



Введение
Современное высокотехнологичное производство характеризуется активным внедрением коллаборативных роботов-манипуляторов (коботов), которые представляют собой новое поколение робототехники, предназначенной для непосредственного взаимодействия с человеком-оператором в общем рабочем пространстве. Однако ключевой задачей становится не просто замещение человеческого труда, а оптимальное распределение функций в связке «человек – робот», где уникальные когнитивные способности оператора, такие как принятие решений в нестандартных ситуациях, адаптивность и обработка сложной сенсорной информации, сочетаются с выносливостью, точностью и силой робота-манипулятора [1–3].
Цель исследования – разработка адаптивного механизма распределения производственной нагрузки между человеком-оператором и роботом-манипулятором на основе динамической оценки психофизиологического состояния оператора.
Материалы и методы исследования
В исследовании использован комплексный подход, основанный на методах математического моделирования динамических систем и системного анализа. В работе проведен анализ рисков безопасности при совместной работе оператора с коботом. Также была рассмотрена динамика работоспособности человека-оператора с учетом типовых кривых производительности.
Для формализации выявленных закономерностей разработана система дифференциальных уравнений, описывающая взаимосвязь психофизиологических параметров оператора с учетом внешних факторов, условий труда и индивидуальных характеристик. На основе проведенного анализа предложен адаптивный механизм управления автономностью системы, направленный на поддержание эффективности производственного процесса.
Разработанный математический аппарат позволяет учитывать динамику изменения состояния оператора и обеспечивает основу для оптимизации распределения производственных задач в системе «человек – кобот».
Для численного анализа и демонстрации работоспособности разработанной математической модели и адаптивного способа управления была выполнена их программная реализация в среде Python с использованием библиотеку SciPy для решения систем обыкновенных дифференциальных уравнений. Настройка базовых параметров модели осуществлялась на основе эмпирических диапазонов, представленных в исследовании [4, табл. 3], что обеспечивает их соответствие реальным психофизиологическим характеристикам человека-оператора. В работе [4] психофизиологическое состояние операторов оценивалось с применением цифровой корректурной пробы (ЦКП) и шкалы оценки усталости FAS на выборке из 10 испытуемых в течение рабочей смены. В качестве исходных данных использовались начальные значения психофизиологических показателей оператора (W(0), F(0), E(0)) и производственной нагрузки (L(0)), соответствующие началу рабочей смены. Моделирование проводилось для временного интервала, эквивалентного стандартной рабочей смене (8 ч), с дискретным шагом, обеспечивающим стабильность численного решения. Полученные данные о динамике работоспособности, утомляемости, ошибаемости оператора и уровне автономности робота были подвергнуты сравнительному анализу для оценки эффективности адаптивного механизма. Следует отметить, что данное исследование сосредоточено на теоретическом моделировании и имитационной проверке концепции.
Результаты исследования и их обсуждение
В отличие от традиционных промышленных роботов, работающих в изолированных зонах, коботы берут на себя выполнение монотонных энергозатратных и высокоточных операций, демонстрируя при этом неизменную эффективность и повторяемость.
Несмотря на делегирование части физических и рутинных операций коботу, человек-оператор остается центральным звеном и интегрирующим ядром производственного процесса. Его функции управления, контроля и принятия решений в нештатных ситуациях остаются незаменимыми. Однако именно это центральное положение оператора обуславливает и главную уязвимость гибридной системы – влияние человеческого фактора [1; 2; 5]. Согласно [6, c. 91], «около 40 % отказов различных технических систем прямо или косвенно связано с ЧФ, а 20 % – напрямую с человеком».
Критическим аспектом безопасности процессов коллаборативных систем является отсутствие адаптации к динамическому состоянию человека-оператора. Современные коботы пока что не распознают признаки нарастающего утомления, снижения когнитивных функций или эмоциональной напряженности человека, с которым работают в паре. Сохранение штатного режима функционирования кобота при ухудшении психофизиологических показателей оператора может привести к рискованным ситуациям на производстве [7].
Совместная работа с коботом формирует качественно новую структуру профессиональной нагрузки. Эргономические исследования демонстрируют, что операторы сталкиваются с комплексом неблагоприятных факторов, включая профессиональную изоляцию и ограниченность многочисленных стереотипных операций [8]. Помимо выполнения непосредственных производственных задач, от оператора требуется постоянный мониторинг движений и действий кобота, что создает условия для появления повышенной когнитивной нагрузки. Необходимость параллельного контроля технологического процесса, траекторий робота и собственной безопасности усугубляется требованием постоянной готовности к экстренному вмешательству в автоматизированное производство, что поддерживает повышенный уровень внимания на протяжении всей рабочей смены [8].
