


Scientific journal
Modern high technologies
ISSN 1812-7320
"Перечень" ВАК
ИФ РИНЦ = 1,279
THE AIRCRAFT VTOL DISCOID LAYOUT

На сегодняшний день наиболее изученным и применяемым классом вентиляторных летательных аппаратов следует признать аппараты с осевым расширением рабочего тела, у которых подъемная сила создается за счет давления, действующего на нижнюю поверхность лопаток вентилятора и конструктивные элементы туннеля. Что касается технических решений, использующих центростремительное или центробежное расширение рабочего тела, то их аэродинамика и варианты компоновки все активней начинают привлекать внимание исследователей.
Так, в материалах доклада Главного инженера ООО «ПКФ Нева Плюс» к.т.н. А.П. Ушакова, представленных на Первом московском Международном форуме «Беспилотные многоцелевые комплексы в интересах ТЭК» «UVS-TECH 2007», отражены результаты исследований, опыт проектирования и производства таких аппаратов.
Аэродинамические особенности исследуемых схем
Особенности таких схем выразились в следующем:
- относительная компактность;
- безопасность эксплуатации за счет отсутствия внешних вращающихся частей;
- ветроустойчивость, обеспеченная осесимметричной компоновкой и, как следствие, довольно низким коэффициентом подъемной силы дисковидного корпуса;
- отсутствие низкочастотных вибраций, присущих летательным аппаратам вертолетных схем из-за работы автомата перекоса;
- относительная простота аэродинамических исполнительных органов управления;
- возможность достижения больших высот полета за счет увеличения давления торможения истекающего из кольцевого сопла аппарата потока воздуха;
- достижение более высокого КПД за счет отсутствия потерь на компенсацию реактивного момента и отрицательной тяги, возникающей при обдуве корпуса;
- относительно небольшой разнос масс, позволяющий иметь довольно высокую маневренность аппарата.
По направлению течения отбрасываемого воздуха (далее рабочего тела РТ) летательные аппараты данных схем могут быть выделены в три класса:
- с осевым направлением расширения РТ;
- с центробежным направлением расширения РТ;
- с центростремительным направлением расширения РТ.
Подъемная сила в каждом из этих классов аппаратов может создаваться за счет следующих составляющих:
- наддува нижней поверхности круглого крыла;
- отсоса воздуха с верхней поверхности крыла;
- использование эффекта Коанда для создания разряжения на верхней поверхности крыла;
- за счет совместного действия всех или части этих сил;
- за счет эжектирующего действия выходящей струи воздуха на поверхность кольцевого крыла.
Предлагаемая аэродинамическая схема аппарата
Технический результат, полученный интеграцией используемых аэродинамических эффектов и особенностей компоновки аппарата, поясняется чертежами, где:
на рис. 1 – вид аппарата сбоку в разрезе в полете и на земле;
на рис. 2 – вид аппарата сверху;
на рис. 3 – схема возникновения равных дополнительных аэродинамических сил yдоп.;
на рис. 4 – схема возникновения дополнительных аэродинамических сил Yдоп., создающих Мтангажа при виде на аппарат сбоку в горизонтальном полете; φ – угол отклонения вертикальной оси кольцевого крыла управления по тангажу и крену; б1, б2 – величина зазора, характеризующая удаление верхней поверхности кольцевого крыла управления по тангажу и крену от кольцевого сопла центробежного вентилятора; б1+ – увеличение зазора б1 по отношению к зазору б2; б2+ – увеличение зазора б2 по отношению к зазору б1; ← НП – направление полета; ← П – направление нагнетаемого потока центробежным вентилятором;
на рис. 5 – схема возникновения неравных дополнительных аэродинамических сил Yдоп., создающих Мкрена при виде на аппарат спереди;
Конструкция аппарата
Летательный аппарат вертикального взлета и посадки (рис. 1, рис. 2) снабжен двухприводным силовым агрегатом взаимопротивоположного вращения. В состав силового агрегата входит вентилятор 1, размещенный в туннеле 2, который приводится во вращение приводом осевого вентилятора 3 и закреплен посредством пилонов 4 внутри туннеля 2. Нижняя торцевая часть туннеля 2 оснащена лопатками диффузора 5. В состав силового агрегата также входит центробежный вентилятор 6, приводимый в противоположное вращение приводом центробежного вентилятора 7, закрепленный на плате крепления привода 8 в корпус 9.
