



Для моделирования механических процессов переработки сыпучих материалов широко используется математический аппарат случайных марковских процессов дискретных в пространстве и времени. Варианты моделирования процесса или устройства могут быть разные, но общие подходы одинаковы. Все моделируемое пространство делится на ячейки, как это показано на рис. 1.
![]()
Рис.1. Графическое представление одномерной цепи Маркова
Текущее состояние системы характеризуется вектором состояния:
S(k) = [S1(k) S2(k) S3(k)…….Sm(k)], (1)
где S(k) – вектор состояния системы в момент времени t = kΔt, Δt – время одного перехода, Si(k) – вероятность нахождения частиц порции материала в ячейке i после перехода k.
Состояние системы в любой момент времени T(k+1) =(k+1)Δt определяется следующим образом:
S(k+1) = S(k)Р, (2)
где Р – матрица переходных вероятностей, имеющая следующий вид:
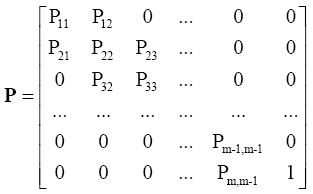 (3)
(3)
При моделировании периодического процесса смешивания сыпучих материалов [1, 2], весь материал в поперечном сечении смесителя делится на ячейки равного объема, и элемент матрицы состояния характеризует долю или концентрацию ключевого компонента в ячейке i. При моделировании процесса непрерывного смешивания сыпучих материалов в барабанном смесителе барабан делится на равные по длине участки [3] и вектор состояния характеризует распределение ключевого компонента по длине барабана. При моделировании процесса механической классификации [4] – элемент матрицы состояния характеризует содержание в ячейке i частиц определенной фракции. При моделировании процесса двухстадийного непрерывного дозирования матрица состояния характеризует распределение материала по длине преобразователя, что позволяет, в конечном итоге определить колебания производительности на выходе из дозатора [5].
В ряде случаев, при моделировании механического процесса переработки сыпучих материалов необходимо учитывать не только диффузионный обмен частицами между соседними ячейками, но и конвективный обмен. Например, такая ситуация возникает при моделировании процесса непрерывного двухстадийного дозирования [6, 7]. Сущность двухстадийного дозирования заключается в следующем: на первой стадии порционным дозатором формируются отдельные порции весом ΔР; на второй стадии эти порции, через равные промежутки времени ΔТ подаются в наклонный, где они преобразуются в не5прерывный поток. Экспериментально было установлено [5], что в процессе преобразования изменяется форма порции и центр тяжести порции перемещается вдоль лотка. Процесс изменения формы порции можно рассматривать, как диффузионный, а процесс перемещения всей порции, как конвективный. Для моделирования конвективного процесса использовали матрицу перемещений:
PM = 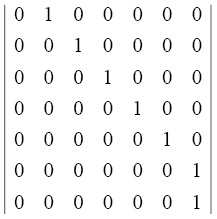 (6)
(6)
Было разработано две программы для моделирования процесса ссыпания сыпучих материалов со схожим функционалом, но разной областью применимости: первая представляет собой готовую программу работающую независимо, вторая является файл-функцией для пакета Matlab.
В докладе дано подробное описание программ и примеры их работы, которые показывают, что использование дополнительной матрицы перемещений позволяет обеспечить независимость между диффузионным и конвективным обменом частиц, что особенно важно при моделировании процесса смешивания сыпучих материалов [8, 9].