



Введение
В последние годы наблюдается устойчивая тенденция к росту числа дорожно-транспортных происшествий, связанных с неудовлетворительным состоянием дорожного покрытия [1, 2]. По данным официальной статистики МВД за последние 9 лет, от 12,5 до 19,3 % всех дорожно-транспортных происшествий в Российской Федерации связаны с наличием дефектов проезжей части, таких как выбоины, трещины, просадки и разрушение кромок, что напрямую угрожает безопасности участников дорожного движения [3, 4] (рис. 1).
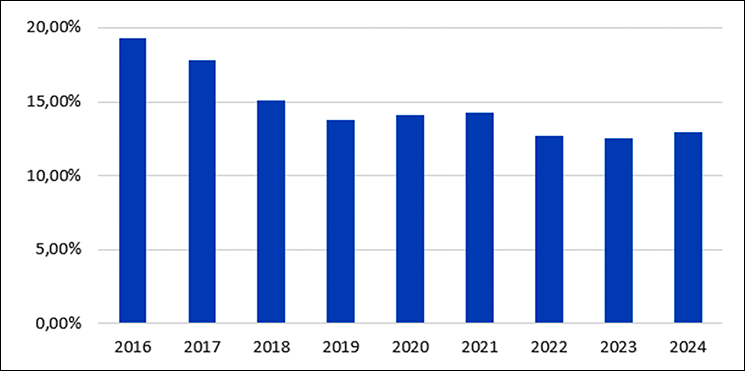
Рис. 1. Статистика ДТП, связанных с наличием дефектов проезжей части, в РФ за 2016–2024 гг. Примечание: составлен авторами на основе источников [3, 4]
Традиционный ручной мониторинг дорог субъективен, медлителен и лишен точной геопривязки, затрудняя анализ. Зарубежные системы искусственного интеллекта (ИИ) неприменимы в РФ из-за специфики климата, масштабов сети и несовместимости с ГОСТ/СП, что требует отечественного решения для автоматической детекции дефектов, их геопривязки, нормативной оценки и формирования ремонтных рекомендаций с целью повышения эффективности контроля, снижения затрат и улучшения безопасности [1, 2, 5].
Цель исследования – изучение эффективности применения интеллектуальной системы мониторинга дорожного покрытия на основе компьютерного зрения и генетического алгоритма кластеризации. Исследование направлено на оценку точности детекции дефектов, анализ производительности гибридной архитектуры и проверку соответствия автоматизированных решений требованиям нормативных документов (ГОСТ Р 50597-2017, СП 78.13330.2012).
Материал и методы исследования
Архитектура реализована как гибридное решение (микросервисы и монолитный модуль) в Kubernetes для баланса производительности и масштабируемости [6]. Микросервисы на FastAPI (с Apache Kafka) обрабатывают прием изображений, генерацию отчетов и оповещений, обеспечивая независимое масштабирование [7] (рис. 2).
Ключевой монолитный Pod (контейнерная единица в Kubernetes) объединяет ресурсоемкие операции: пространственный пересчет координат, кластеризацию дефектов генетическим алгоритмом и нормативную оценку по ГОСТ, минимизируя сетевые задержки при частом доступе к нейросети и нормативам. Для хранения данных используются: PostgreSQL с PostGIS – для геопривязанных дефектов и пространственных запросов; MinIO (S3-совместимое) – для бинарных объектов (изображения, отчеты) [8]. Kubernetes обеспечивает автоматическое масштабирование и отказоустойчивость, а гибридный подход сочетает гибкость микросервисов с эффективностью централизованной обработки пространственных зависимостей.
YOLOv12 выбрана как ядро компьютерного зрения за оптимальное соотношение точности и скорости. Модель достигла значения точности mAP = 0,912 (mean Average Precision) на валидационном наборе, собранном из изображений российских дорог, при среднем времени инференса около 33 мс на GPU RTX 6000 [9, 10]. Также, благодаря улучшенной архитектуре (PAN (Path Aggregation Network), CSP (Cross Stage Partial connections)), модель устойчива к сложным условиям (тени, мокрый асфальт, снег) [3]. Для снижения ресурсопотребления она оптимизирована через экспорт в ONNX (Open Neural Network Exchange), TensorRT и квантование (Quantization-Aware Training), сократив VRAM (Video Random Access Memory) на ~40 % без потери качества [11–13]. Интегрирована как контейнеризированный микросервис FastAPI, принимающий изображения через REST (Representational State Transfer)/Kafka и возвращающий JSON (JavaScript Object Notation) с координатами дефектов (bounding boxes), их классами и confidence для масштабируемости системы.