Наружный дисковидный корпус 10 летательного аппарата спрофилирован в виде поверхности «Коанда». Корпус 10 посредством лопаток диффузора 5 осевого вентилятора 1 состыкован с туннелем 2 осевого вентилятора 1 и при своей работе является устройством, способным создавать подъемную силу.
К внутренней поверхности наружного дисковидного корпуса 10 прикреплены лопатки диффузора центробежного вентилятора 11, а к её периферийной части спрямляющие лопатки диффузора 12. Внутри наружного дисковидного корпуса 10 размещен эквидистантно его внутренней поверхности удобообтекаемый модуль оборудования и целевой нагрузки 13, образованный верхней обшивкой двойной кривизны 14, нижней обшивкой двойной кривизны 15 и съемной формообразующей крышкой люка обслуживания 16. При этом верхняя обшивка двойной кривизны 14 модуля 13 подкреплена меридиональными элементами каркаса 17 и экваториальными элементами каркаса 18. На максимальном радиусе удобообтекаемого модуля оборудования и целевой нагрузки 13 установлены с возможностью поступательного перемещения в радиальном направлении выдвижные лопатки управления по курсу 19, которые в четном количестве связаны тросовой проводкой управления 20 с объединенным узлом управления по курсу 21. Поворот объединенного узла управления по курсу задается одним из сервоприводов системы управления 22. В силовой конструкции удобообтекаемого модуля оборудования и целевой нагрузки 13, в его периферийной части, со стороны нижней обшивки двойной кривизны вмонтированы узлы крепления опор шасси 23 со стойками опор шасси 24, которые являются скользящими направляющими, обеспечивающими независимое качание кольцевого крыла управления по тангажу и крену 25 на эластомерных втулках 26. Внутри стоек опор шасси 24 посредством резьбового соединения закреплены пружинящие стойки опор шасси 27 с амортизаторами 28, которые опираются на эластичные опорные башмаки 29.
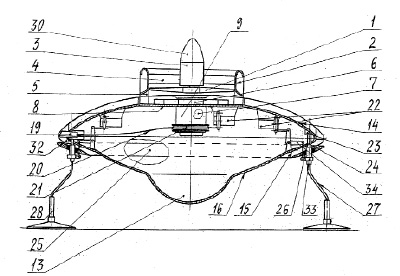
Рис. 1
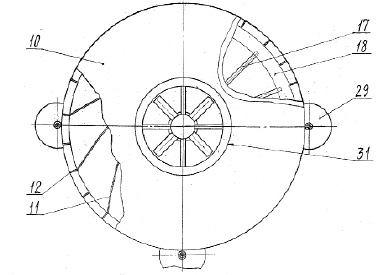
Рис. 2
Привод осевого вентилятора 3 в своей верхней части закрыт носовым обтекателем 30. Нижняя торцевая часть туннеля 2, оснащенная лопатками диффузора 5, образует кольцевое сопло осевого вентилятора 31 и предназначена для подачи потока воздуха на поверхность наружного дисковидного корпуса 10 летательного аппарата, спрофилированного в виде поверхности «Коанда».
Верхняя обшивка двойной кривизны 14, плавно переходящая в нижнюю часть обшивки 15 эквидистантно нижней части наружного дисковидного корпуса 10, образует кольцевой канал, переходящий в кольцевое сопло центробежного вентилятора 32. Кольцевое сопло обеспечивает центростремительное расширение потока воздушной струи. Выходящая из сопла воздушная струя на своем пути обтекает кольцевое крыло управления по тангажу и крену 25. Кольцевое крыло управления по тангажу и крену 25 приводится в движение (качание) приводными кронштейнами 33, соединенными тягами и качалками с системой 34 наклона кольцевого крыла управления.
