



В современной практике эксплуатации станков с числовым программным управлением (ЧПУ) широко применяется в качестве диагностического средства испытание точности круговой интерполяции. Такой тест позволяет определить как точностные возможности станка в плане обработки сложных поверхностей, так и (при наличии соответствующего программного обеспечения) оценить геометрическую точность станка вообще. Наиболее эффективно выполнять испытание точности круговой траектории с применением системы типа ballbar, например, фирмы Renishow, или KGM фирмы Heidenhain. Однако такая оснастка имеет весьма высокую стоимость, и не все предприятия могут позволить себе это оснащение.
Стандарт [1] предусматривает выполнение испытаний такого вида более простым способом – обкаткой эталонной оправки. Но стандарт не устанавливает ни конкретной методики испытания, ни методологии обработки результатов. Можно предложить следующий порядок проведения испытания:
1. Установить и закрепить в шпинделе станка контрольную оправку 3. Установить и закрепить на столе станка державку 2.
2. Совместить оси державки 2 и оправки 3 (рис. 1), например, с помощью центроискателя. В системе ЧПУ перейти в область управления «Параметры», в раздел «Смещение нуля». Установить фактические координаты по Х и Y как нуль программы, например, под адресом G54.

Рис. 1
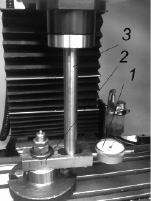
Рис. 2
3. Переместить стол станка на величину RP = 50 мм по оси Х в режиме ручного ввода данных (MDI).
4. Опустить шпиндельную бабку вниз так, чтобы оправка 3 вошла в паз планки (рис. 2).
5. Установить и закрепить в планке индикатор 1, выставить его на «0».
6. Набрать в режиме MDI программу круговой интерполяции по часовой стрелке. Можно выполнять движение по дуге с обычной рабочей подачей порядка 100 мм/мин, останавливаясь через каждые 5°. В системе ЧПУ SINUMERIK 840D кадр такого перемещения может выглядеть так:
G2G54G91AR=5RP=50F100.
7.1. Включить отработку кадра. После остановки движения, зафиксировать отклонение δr по индикатору 1. Занести данные в Microsoft Excel в виде следующей таблицы:
Таблица 1
|
№ |
X |
Y |
δr |
θ |
R+ δr |
Возобновить отработку программы, повторяя эти действия до прохождения полной окружности.
7.2. В некоторых системах ЧПУ бывает невозможно программировать движение по дуге в полярных координатах в приращениях. В этом случае можно выполнять останов программы через равные промежутки времени t (с):
 , (1),
, (1),
где F – скорость подачи, мм/мин; n – число контрольных точек по окружности, зависит от требуемой точности испытания.
Кадр для отработки круговой интерполяции может выглядеть так:
G2G54X50Y0I-50J0F100.
Запустить программу круговой интерполяции. Через каждые t секунд останавливать программу, фиксировать координаты X и Y по дисплею системы ЧПУ и отклонение δr по индикатору 1. Записать данные в табл. 1. Возобновить отработку программы до прохождения полной окружности.
8. Построить график отклонений в полярной системе координат. В качестве радиус-вектора принимается величина δr, полярный угол θ определяется (если программирование движения производилось по методике 7.2.):
 , (2),
, (2),
если Y>0, то θ остается без изменений, если Y<0, то θ = – θ.
9. Аналогично пп. 6-7 отработать программу круговой интерполяции против часовой стрелки (G3). Построить график в той же системе координат, что в п.8.
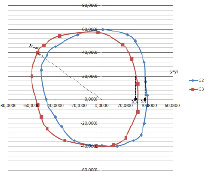
Рис. 3
9. В качестве результата – отклонения траектории круговой интерполяции от круглости – принимается наибольшее значение δrmax (рис. 3) Дополнительно можно оценить люфт в приводе подачи как разность абсцисс для оси Х:
 (3)
(3)
или ординат для оси Ш точек графиков интерполяции G2 и G3.
Таким образом, на основе результатов диагностики можно оценить возможности станка по обеспечению необходимой точности обработки круговых контуров.