Существенной характеристикой операторской деятельности является динамический характер работоспособности. Исследования в области эргономики подтверждают, что параметры функционального состояния оператора демонстрируют значительную вариативность в течение рабочего цикла [9; 10]. В процессе трудовой деятельности наблюдаются закономерные изменения функционального состояния – от оптимальной производительности в начальный период до выраженного утомления в завершающей стадии. Кумулятивный характер накопления усталости позволяет рассматривать процесс утомления как неотъемлемый компонент операторской деятельности [11; 12]. Экспериментальные данные визуализируют кривые производительности, демонстрирующие значительное снижение работоспособности во второй половине смены, когда усиливается воздействие таких факторов, как кумулятивная усталость, монотонность операций и сенсорная депривация [9; 11; 12].
К числу наиболее значимых рисков антропогенного происхождения относятся: ухудшение качества принятия решений при прогрессирующем утомлении, увеличение времени реакции в нештатных ситуациях, ошибки прогнозирования траекторий движения кобота вследствие снижения концентрации внимания. Особую проблему представляет формирование избыточного доверия к автоматизированной системе, когда оператор начинает пренебрегать базовыми правилами безопасности, полагаясь на безотказность работы робототехники. Парадоксальным образом монотонность воздействия с коботом может вызывать сенсорную депривацию при одновременном сохранении высокого уровня психического напряжения [8; 13].
Несмотря на потенциальные преимущества рационального распределения задач между человеком и коботом, ключевой проблемой остается обеспечение адаптивного перераспределения рабочей нагрузки в режиме реального времени. Перспективные системы коллаборативной робототехники должны обладать способностью не только к выполнению части физических операций, но и к адаптации характера взаимодействия в зависимости от текущего психофизиологического состояния оператора, обеспечивая снижение когнитивной нагрузки в периоды пиковой утомляемости [1; 7; 9].
Следовательно, задача оптимального распределения нагрузки не может быть сведена лишь к функциональному разделению задач. Она требует разработки такой модели взаимодействия, которая бы не только максимизировала сильные стороны каждого участника, но и свела бы к минимуму потенциальные риски, вносимые человеческим фактором. Это предполагает создание адаптивной системы, способной в реальном времени отслеживать состояние оператора и динамически перераспределять задачи, обеспечивая тем самым устойчивость всего производственного комплекса.
Для решения поставленной задачи построен граф взаимосвязей «человек-оператор – кобот», основанный на динамике ключевых показателей взаимодействия, представленных на рис. 1.
На рис. 1 граф 1 объединяет следующие параметры: для человека – работоспособность W(t), утомляемость F(t), ошибаемость E(t), учитывается его производственная нагрузка L(t); в качестве внешнего фактора вводится взаимодействие с коботом, у которого оценивается уровень автономности S(t) на интервале [0, 1]; коэффициенты  ,
,  ,
,  отражают индивидуальные психофизиологические характеристики оператора, а коэффициент
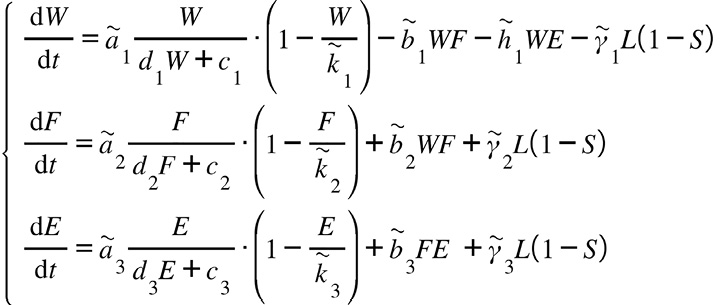
отражают индивидуальные психофизиологические характеристики оператора, а коэффициент  введен для корректировки влияния производственной нагрузки на переменные состояния человека. Представим данный граф системой дифференциальных уравнений (1) учитывающих взаимовлияние психофизиологического состояния оператора и функциональных возможностей робота-манипулятора, на основе которых авторами предложено ввести адаптивный механизм управления, реализованный через переменную уровня автономности S(t) кобота, изменяющий производственную нагрузку L(t) на человека в зависимости от его психофизиологического состояния.
