


Scientific journal
Modern high technologies
ISSN 1812-7320
"Перечень" ВАК
ИФ РИНЦ = 1,279
SYSTEM «of propellers in tunnels» FOR UNMANNED AIRCRAFT

Как известно, малогабаритные переносные комплексы воздушного мониторинга (ПКВМ), формируемые на основе беспилотных малоразмерных летательных аппаратов массой до 5 кг, способны решать задачи воздушного наблюдения, картографирования, исследования состояния зданий и сооружений, осуществлять контроль движения на автомагистралях и многое другое. Создание ПКВМ стало возможным благодаря современным достижениям в области аэродинамики малых чисел Рейнольдса, многокритериальных высокоточных малогабаритных систем навигации и управления, принципов организации систем связи с высокой скоростью передачи данных, а также новых способов съема и передачи информации с борта потребителю. Результатом использования подобных достижений является относительно низкая стоимость комплекса, которая сравнима со стоимостью легкового автомобиля, при возможностях, приближающихся к возможностям военных БЛА. Легальное применение таких комплексов возможно в рамках нормативно-правовой базы, созданной для радиоуправляемых летающих моделей. Все это открывает перспективы создания совершенно нового и достаточно емкого рынка сбыта авиационной техники.
Крыло или несущий винт
Входящие в состав комплексов ПКВМ малоразмерные летательные аппараты (МЛА), выполненные по самолетной схеме, получили широкое распространение в противоположность летательным аппаратам «вертолетного» типа, что объясняется целым рядом причин.
Во-первых, конструкция, изготовление и функционирование беспилотных крылатых летательных аппаратов (ЛА) являются экстраполяцией авиационной технологии пилотируемых аппаратов и, следовательно, могут выполняться относительно просто и экономично. В частности, аэродинамические характеристики таких аппаратов хорошо документированы, а их пилотаж, будь то с помощью дистанционных команд, передаваемых по каналам передачи данных на борт, или посредством реализации программ, заложенных в бортовой компьютер, осуществляется относительно просто и понятно.
Во-вторых, радиус действия и скорость таких ЛА обычно больше, чем у аппаратов вертолетного типа, а их более высокая грузоподъемность позволяет крылатым аппаратам нести большую целевую нагрузку и больший запас топлива, благодаря чему увеличивается их боевая эффективность. Эти качества делают крылатые ЛА более пригодными, чем ЛА вертолетного типа, для решения задач определенного характера, в рамках которых критичными являются рабочий ресурс, дальность действия и грузоподъемность.
Однако крылатые ЛА имеют существенный недостаток, который ограничивает их применение. Так, для оптимального выполнения многих типовых задач необходимо, чтобы они имели возможность сохранять пространственную систему отсчета координат неподвижной относительно статических точек на земле в течение продолжительного времени, например, при захвате цели. Известно, что летные свойства крылатых ЛА не позволяют им зависать, сохраняя пространственную систему отсчета координат неподвижной относительно статических точек на земле.
В противоположность этому, ЛА вертолетного типа подходят для решения задач, требующих зависания, но их эксплуатация достаточно сложна и требует специального обеспечения.
Изолированный воздушный винт или «винт в кольце, туннеле»
В случае повреждения беспилотного вертолета в полете его спасение практически невозможно. Парашютные системы спасения вертолетов хоть и существуют, но ими на практике не пользуются. В совокупности с низкой безопасностью из-за вращающегося несущего винта большого диаметра, беспилотные вертолеты остаются средством спецприменения, где решаемые ими задачи окупают затраты на эксплуатацию и их содержание. Таким образом, сложности эксплуатации вертолетов оставляют незаполненным сектор задач, требующих видеонаблюдения с близкого расстояния при зависании или точной посадки в ограниченный район. Все эти задачи могут быть решены посредством малоразмерных летательных аппаратов, построенных по схеме «Воздушные винты в кольце» или «Воздушные винты в туннеле». Поскольку несущие винты таких аппаратов находятся в специальном профилированным туннеле, то их применение может быть довольно широким, в том числе в условиях городских застроек, в лесных массивах, без опасения соударения винтов с деревьями, строениями и т.д.
При взлете и посадке такие аппараты неприхотливы и безопасны для обслуживающего персонала. Основными недостатками по сравнению с вертолетами является их сравнительно низкий КПД. Однако современные технологии и конструктивные решения позволяют успешно бороться и с этим явлением.