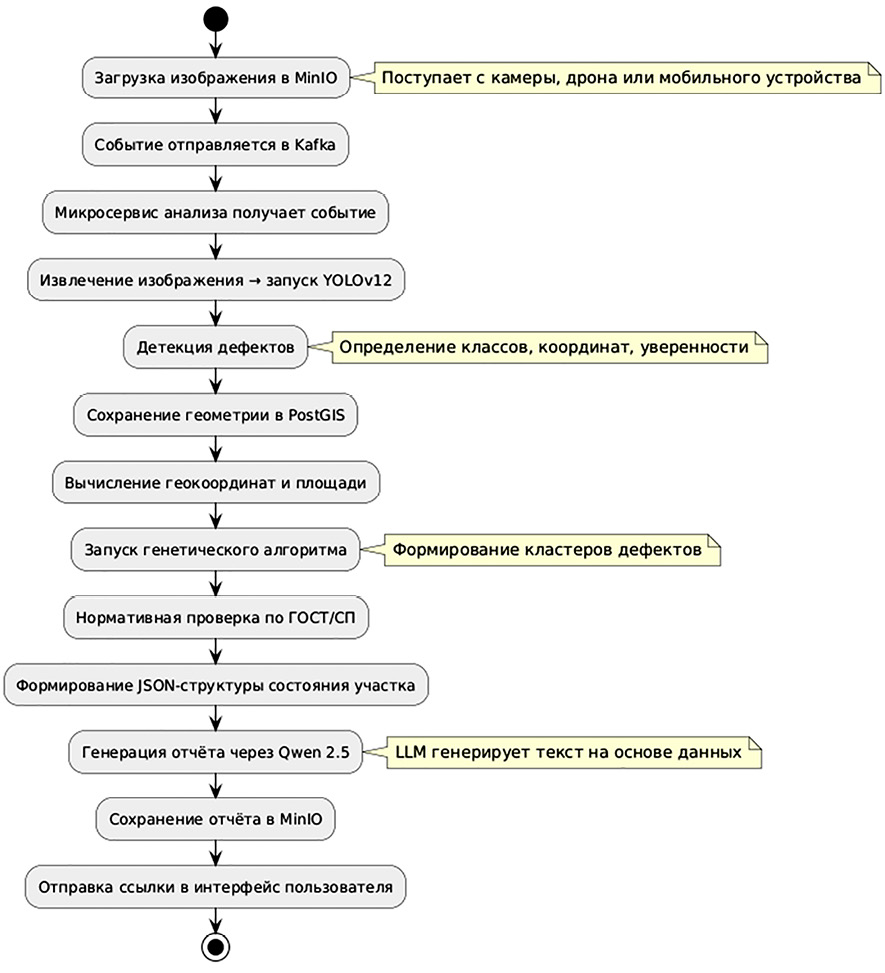
Рис. 2. Полный сценарий потока данных Примечание: составлен авторами по результатам данного исследования
Поскольку координаты дефектов после детекции представлены в пикселях и непригодны для нормативной оценки, система использует фотограмметрический модуль для пересчета в метрическую систему. На основе параметров съемки (высота, угол наклона камеры, технические характеристики) модуль строит лучевую модель, определяющую пересечение визуального луча с плоскостью дорожного покрытия, что позволяет рассчитать реальные размеры и координаты дефектов. Полученные метрические координаты в системе WGS-84 (World Geodetic System 1984) сохраняются в PostGIS как пространственные объекты типа geometry (Point, 4326), обеспечивая точную геопривязку, пространственный анализ (включая построение буферных зон и расчет расстояний) и сопоставление с нормативами ГОСТ [1].
В рамках задачи пространственного анализа дефектов дорожного покрытия в системе реализован генетический алгоритм кластеризации, который автоматически объединяет отдельные повреждения в ремонтные зоны [14, 15]. В отличие от традиционных методов, таких как k-means, разработанный подход позволяет учитывать не только расстояния между точками, но и их плотность, а также избегать слишком близкого расположения центров кластеров, что особенно важно при планировании фрагментарного и капитального ремонта [16].
Целевая функция, минимизируемая алгоритмом, учитывает два ключевых аспекта:
− внутрикластерную компактность, то есть средние расстояния между всеми парами дефектов внутри каждого кластера;
− межкластерную разделимость, то есть штраф за слишком близкое расположение центров тяжести различных кластеров.