введен для корректировки влияния производственной нагрузки на переменные состояния человека. Представим данный граф системой дифференциальных уравнений (1) учитывающих взаимовлияние психофизиологического состояния оператора и функциональных возможностей робота-манипулятора, на основе которых авторами предложено ввести адаптивный механизм управления, реализованный через переменную уровня автономности S(t) кобота, изменяющий производственную нагрузку L(t) на человека в зависимости от его психофизиологического состояния.
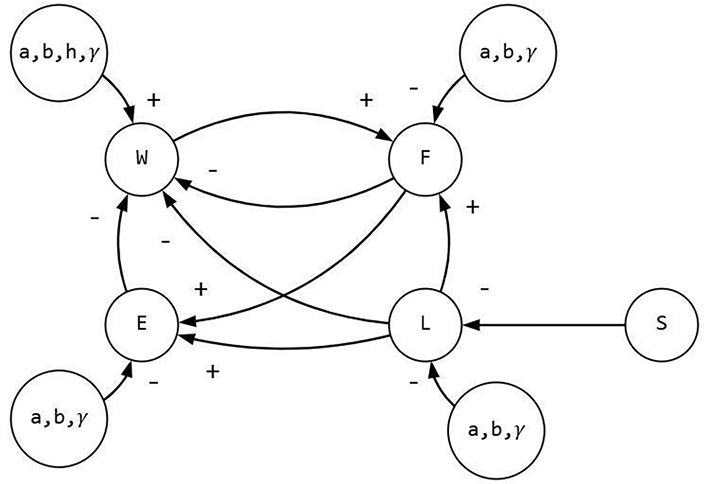
Рис. 1. Граф взаимосвязей функциональных характеристик человека-оператора и внешних факторов Примечание: составлен авторами на основе источника [5]
 (1)
(1)
В (1) параметры di, ci, ki (где i = 1, 2, 3) определяют нелинейную динамику изменения состояния оператора. Коэффициент di регулирует интенсивность изменения соответствующих показателей, определяя скорость их роста или снижение во времени. Коэффициент ci характеризует пороговые значения, при которых начинается существенное влияние на динамику функционального состояния человека, определяя индивидуальную чувствительность оператора к изменению работоспособности, утомляемости, ошибаемости. Коэффициент  определяет предельную емкость системы по каждому показателю, выполняя роль естественного ограничителя и обеспечивая эффект насыщения. Совместное действие этих коэффициентов формирует динамику психофизиологического состояния оператора в системе «человек – робот».
определяет предельную емкость системы по каждому показателю, выполняя роль естественного ограничителя и обеспечивая эффект насыщения. Совместное действие этих коэффициентов формирует динамику психофизиологического состояния оператора в системе «человек – робот».
Обратим внимание, что уровень автономности S(t) кобота динамически корректируется на основе текущих показателей оператора, что позволяет системе гибко перераспределять производственные задачи между человеком и роботом. Переменная выполняет роль управляющего элемента, определяющего степень самостоятельности робота-манипулятора. Поясним, что (1–S) количественно определяет долю производственных задач, выполняемых оператором, и определяет степень его вовлеченности в технологический процесс. При максимальной автономности (S = 1) нагрузка L практически полностью компенсируется роботом, что минимизирует влияние на психофизиологические показатели оператора. В режиме ручного управления (S = 0) оператор выполняет весь объем задач, что приводит к значительному снижению работоспособности W(t), интенсивному росту утомления F(t) и увеличению частоты ошибок E(t). В промежуточных режимах (0 < S < 1) система демонстрирует адаптивные свойства: при ухудшении состояния оператора уровень автономности повышается, что приводит к снижению доли задач оператора (1–S) и уменьшению негативного воздействия производственной нагрузки на оператора. Такой подход обеспечивает поддержание эффективности технологического процесса при одновременном учете психофизиологического состояния оператора.
Важным аспектом построения модели является интеграция данных о хронотипе оператора, который, согласно исследованию [4; 14; 15], зависит от множества внешних и внутренних факторов. Детализированная систематизация таких факторов представлена в [6, табл. 1], где наряду с индивидуальными психофизиологическими характеристиками учитываются параметры производственной среды и организационные условия труда.