В настоящее время разработкой таких аппаратов занимаются в США (Honeywell, Allied Aerospace, Aurora Flight Sciences, Lutronics), Великобритании (BAE Systems), Италии (UTRI), Сингапуре (Singapore Technolojies Aerospace) России (НТЦ «Рисса»), Франции (Orion) и ряде других стран.
«Воздушные винты в туннеле» для стендовой отработки
Так, в 2005 году по инициативе Городской общественной организации Благотворительного общества научно-технического творчества и экологии «Ювенал» города Таганрога был создан относительно дешевый экспериментальный образец малоразмерного летательного аппарата вертикального взлета и посадки МЛАВВП-02Э и проведены его испытания на базе одного из предприятий города. Он являлся прототипом разрабатываемого аппарата МЛАВВП, который входил в состав переносного комплекса воздушного мониторинга (ПКВМ) «Вертикаль», предназначенного для телевизионного наблюдения в реальном масштабе времени местности и объектов на ней с условиями высокоточного определения координат наблюдаемых объектов.
Аппаратная и контрольно-измерительная части разработанной установки для испытаний МЛАВВП-02Э в привязном варианте предполагали её оснащение приборами контроля и замера следующих параметров и их величин: скорости полета Vx, Vy, Vz; угловых ускорений ωx, ωy, ωz; угловых отклонений ϑ, γ, χ; линейных положений аппарата в пространстве X, Z; тяги силовой установки и её изменения T, ΔT; оборотов электродвигателей n1, n2 и их разницы Δn; индуктивной скорости вертикального полета υ; углов отклонения рулевых поверхностей δр.п; времени проведения эксперимента и отдельных процессов t.
Сам объект испытаний – летательный аппарат МЛАВВП-02Э (рис. 1, 2) – был выполнен по схеме «Воздушные винты в туннеле» с двумя соосными несущими воздушными винтами 1, 2 противоположного вращения размещенными в туннеле 3.
Аппарат содержал верхнюю и нижнюю цилиндрические секции фюзеляжа 4, 5, установленные соосно по оси туннеля 3, направленные противоположно от плоскостей вращения воздушных винтов 1, 2. Каждый из несущих винтов 1, 2 вращался внутри туннеля 3 между секциями фюзеляжа 4, 5 отдельным электроприводом 6, 7, выполненным на основе бесколлекторного электродвигателя постоянного тока MEGA 22/30/2. Каждый из двух электроприводов 6, 7 был размещен в своей секции фюзеляжа 4, 5, выполняющей одновременно и функцию мотогондолы.
В верхней секции фюзеляжа 4, кроме электропривода 6, размещались компоненты целевой нагрузки 8, которые были выполнены в виде отдельных, легко заменяемых модулей.
Размещение оборудования в верхней секции фюзеляжа 4 обеспечивалось по принципу «наименьшего разноса масс», оказывающего заметное влияние на устойчивость аппарата в полете.
Нижняя секция фюзеляжа 5 была снабжена отклоняемыми во взаимно перпендикулярных плоскостях рулевыми поверхностями 9, которые находились в воздушном потоке от винтов 1, 2. Действие рулевых поверхностей 9 проявлялось в отклонении на некоторый угол части отбрасываемого воздушными винтами 1, 2 потока во взаимно перпендикулярном направлении и создании, таким образом, управляющих моментов относительно осей X и Z.
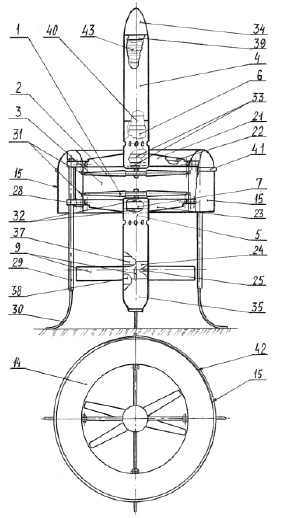
Рис. 1
Управляющий момент относительно оси Y создавался изменением оборотов одного из электроприводов 6, 7 при поступлении сигнала от датчика или по команде пилота-оператора с выносного пульта системы дистанционного управления.
Режим работы каждого из электроприводов обеспечивался отдельным регулятором оборотов 10, 11 (JES 70-ЗР) и был запитан от индивидуального наземного блока питания.