Формула целевой функции:
 (1)
(1)
где K – количество кластеров (передается из YOLO и PostGIS), Ck – k-й кластер дефектов, |Ck| – количество дефектов в кластере, pi, pj – координаты дефектов в кластере Ck, d(pi, pj) – евклидово расстояние между дефектами i и j, μk – центр тяжести (средняя точка) кластера Ck, α – весовой коэффициент для штрафа за слишком близкие кластеры.
Первая часть функции отвечает за плотность внутри кластеров, вторая – за разделенность между ними. Это позволяет добиться компактных, но не пересекающихся зон повреждений, что критично при последующей нормативной оценке.
Алгоритм работает по классической схеме эволюционного подхода: создается популяция решений, каждая особь кодирует разбиение всех дефектов по K кластерам. На каждом поколении выполняются отбор, скрещивание и мутация, а лучшая особь сохраняется (элитизм). В качестве критерия остановки используется стабилизация значения целевой функции или достижение заданного количества поколений.
Использование данного алгоритма позволило повысить точность объединения дефектов в ремонтные участки, минимизировать ложные объединения и повысить соответствие кластеров нормативной логике ГОСТ Р 50597-2017.
После определения метрических координат и размеров дефектов модуль нормативной оценки сопоставляет их геометрические параметры с критическими порогами, установленными ГОСТ Р 50597-2017 и СП 78.13330.2012 [1, 2]. Система проверяет каждый дефект на соответствие нормативам. Превышение этих значений классифицирует дефект как недопустимый, требующий устранения. Дополнительно, согласно п.5.2 ГОСТ Р 50597-2017, система агрегирует данные на уровне участков: если на 100-метровом отрезке общая площадь дефектов превышает 5 % от площади покрытия, это служит основанием для рекомендации капитального или фрагментарного ремонта. На основе этого анализа система формирует итоговую оценку состояния покрытия и конкретные рекомендации по ремонту.
Система автоматически генерирует итоговый отчет (DOCX/PDF) на основе данных детекции, геопривязки и нормативной оценки, включая детальную информацию по каждому дефекту (тип, размеры, координаты, соответствие ГОСТ Р 50597-2017) и агрегированные рекомендации по ремонту участков (фрагментарный/капитальный со ссылками на нормативы СП 78.13330.2012) [1, 2]. Отчет дополняется наглядными схемами распределения дефектов и сводными таблицами, обеспечивая совместимость с документооборотом, а его автоматизация гарантирует точность, снижает трудозатраты и исключает субъективные ошибки.
Система мониторинга использует Prometheus и Grafana для сбора метрик (загрузка CPU/GPU, задержки) и визуализации данных в реальном времени. Логи агрегируются через ELK-стек (Elasticsearch, Logstash, Kibana), что позволяет быстро анализировать ошибки и медленные запросы. Alertmanager отправляет алерты (SMS, Telegram, e-mail) при сбоях, например при росте времени обработки или ошибках API. Это сокращает время восстановления (MTTR (mean time to recovery)) до 10 мин и помогает выявлять узкие места (перегрузку GPU, задержки в Kafka). Все это повышает надежность системы и снижает простои.
Результаты исследования и их обсуждение
Внедрение разработанной системы показало ее преимущество по сравнению с существующими решениями: в отличие от зарубежных ИИМДП (RoadAI, Pavement Condition Index System), она адаптирована к российским климатическим условиям и учитывает требования ГОСТ Р 50597-2017.
Сравнительный анализ разработанной системы с известными решениями ИИМДП
|
Критерий сравнения |
Разработанная система (МАДИ) |
Зарубежные аналоги (RoadAI, PCI Systems) |
Традиционный ручной метод |
Базовые системы CV (YOLO без оптимизации) |
|
Точность детекции (mAP) |
0,912 |
0,82–0,88 (на зарубежных датасетах) |
Субъективна, ≈ 0,70 (на основе выборочных проверок) |
0,85–0,89 (YOLOv8 на российских данных) |
|
Время обследования 1 км дороги |
20–25 мин |
30–45 мин (требуется адаптация под условия) |
≈ 240 мин (4 часа) |
30–35 мин (без интегрированного пайплайна) |
|
Нормативная оценка (ГОСТ/СП) |
Полная автоматизация |
Отсутствует / требует ручной доработки |
Ручная сверка |
Отсутствует |
|
Геопривязка дефектов |
Автоматическая, точная (фотограмметрия + PostGIS) |
Часто приблизительная (GPS-метка) |
Визуальная привязка, неточная |
Отсутствует / пиксельные координаты |
|
Кластеризация для ремонта |
Генетический алгоритм (учет плотности и разделимости) |
Простые методы (grid-based, k-means) |
Экспертная оценка «на глаз» |
Отсутствует |
|
Адаптация к условиям РФ |
Полная (тренировка на локальных данных, учет теней, осадков) |
Частичная / отсутствует |
Естественная |
Частичная (зависит от датасета) |
|
Формирование отчета |
Автоматическое (DOCX/PDF) с рекомендациями |
В основном сырые данные / дашборды |
Ручное составление |
Сырые данные (JSON, координаты) |
Проведен сравнительный анализ разработанной системы с существующими известными решениями в области ИИ-мониторинга дорожного покрытия (ИИМДП). Анализ проводился по ключевым метрикам: точность детекции, время обследования участка дороги, интеграция с нормативной базой и функциональность пространственного анализа. Результаты представлены в таблице.