Для адаптации модели к конкретным производственным условиям [16] и индивидуальным особенностям человека вводятся корректирующие коэффициенты условий труда e1, e2, ..., en и используется процедура корректировки базовых параметров модели. Таким образом, переход к скорректированным параметрам представлен в виде функций [2]:

 . (2)
. (2)
Представим математическое описание уровня автономности системы (кобота) S(t) в форме адаптивной переменной состояния, определяемой как функция от текущих показателей оператора:
 . (3)
. (3)
В выражении (3) базовая автономность системы S0 корректируется с учетом коэффициентов чувствительности: kW к снижению работоспособности, kF к росту утомления и kE к увеличению ошибок. Данная адаптивная схема позволяет системе динамически перераспределять нагрузку в зависимости от психологического состояния оператора, обеспечивая тем самым устойчивость функционирования производственного комплекса.
Для демонстрации работоспособности и практической оценки предложенной математической модели динамики системы «человек-оператор – кобот» была проведена ее программная реализация в среде Python, как описано в разделе «Материалы и методы исследования». Численное решение системы (1) выполнялось методом Рунге – Кутты 5-го порядка (реализация RK45 в функции solve_ivp библиотеки SciPy) с относительным допуском 10-6 и абсолютным допуском 10-8. Настройка параметров модели осуществлялась на основе эмпирических диапазонов, представленных в исследовании [4, табл. 3]. Значения коэффициентов  ,
,  ,
,  ,
,  , di, ci, выбирались из указанных диапазонов. Коэффициент
, di, ci, выбирались из указанных диапазонов. Коэффициент  , а также коэффициенты чувствительности kW, kF, kE, определяющие величину реакции системы на изменения состояния оператора, в уравнении (3) задавались авторами в процессе настройки модели. С целью сравнительного анализа эффективности адаптивного управления были рассмотрены два сценария функционирования системы. Первый сценарий (адаптивный) предполагал работу системы с активным управляющим механизмом; исходные условия модели задавались следующим образом: доля задач, делегированных коботу, составляла S = 30 %, что соответствовало начальной нагрузке на оператора L(t) = 70 %. Уровень автономности S(t) динамически корректировался согласно уравнению (3). Второй сценарий (неадаптивный, базовый) моделировал режим с отсутствием динамического перераспределения нагрузки: оператор выполнял полный объем задач (L(t) = 100 %) при постоянном нулевом уровне автономности кобота (S = 0 %). Результаты моделирования, отражающие динамику переменных состояния в обоих сценариях, визуализированы на рис. 2 и 3.
, а также коэффициенты чувствительности kW, kF, kE, определяющие величину реакции системы на изменения состояния оператора, в уравнении (3) задавались авторами в процессе настройки модели. С целью сравнительного анализа эффективности адаптивного управления были рассмотрены два сценария функционирования системы. Первый сценарий (адаптивный) предполагал работу системы с активным управляющим механизмом; исходные условия модели задавались следующим образом: доля задач, делегированных коботу, составляла S = 30 %, что соответствовало начальной нагрузке на оператора L(t) = 70 %. Уровень автономности S(t) динамически корректировался согласно уравнению (3). Второй сценарий (неадаптивный, базовый) моделировал режим с отсутствием динамического перераспределения нагрузки: оператор выполнял полный объем задач (L(t) = 100 %) при постоянном нулевом уровне автономности кобота (S = 0 %). Результаты моделирования, отражающие динамику переменных состояния в обоих сценариях, визуализированы на рис. 2 и 3.
Сравнительный анализ результатов имитационного моделирования позволяет оценить влияние адаптивного механизма на ключевые показатели системы. В базовом сценарии без адаптации (рис. 3) наблюдается прогнозируемый рост показателей утомляемости F(t) и ошибаемости E(t) при сохранении работоспособности W(t) на стабильном уровне.