С целью устранения вредного влияния длинномерных связей регуляторов оборотов 10, 11 (JES 70-ЗР) с наземными блоками питания в цепь каждого из них были включены компенсационные аккумуляторы 12, 13 (Li-Pol 2000 mAh).
В автономном варианте полет аппарата обеспечивала батарея бортовых аккумуляторов через те же два регулятора оборотов 10, 11 (JES 70-ЗР), каждый из которых мог задавать необходимый режим работы своему электроприводу 6, 7 (MEGA 22/30/2) с полной нейтрализацией реактивных моментов, действующих на аппарат.
Туннель 3 с воздушными винтами 1, 2 в своей верхней части имел плавно сформированную к периферии отбортовку 14, выполненную в ее поперечном сечении по кривой – лемнискате, что позволяло иметь необходимое распределение давления воздушной среды по профилю туннеля при работе воздушных винтов 1, 2 и обеспечивало возникновение дополнительной подъемной силы, характерной для системы «воздушные винты в туннеле».
Плавно сформированная отбортовка туннеля 14 на периферии переходила по направлению к оси аппарата в цилиндрическую поверхность 15, образуя объем кольцевого обтекателя между внешней поверхностью 15 туннеля и его внутренней цилиндрической поверхностью 3. Этот внутренний объем кольцевого обтекателя позволял размещать в его внутреннем пространстве бортовое оборудование и энергоисточники:
1. 2 регулятора оборотов10, 11 (JES 70-ЗР).
2. 3 пьезогироскопа 17, 18, 19; (GY240).
3. Приемник системы дистанционного управления 20 (REX-7).
4. Компенсационные аккумуляторы 12, 13 (Li-Pol 2000 mAh).
5. Аккумуляторы системы автономного энергоснабжения.
6. Бортовую систему автоматизированного управления (БСАУ).
(Аккумуляторы и БСАУ на чертежах не показаны).
Верхняя и нижняя секции фюзеляжа 4, 5 были установлены соосно по оси туннеля 3 (оси кольцевого обтекателя). Каждая из секций фюзеляжа 4, 5 посредством четырех профилированных пилонов 21, 23, выполненных из металла, крепилась к туннелю (кольцевому обтекателю) посредством резьбового крепежа. В каждом пилоне 21, 23 были предусмотрены каналы 22 для монтажа жгутов энергопитания. Наличие таких каналов 22 позволяло обходить воздушные винты 1, 2 электрожгутами и обеспечивать их надежную защиту от внешних воздействий.
В нижней секции фюзеляжа 5, оснащенной управляющими поверхностями 9, был сформирован исполнительный модуль 24, который имел возможность расстыковки с секцией 5. В модуле 24 были установлены с возможностью их поворота два взаимно перпендикулярных валика 25 во втулках с рычагами. К концам валиков 25 неподвижно были прикреплены рулевые поверхности 9. Во внутренней полости модуля были размещены сервоприводы 26, 27 (NARO АСЕ), которые, могли воздействовать через тяги и рычаги на рулевые поверхности 9 и отклонять их на заданные углы в соответствии с сигналами от бортового приемника 20 (REX-7) и пьезогироскопов 17, 18, 19 (GY2400).
Основой всей конструкции аппарата МЛАВВП являлся пространственный металлический каркас, полученный в результате неразъемного соединения восьми металлических пилонов 21, 23 с верхней 4 и нижней 5 металлическими секциями фюзеляжа (с каждой по четыре пилона), расположенными по оси аппарата. Противоположные концы пилонов 21, 23 были соединены с пластинчатыми металлическими узлами 28, установленными во внутреннем объеме 16 туннеля 3 (кольцевого обтекателя). Узлы 28 содержали трубчатые опоры 29, в которых в свою очередь были закреплены пружинящие лапки 30, что обеспечивало амортизацию аппарата при посадке. Туннель 3 (кольцевой обтекатель) с профилированной отбортовкой 14 являлся единой деталью, выполненной из композитов.
В средней наружной части туннеля 3 имелись кольцевые шпангоуты 31, предназначенные, во-первых, для ужесточения конструкции туннеля 3 в зоне работы воздушных винтов 1, 2, во-вторых, для закрепления внутри кольцевого обтекателя различного оборудования, компонентов и элементов питания. Наружная поверхность кольцевого обтекателя 15 (внешний кожух), так же как и его донная часть, были выполнены из пластика. Внешний кожух 15 был выполнен в съемном варианте, обеспечивающем свободный доступ к оборудованию, оснащению, элементам питания систем и приводов аппарата.