Особенности силового агрегата
Для повышения общей тяговооруженности аппарата в данном техническом решении используется двухприводной силовой агрегат взаимопротивоположного вращения. В состав силового агрегата, кроме высокооборотного привода центробежного вентилятора 7, вращающего центробежный вентилятор 6, входит привод осевого вентилятора 3, оснащенный осевым вентилятором 1 в туннеле 2 и который имеет противоположное вращение по отношению к приводу центробежного вентилятора 7. Данный агрегат расположен над наружным дисковидным корпусом 10 с зазором, равным высоте кольцевого сопла осевого вентилятора 31. Он нагнетает поток воздуха в туннеле осевым вентилятором 2 и в соответствии с конфигурацией наружного дисковидного корпуса 10 в месте установки туннеля 2 обеспечивает поворот воздушной струи на угол около 85 градусов, инициируя его интенсивное истечение из кольцевого сопла осевого вентилятора 31. Поток, истекая из кольцевого сопла осевого вентилятора 31 вдоль внешней поверхности наружного дисковидного корпуса 10, выполненной в соответствии с математическим описанием поверхности «Коанда», обеспечивает возникновение второй дополнительной аэродинамической подъемной силы аппарата.
Работа агрегата центростремительного расширения потока воздушной струи
Перед выполнением взлета аппарата (рис. 1, рис. 2) включается двухприводной силовой агрегат взаимопротивоположного вращения. Высокооборотный привод центробежного вентилятора 7, входящий в двухприводной агрегат, вращает центробежный вентилятор 6. Центробежный вентилятор 6 сжимает воздух и нагнетает его между верхней обшивкой двойной кривизны 14 и внутренней поверхностью наружного дисковидного корпуса 10. Там же, между верхней обшивкой двойной кривизны 14 и внутренней поверхностью наружного дисковидного корпуса 10, размещены лопатки диффузора центробежного вентилятора 11. Нагнетаемый поток воздуха проходит между лопатками диффузора 11, расширяется, преобразуя таким образом в соответствии с законом Бернулли энергию скоростного напора воздуха в энергию давления. Кроме того, направление закрутки лопаток диффузора 11 создает силу, позволяющую уменьшить действие реактивного момента от силовой установки на конструкцию аппарата. На входе потока воздуха в кольцевое сопло центробежного вентилятора 32 происходит его выравнивание спрямляющими лопатками 12. Струя воздуха, истекая из кольцевого сопла центробежного вентилятора 32 в центростремительном направлении (рис. 3), обтекает верхнюю поверхность кольцевого крыла управления по тангажу и крену 25 и создает на его поверхности аэродинамические силы Yдоп.1 и Yдоп.2, Yдоп.1 = Yдоп.2. Данное распределение аэродинамических сил характерно для полета аппарата в конфигурации зависания. Величина аэродинамических сил может меняться в зависимости от удаления верхней поверхности кольцевого крыла управления по тангажу и крену 25 от кольцевого сопла центробежного вентилятора 32 с зазором б1 и б2 (рис. 4, где б1 > б2; Yдоп.1 < Yдоп.2), (рис. 5, где б1 < б2; Yдоп.1 > Yдоп.2). При этом изменение интенсивности обдува верхней поверхности кольцевого крыла управления по тангажу и крену 25 приводит к соответствующему изменению величин управляющих моментов Мтангажа, Мкрена, что и легло в основу принципа управления данным аппаратом вокруг осей X и Z.
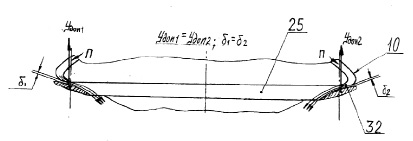
Рис. 3
Для реализации возможности заданного изменения интенсивности обдува верхней поверхности кольцевого крыла управления по тангажу и крену 25 и создания таким образом контролируемых управляющих моментов Мтангажа и Мкрена оно подвешено шарнирно с возможностью качания вокруг осей X и Z на 4-х эластомерных втулках 26. Эластомерные втулки 26 своими центральными частями имеют возможность скользить вдоль осей стоек опор шасси 24. При этом периферийные части эластомерных втулок 26 закреплены в конструкции кольцевого крыла управления по тангажу и крену 25. Такая схема подвески кольцевого крыла управления по тангажу и крену 25 позволяет его противоположно расположенным частям попеременно то удаляться, то приближаться к кольцевому соплу центробежного вентилятора 32 с переменным зазором б1, б2. В результате этого меняется интенсивность обдува этих участков кольцевого крыла 25. Сам процесс качания кольцевого крыла управления по тангажу и крену 25 во всем диапазоне его отклонений на заданные углы практически не сказывается на аэродинамике полета аппарата ввиду очень малых относительных значений углов его отклонения.