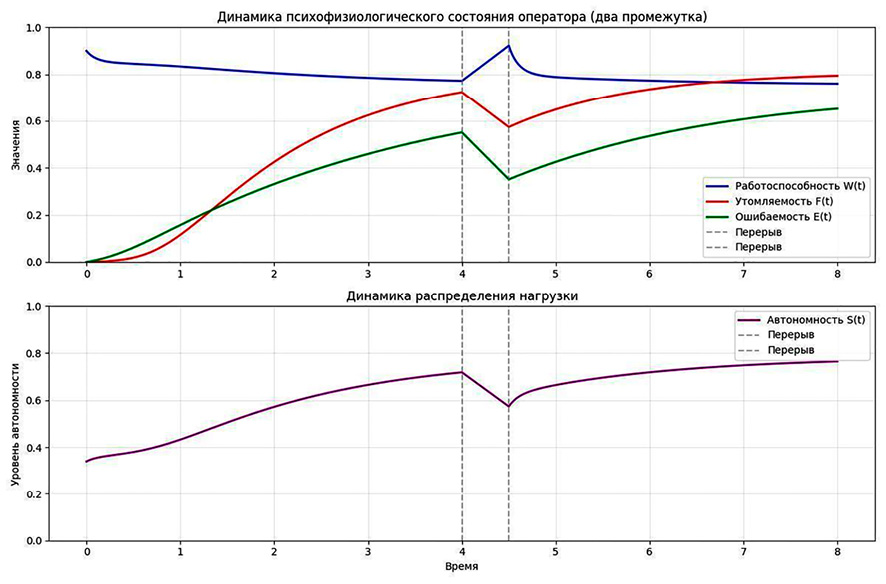
Рис. 2. Динамика показателей системы в адаптивном режиме (L = 70 %, S = 30 %) Примечание: составлен авторами по результатам данного исследования
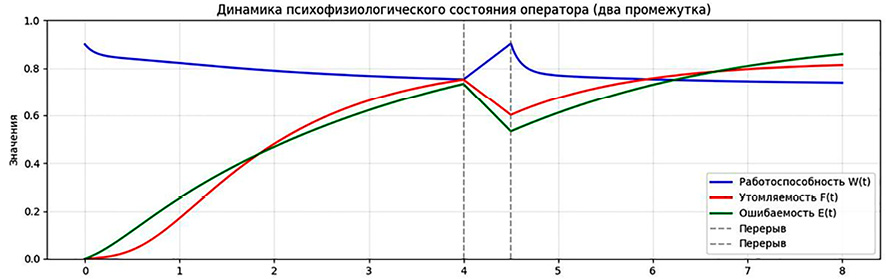
Рис. 3. Динамика показателей системы в неадаптивном режиме (L = 100 %, S = 0 %). Примечание: составлен авторами по результатам данного исследования
Данная динамика иллюстрирует классическую ситуацию, когда оператор, формально справляясь с объемом работ, подвергается кумулятивной психофизиологической нагрузке, ведущей к росту риска ошибок. При этом важно отметить, что конкретный вид кривых (интенсивности роста F(t) и E(t) при стабильности W(t)) определяется заданным в модели индивидуальным набором психофизиологических параметров оператора, задаваемых уравнением (2). Активация адаптивного механизма (рис. 2) демонстрирует его сдерживающий эффект для того же оператора (при идентичном наборе индивидуальных параметров). В ответ на рост F(t) и E(t) уровень автономности увеличивался, что обусловливало снижение доли задач, выполняемых оператором, и, как следствие, способствовало стабилизации или уменьшению темпов роста показателей утомляемости и ошибаемости.
Заключение
Разработанный авторами подход позволяет преодолеть ограничения традиционных систем с жестким распределением функций, обеспечивая переход к динамической организации взаимодействия в системе «человек-оператор – кобот», рассматривая оператора как центральное и динамически изменяющееся звено, адаптируясь к его состоянию, тем самым обеспечивая комплексный эффект: повышение общей производительности и надежности технологического процесса сопровождается снижением психофизиологической нагрузки на оператора и минимизацией количества ошибок, вызванных утомлением.
Проведенное имитационное моделирование подтвердило работоспособность разработанной математической модели и адаптивного способа управления, демонстрируя их потенциал для количественного анализа и оптимизации распределения задач в коллаборативной среде.
Дальнейшие работы будут включать комплексную экспериментальную проверку модели с участием реальных операторов для сбора эмпирических данных, уточнения параметров модели, контроля качества измерений и оценки репрезентативности выборки испытуемых для повышения достоверности и применимости предложенного решения в реальных производственных условиях.
Конфликт интересов
Финансирование
Библиографическая ссылка
Москальцов М.А., Сержантова М.В. ИССЛЕДОВАНИЕ ВОЗМОЖНОСТИ РАСПРЕДЕЛЕНИЯ НАГРУЗКИ МЕЖДУ ЧЕЛОВЕКОМ-ОПЕРАТОРОМ И РОБОТОМ-МАНИПУЛЯТОРОМ В ВЫСОКОТЕХНОЛОГИЧНОМ ПРОИЗВОДСТВЕ // Современные наукоемкие технологии. 2026. № 4. С. 85-91;URL: https://top-technologies.ru/ru/article/view?id=40732 (дата обращения: 25.06.2026).
DOI: https://doi.org/10.17513/snt.40732