Повышение точности нейросетевой модели до mAP = 0,912 по сравнению с базовыми версиями YOLO (≈ 0,87–0,89) было достигнуто за счет комплекса взаимосвязанных нижеперечисленных мер.
Модель YOLOv12 была дообучена на обширном датасете, собранном на дорогах РФ, с применением аугментаций, имитирующих сложные условия: наложение искусственных теней, симуляция мокрого и заснеженного покрытия, изменение контрастности. Это снизило количество ложных срабатываний и пропусков в реальных условиях.
Интеграция фотограмметрического модуля до этапа постобработки предсказаний позволила проводить валидацию размеров объектов не в пикселях, а в метрической системе. Это дало обратную связь для фильтрации заведомо неверных детекций (например, «трещин» физически невозможной длины или ширины), что напрямую повысило precision (точность) модели.
Использование усовершенствованных компонентов PAN (Path Aggregation Network) и CSP (Cross Stage Partial connections) улучшило поток градиентов и контекстуальное понимание сцены, повысив качество детекции мелких и частично скрытых объектов (узких трещин, краев выбоин).
Сокращение времени обследования с 4 ч до 20–25 мин на 1 км достигнуто за счет автоматизации и интеграции всех этапов в единый непрерывный пайплайн, что исключает «ручные» простои. В процессе работы устранены этапы ручного осмотра дороги, бумажного протоколирования, ручного измерения дефектов и последующего ввода данных в систему.
Процессы детекции (YOLO), геопривязки (фотограмметрия), кластеризации (генетический алгоритм) и нормативной оценки работают как единый автоматизированный конвейер в рамках гибридной архитектуры. Данные передаются между модулями без задержек на стыковку.
Заключение
Проведенное исследование подтвердило эффективность разработанного подхода к мониторингу дорожного покрытия. Основной результат – создание интеллектуальной системы, которая сочетает современные технологии компьютерного зрения и передовые алгоритмы обработки данных. Ключевое преимущество решения – достижение высокой точности обнаружения дефектов (91,2 %) благодаря использованию усовершенствованной модели YOLOv12, специально адаптированной к российским дорожным условиям. Особенность системы – применение гибридной архитектуры, где критически важные вычисления выполняются в оптимизированном монолитном модуле, а остальные задачи распределены между микросервисами. Это обеспечивает как высокую производительность, так и масштабируемость решения. Важным достижением стала разработка специализированного генетического алгоритма для пространственной кластеризации дефектов, который учитывает не только географическое расположение повреждений, но и их плотность, что существенно повышает точность формирования ремонтных зон по сравнению с традиционными методами. Система автоматически анализирует выявленные дефекты по нормативам ГОСТ и формирует обоснованные рекомендации по видам ремонта, что исключает субъективность оценок. Практическая ценность решения подтверждена значительным сокращением времени обследования (с 4 ч до 20–25 мин на 1 км дороги) и снижением затрат на мониторинг на 58–62 %. Полученные результаты демонстрируют готовность системы к интеграции в существующие процессы управления дорожной инфраструктурой и ее потенциал для повышения эффективности обслуживания дорожной сети.
Конфликт интересов
Библиографическая ссылка
Подберёзкин А.А., Борзенков А.М., Остроух А.В., Пронин Ц.Б., Тётченко О.А. ИССЛЕДОВАНИЕ ПРИМЕНЕНИЯ КОМПЬЮТЕРНОГО ЗРЕНИЯ И ГЕНЕТИЧЕСКОГО АЛГОРИТМА КЛАСТЕРИЗАЦИИ ДЛЯ МОНИТОРИНГА СОСТОЯНИЯ ДОРОЖНОГО ПОКРЫТИЯ // Современные наукоемкие технологии. 2025. № 12. С. 139-144;URL: https://top-technologies.ru/ru/article/view?id=40615 (дата обращения: 23.07.2026).
DOI: https://doi.org/10.17513/snt.40615