Управление по тангажу
Управление аппаратом по тангажу посредством изменения интенсивности обдува верхней поверхности кольцевого крыла управления по тангажу и крену 25 производится следующим образом. После получения команды (например, угол тангажа должен быть отрицательным, направление полета влево НП) (рис. 4) задний участок верхней поверхности кольцевого крыла управления по тангажу и крену 25 относительно кольцевого сопла центробежного вентилятора 32 имеет величину зазора б2, интенсивность его обдува неизменна, а величина аэродинамической силы равна Yдоп.2. При этом передний участок кольцевого крыла 25 отклоняется сервоприводом 22 на величину зазора б1+ между кольцевым крылом 25 и кольцевым соплом 32. В этом случае падает интенсивность обдува переднего участка кольцевого крыла 25, что ведет к уменьшению величины аэродинамической силы Yдоп.1. Соответственно, момент управляющего воздействия (Мтангажа), возникающий от аэродинамической силы Yдоп.2, на плече, близком к величине радиуса кольцевого крыла 25, заставляет этот участок кольцевого крыла 25 опускаться вместе с наружным дисковидным корпусом 10. В режиме горизонтального полета это приводит к выходу аппарата на отрицательный угол тангажа, т.е. полету со снижением.
Для увеличения угла тангажа аппарата обдуваемый участок кольцевого крыла управления по тангажу и крену 25 меняется на противоположно расположенный. В этом случае отклонение сервоприводом 22 осуществляется через систему наклона кольцевого крыла 34 заднего участка кольцевого крыла 25 до величины зазора б2+.
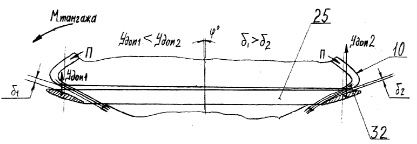
Рис. 4
Управление по крену
В случае получения команды на изменение угла крена (например, крен должен быть «вправо») (рис. 5) левый участок верхней поверхности кольцевого крыла управления по тангажу и крену 25 относительно кольцевого сопла центробежного вентилятора 32 имеет величину зазора б1, интенсивность его обдува неизменна, а величина аэродинамической силы равна Yдоп.1. При этом правый участок кольцевого крыла 25 после получения команды на изменение угла крена отклоняется одним из сервоприводов 22 до величины зазора б2+ между кольцевым крылом 25 и кольцевым соплом 32. В этом случае уменьшается интенсивность обдува правого участка кольцевого крыла 25, что ведет к уменьшению величины аэродинамической силы Yдоп.2. Соответственно, момент управляющего воздействия (Мкрена), возникающий от аэродинамической силы Yдоп.1, на плече, близком к величине радиуса кольцевого крыла 25, заставляет опускаться этот участок кольцевого крыла 25 «вправо» вместе с наружным дисковидным корпусом 10, т.е. заставляет летательный аппарат крениться «вправо». В режиме горизонтального полета аппарат совершает правый крен, изменяя траекторию полета.
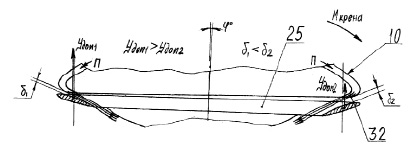
Рис. 5
Для осуществления крена аппарата «влево» обдуваемый участок кольцевого крыла управления по тангажу и крену 25 меняется на противоположный. В этом случае отклонение одним из сервоприводов 22 осуществляется через систему наклона кольцевого крыла 34 левого участка кольцевого крыла 25 до величины зазора б1+.
