



В настоящей работе приведено обоснование схемы дробильной машины с двумя взаимоподвижными щеками дробления.
Состоит дробильная машина (рис. 1) из кривошипа 1, который соединяется с приводным двигателем, приводного звена 2, упорной щеки 3, щеки дробления 4 и трехпарного балансирного звена 5.
Работает механизм следующим образом. Кривошип 1 приводит в движение приводное звено 2, которое сближает подвижные щеки 3 и 4, заставляя тем самым их измельчать обрабатываемый материал 6.
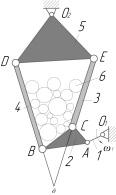
Рис. 1. Схема дробильной машины со взаимоподвижными щеками

Рис. 2. План скоростей дробильной машины со взаимоподвижными щеками
Сущность этой схемы дробильной машины заключается в том, что щека дробления и щека упора составляют между собой единую конструкцию, приводимую в работу от единого привода. Такая машина может легко устанавливаться в промышленных помещениях без привязки к неподвижной щеке.
Для определения скоростей всех точек механизма на продолжениях поводков DB и CE [1], найдем особую точку δ, принадлежащую звеньям 2 и 5. При известных скоростях точек A и O2 (VO2=0), найдем скорость точки δ по формулам:
Зная скорости точек A и δ и то, что обе точки принадлежат звену ABC, найдем скорость точки B по следующим уравнениям:
Затем, находим скорость точки С по формулам
После нахождения скоростей точек приводного звена 2, легко найти скорости точек D и E:
Решение приведенных векторных уравнений показано на плане скоростей (рис. 2). Построив планы скоростей n положений механизма, можно установить закон движения точек механизма в процессе его работы.