по заданному алгоритму – формула (1) и высвечивает измеренное численное значение  в последних четырех разрядах девятиразрядного СЗИ – АЛС356А с точностью до тысячной доли градуса.
в последних четырех разрядах девятиразрядного СЗИ – АЛС356А с точностью до тысячной доли градуса.
Выводы
Введение во встроенный контролер ЭМПВ TЭД ЭД и МХ  МП ЭП постоянного или переменного тока по времени экстремума реакции ПАЗ [20]: ПАД [9], вход которого подключен к ДК (см рис. 2), а выход соединен со входами ФИ и ПАЗ первого порядка; восьмибитного МК ATmega8515 с FLASH-памятью программ, EEPROM- и SRAM-памятью данных; девятиразрядного СЗИ АЛС356А; первая линия порта МК, настроенная как вход, подключена к выходу ФИ, вторая линия порта МК, настроенная как вход, подключена к выходу УВЭН, а семнадцать линий портов МК, настроенные как выход, подключены к девятиразрядному СЗИ АЛС356А, что обеспечило:
МП ЭП постоянного или переменного тока по времени экстремума реакции ПАЗ [20]: ПАД [9], вход которого подключен к ДК (см рис. 2), а выход соединен со входами ФИ и ПАЗ первого порядка; восьмибитного МК ATmega8515 с FLASH-памятью программ, EEPROM- и SRAM-памятью данных; девятиразрядного СЗИ АЛС356А; первая линия порта МК, настроенная как вход, подключена к выходу ФИ, вторая линия порта МК, настроенная как вход, подключена к выходу УВЭН, а семнадцать линий портов МК, настроенные как выход, подключены к девятиразрядному СЗИ АЛС356А, что обеспечило:
1. Возможность оперативного встроенного измерения ЭМПВ TЭД ЭД, как постоянного, так и перемененного тока, и высвечивания измеренного численного значения ЭМПВ TЭД ЭД постоянного или переменного тока в первых четырех разрядах девятиразрядного СЗИ – АЛС356А с точностью до тысячной доли секунды.
2. Возможность оперативного встроенного измерения МХ a МП ЭП, как постоянного, так и перемененного тока, и высвечивания измеренного численного значения МХ a МП ЭП постоянного или переменного тока в последних четырех разрядах девятиразрядного СЗИ – АЛС356А с точностью до тысячной доли градуса.
Библиографическая ссылка
Анкудинов К.А., Карпов Е.Б., Карпов И.Е. ВСТРОЕННЫЙ КОНТРОЛЛЕР ЭЛЕКТРОМЕХАНИЧЕСКОЙ ПОСТОЯННОЙ ВРЕМЕНИ ЭЛЕКТРОДВИГАТЕЛЯ И МЕРТВОГО ХОДА МЕХАНИЧЕСКОЙ ПЕРЕДАЧИ ЭЛЕКТРОПРИВОДА ПО ВРЕМЕНИ ЭКСТРЕМУМА РЕАКЦИИ // Современные наукоемкие технологии. 2014. № 12-1. С. 10-15;URL: https://top-technologies.ru/en/article/view?id=34800 (дата обращения: 02.08.2026).