Система наклона кольцевого крыла 34 включает в себя сервоприводы 22, которые посредством жесткой проводки управления связаны с центральными частями эластомерных втулок 26 и приводными кронштейнами кольцевого крыла управления 33. Реализуя команды управления аппаратом во всех конфигурациях полета, сервоприводы 22 через систему наклона кольцевого крыла 34 и приводные кронштейны кольцевого крыла управления 33 передают усилия на кольцевое крыло управления по тангажу и крену 25. Эластомерные втулки 26, закрепленные в конструкции кольцевого крыла 25, имеют возможность своими центральными частями скользить по поверхности стоек опор шасси 24 вдоль их оси и обеспечивать таким образом возможность независимого качания кольцевого крыла управления по тангажу и крену 25 относительно осей X, Y. Управление аппаратом по курсу вокруг оси Y как аварийный вариант может обеспечиваться разницей величин вращающих моментов привода осевого вентилятора 3 и привода центробежного вентилятора 7, которые обеспечиваются разным по величине напряжением питания приводов.
Управление по курсу
В штатном режиме развороты аппарата вокруг вертикальной оси Y обеспечивают вводимые в поток между верхней обшивкой двойной кривизны 14 и внутренней поверхностью наружного дисковидного корпуса 10 выдвижные лопатки управления по курсу 19, которые убираются в удобообтекаемый модуль оборудования и целевой нагрузки 13. Выдвижные лопатки 19 имеют такие углы установки и площади, что способны создавать аэродинамические силы, противодействующие реактивному моменту, создаваемому комбинированным силовым агрегатом и даже превышать это значение. В убранном положении лопатки 19 не выступают за пределы габаритов удобообтекаемого модуля оборудования и целевой нагрузки 13. Действующие на лопатки 19 аэродинамические силы в этом случае равны 0.
Введение в поток и увод из потока выдвижных лопаток управления по курсу 19 осуществляется от одного из сервоприводов системы управления 22 через объединенный узел управления по курсу 21 и тросовую проводку управления по курсу 20.
Воздушный поток, истекающий из кольцевого сопла центробежного вентилятора 32, выходя за пределы кольцевого крыла управления по тангажу и крену 25, устремляется вдоль поверхности нижней обшивки двойной кривизны 15 и съемной формообразующей крышки люка обслуживания 16. Реактивная струя, расширяясь в центростремительном направлении, улучшает стабилизацию полета ЛА и обеспечивает возникновение основной аэродинамической подъемной силы аппарата.
Выводы
Обеспечиваемый технический результат создания «Летательного аппарата вертикального взлета и посадки» заключается в интеграции используемых аэродинамических эффектов и особенностей компоновки аппарата, которые позволяют придать новые свойства классу летательных аппаратов, выполненных по схеме «Летающая тарелка».
Летательный аппарат вертикального взлёта и посадки может выполнять полеты с увеличенным КПД при использовании эффективного способа управления. Аппарат ветроустойчив и может применяться в горных районах, северных широтах, а также в Военно-Морском Флоте России со снижением стоимости выполнения операций.
Летательный аппарат вертикального взлёта и посадки может быть изготовлен на небольших производственных площадях с использованием современных материалов и технологий.
Таким образом, создана концепция летательного аппарата, имеющего повышенную безопасность, надежность и эффективность при полете в условиях турбулентной атмосферы, в том числе обладающего необходимой маневренностью в широком диапазоне скоростей полета вплоть до зависания аппарата в воздухе и выполнения вертикальной посадки.
- Авторами подана заявка на изобретение «Летательный аппарат вертикального взлета и посадки» и получено Решение о выдаче патента на изобретение. Регистрационный номер в Роспатенте № 2012137970/11(061585) с приоритетом от 04.09.2012 г.
- Авторами проводятся работы по изготовлению летающей модели летательного аппарата вертикального взлёта и посадки для исследований и отработки его аэродинамических свойств, изучения динамики полета при вертикальном взлете, зависании и посадке.
Библиографическая ссылка
Воронков Ю.С., Воронков О.Ю. ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЁТА И ПОСАДКИ ДИСКОВИДНОЙ КОМПОНОВКИ // Современные наукоемкие технологии. 2014. № 8. С. 11-17;URL: https://top-technologies.ru/en/article/view?id=34616 (дата обращения: 13.07.2026).