Верхняя секция фюзеляжа 4 МЛАВВП была выполнена из тонколистового металла и имела поперечный набор в виде гнутых кольцевых шпангоутов 33, 39, 40 из специально обработанной древесины. Два кольцевых шпангоута 33 нижней части верхней секции фюзеляжа 4 являлись силовыми, обеспечивали крепление четырех пилонов 21, воспринимая и передавая усилия и моменты от электроприводов 6, 7 на каркас кольцевого обтекателя.
Головной обтекатель 34 верхней секции фюзеляжа 4 был выполнен из композитов в формообразующей матрице. Он был установлен в верхней секции фюзеляжа 4 с возможностью отстрела по команде системы аварийного спасения 43 (САС)
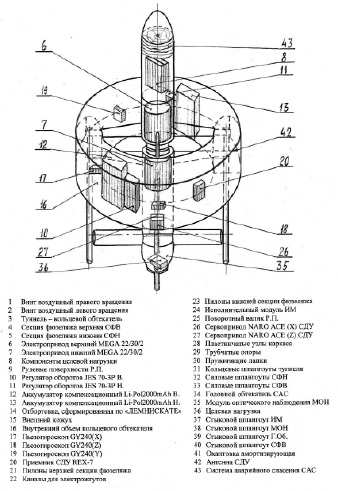
Рис. 2
Нижняя секция фюзеляжа 5 была выполнена из тонколистового металла, имела поперечный набор кольцевых гнутых шпангоутов 32, 37, 38 из древесины. Среди них были стыковые шпангоуты 37, 38, обеспечивающие возможность стыковки секции с исполнительным модулем 24, а также с модулем оптического наблюдения 35.
Два кольцевых шпангоута 32 верхней части нижней секции фюзеляжа являлись силовыми, обеспечивали крепление четырех пилонов 23, воспринимали и передавали усилия и моменты от электропривода 7 на пространственный металлический каркас аппарата.
Характерной особенностью данной схемы аппарата являлось сосредоточение двигательно-движительного комплекса на его продольной оси, достаточно удаленной от периферии кольцевого обтекателя, что должно было позволять аппарату иметь возможность во время полета довольно близко подходить к исследуемым объектам без риска удара винтами об их поверхности. Кроме того, внешний кожух 15 кольцевого обтекателя аппарата был оснащен по его периметру амортизирующей окантовкой 41, смягчающей возможные соударения аппарата с исследуемыми объектами. Во внутренней полости амортизирующей окантовки 41 была размещена антенна системы дистанционного управления 42 аппаратом, которая надежно защищена от внешних воздействий.
Предварительные результаты проведенных экспериментов
Полеты аппарата МЛАВВП-02Э на привязи с многократным взлетом, зависанием, маневрами и посадкой в управляемом режиме выявили следующее:
1. При подаче электропитания от наземных импульсных блоков питания выявлена нестабильность оборотов электроприводов и их потребляемых токов.
2. Отрыв аппарата взлетной массой 1600 г. фиксировался при потребляемом токе питания 12 А и подаваемом напряжении 12 В.
3. Возникла потребность разработки и изготовления «бортового модуля синхронизации оборотов взаимно противоположного вращения воздушных винтов», выполненного на основе микроконтроллера и адаптированного к условиям работы с бортовой аппаратурой дистанционного управления и бортовой САУ.
4. Возникала необходимость шарнирного закрепления аппарата в жестком трехстепенном подвесе, разработанном в ОНТТЭ «Ювенал», в уравновешенном состоянии с возможностью свободного ухода точки подвеса по оси Y по мере подъема аппарата за счет силы тяги.
Библиографическая ссылка
Воронков Ю.С., Воронков О.Ю. СИСТЕМА «ВОЗДУШНЫЕ ВИНТЫ В ТУННЕЛЕ»ДЛЯ БЕСПИЛОТНОЙ АВИАЦИИ // Современные наукоемкие технологии. 2013. № 3. С. 19-24;URL: https://top-technologies.ru/en/article/view?id=31498 (дата обращения: 24.07.2026).