



Введение
В настоящее время модульные траловые механизмы, которые также называют тяжеловозные модульные трейлеры, являются единственным способом доставки крупногабаритных сверхтяжелых грузов, вес которых может достигать пятнадцати тысяч тонн. Данный механизм предназначен для транспортировки по суше таких объектов, как фюзеляжи гражданских самолетов, корабли и его модули, мосты, большие цистерны, нефтяные платформы, дома в сборе, статоры генераторов электростанций. Модульный принцип построения дает возможность составлять из полуприцепов автопоезда, которые позволяют равномерно распределить нагрузку по всему транспортному устройству. Управление модульным траловым механизмом осуществляется с помощью дистанционного пульта оператора. С помощью дистанционного пульта оператор в ручном режиме осуществляет регулировку положений гидропривода и группы гидроприводов, направление движения, а также получает информацию о нагрузке, действующей на оси трала. Комплексные электронные системы, находящиеся на платформе, по большей части являются мониторинговыми, и решение об изменении положения гидроприводов на основе показания с датчиков остается за оператором. Из-за несовершенства системы, основанной на классических методах управления, нередки случаи, когда транспортируемый груз опрокидывался, что приводило к повреждению самого перевозимого объекта, наносило непоправимый ущерб модульному траловому механизму, разрушало дорожное полотно [1; 2]. В связи с перечисленными факторами применение интеллектуальных методов управления может позволить снизить влияние негативных факторов, действующих на объект управления. В работе изложены результаты исследования по применению многокаскадного нечеткого логического регулятора для управления модульным траловым механизмом за счет суммирования синтезированных сигналов управления нечеткими модулями различного уровня вложенности.
Цель исследования заключается в синтезе многокаскадного нечеткого логического регулятора для управления модульным траловым механизмом, позволяющим стабилизировать положение груза при возникновении продольных и поперечных отклонений, а также неровность дорожного покрытия.
Материалы и методы исследования
В связи с особенностями транспортировки крупногабаритных сверхтяжелых грузов конфигурация платформ и общее количество гидроприводов в них может различаться в зависимости от веса и габаритов перемещаемого объекта [3, c. 176].
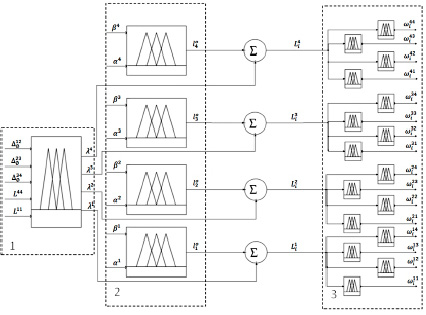
Рис. 1. Функциональная схема компоновки модулей многокаскадного нечеткого логического регулятора: 1 – внешний каскад нечеткого регулятора, отслеживающий рассогласование между платформами и крайними элементами активной подвески; 2 – вложенный каскад 1-го уровня, отслеживающий положение по оси абсцисс и ординат для каждой платформы; 3 – вложенный каскад 2-го уровня, управляющий положением гидроприводов активной подвески
Поэтому интеллектуальная система должна обеспечивать возможность управления стабилизацией объекта с различным количеством гидроприводов. Иерархическое построение нечетких логических регуляторов позволяет осуществлять предиктивную корректировку регулирующего воздействия [4; 5].
Обобщенная функциональная схема нечеткого логического регулятора, организованная по многокаскадному принципу для стабилизации транспортной платформы, представлена на рис. 1.
Работу многокаскадного нечеткого логического регулятора можно формализовать следующим образом: все нечеткие модули настраиваются на нечеткий алгоритм вывода Такаги – Сугено нулевого порядка. Входные нечеткие переменные у каждого регулятора описываются как аппроксимированные функции принадлежности треугольной формы. Для устранения недостатка информации, связанной с отклонением крайних точек состава трала при компенсации подъемов или спуска в интеллектуальную систему, вводятся сигналы передней крайней точки и задней крайней точки активных элементов подвески, а также горизонтальное положение полуплатформ относительно друг друга [6]. Априорный недостаток информации обрабатывается многокаскадным нечетким логическим регулятором для выведения всей системы в единое горизонтальное положение.
В общем виде степени истинности для предпосылок каждого правила нечеткого регулятора верхнего уровня формализуется следующим образом:
 ,
,
где  ,
,  ,
,  – величины отклонений между платформами; L44, L11 – сигналы с датчиков положения крайних гидроприводов; A, B, C, D, E – входные функции принадлежности треугольной формы; i – номер правила в базе знаний (i = 1…N1);
– величины отклонений между платформами; L44, L11 – сигналы с датчиков положения крайних гидроприводов; A, B, C, D, E – входные функции принадлежности треугольной формы; i – номер правила в базе знаний (i = 1…N1);
На основе операции минимума определим уровни отсечения каждой нечеткой переменной для каждого нечеткого правила:

Тогда значения выходной переменной, с учетом принятой базы правил, для регулятора верхнего уровня можно вычислить по формуле среднего взвешенного:
 ,
,
где j – количество выходов регулятора; ci – выходные константы.
Степени принадлежности для базы знаний НЛР внутреннего каскада, отслеживающие положение по оси абсцисс и ординат для каждой платформы, описывается следующим образом:
 ,
,
где g – номер правила в базе знаний регулятора второго уровня (g = 1…N2);  – текущий угол отклонения от нормали по оси абсцисс “k”-й полуплатформы;
– текущий угол отклонения от нормали по оси абсцисс “k”-й полуплатформы;  – текущий угол отклонения от нормали по оси ординат “k”-й полуплатформы.
– текущий угол отклонения от нормали по оси ординат “k”-й полуплатформы.
Аналогично, как и у регулятора верхнего уровня с помощью операции минимума определим уровни отсечения каждой нечеткой переменной для каждого нечеткого правила:
Значения выходной переменной, с учетом принятой базы правил, для регулятора внутреннего каскада можно вычислить по формуле среднего взвешенного:
 ,
,
где o – количество выходов регулятора второго уровня; v – номер полуплатформы; sg – выходные константы.
Управляющий сигнал для элементов внутреннего каскада низшего уровня управляющие положением гидроприводов можно получить по формуле

На основе полученного сигнала управления регулятор нижнего уровня можно описать следующим образом:
где r – номер правила в базе нижнего уровня (r = 1…N3); H – функции принадлежности; σr – выходные константы.
Таким образом, итоговое значение управляющего воздействия формируемым многокаскадным нечетким логическим регулятором представляет собой сумму значений выходов вложенного каскада на каждый элемент активной подвески каждой полуплатформы [7].
При проектировании и моделировании системы управления были приняты следующие допущения:
− гидравлическая жидкость системы ISO VG 32(ESSO UNIVIS N32);
− конструктивно трал состоит из четырех полуплатформ, каждая из которых опирается на четыре гидравлических привода с датчиками линейного перемещения;
− каждая полуплатформа представляет собой абсолютно жесткую пластину, не подвергающуюся скручиваниям и изгибам;
− целостность и твердость шин является абсолютной;
− расстояния между соседними платформами (зазоры) настолько малы, что ими можно пренебречь.
Для стабилизации транспортного трала, состоящего из четырехсекционной транспортной платформы на одном уровне в условиях изменения наклона дорожного полотна, были рассчитаны все ограничения, накладываемые на систему для ее корректной эксплуатации.
Задача системы управления, реализованной в нечетком логическом регуляторе, формирующем уставки внутренних модулей за счет суммирования значений сигналов управления, заключается в удержании всех четырех полуплатформ на одном уровне таким образом, чтобы при движении по дороге, имеющей наклон, не образовывалось вертикального смещения платформ относительно друг друга (рис. 2).
На основе принятых ранее допущений рассматриваемая модель трала состоит из четырех полуплатформ с четырьмя активными элементами подвески в каждой (рис. 2).
Максимальный угол наклона дорожного полотна достигается при условии, что гидроцилиндры 11 и 12 полностью втянуты, а гидроцилиндры 43 и 44 полностью выпущены. Исходя из математического расчета, максимальный допустимый угол наклона дорожного полотна не должен превышать 2,23º.
При движении секции, состоящей из нескольких полуплатформ по наклонной поверхности, неизбежно образуется вертикальное отклонение относительно друг друга. Для создания системы управления на базе внешнего нечеткого логического регулятора, которая позволит стабилизировать платформы, была сформирована продукционная база правил состоящая из 29 правил. Для этого были рассмотрены различные возможные варианты положения полуплатформ, в количестве тридцати двух ситуаций, во время движения по дорожному полотну без наклона, с наклоном в подъем и с наклоном на спуске. На рис. 3 представлена структурная схема гидравлической системы многоопорной транспортной машины состоящих из 4 полуплатформ с внешним нечетким логическим регулятором, формирующим уставки внутренних модулей за счет суммирования значений сигналов управления.
На рис. 4 представлены графики сигналов задания, поступающих на внешний нечеткий регулятор, имитирующих отклонения между платформами, и линейное положение крайних гидроприводов на концах составного модульного трала 44 и 11.
В момент времени с 1 до 6,75 с (зона I), на вход нечеткого логического регулятора поступают сигналы с датчиков положения гидроцилиндров 11 и 44 об одновременном втягивании этих гидроцилиндров, при этом сигналы с датчиков 1–2, 2–3 и 3–4 равны нулю, что соответствует отсутствию наклона между полуплатформами.
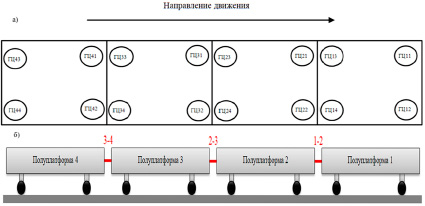
Рис. 2. Модульный траловый механизм: а) функциональная схема гидравлической системы трала при виде сверху; б) главный вид положения платформ при движении по ровной поверхности.
Рис. 3. Структурная схема гидравлической системы четырех полуплатформ с нечетким логическим регулятором, формирующим уставки внутренних модулей за счет суммирования значений сигналов управления
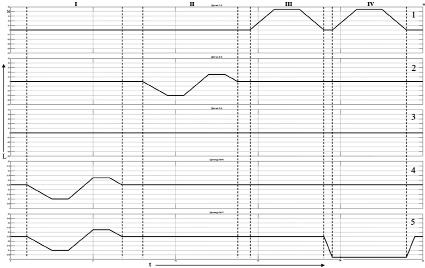
Рис. 4. Графики сигналов задания входных параметров, поступающих в нечеткий логический регулятор: 1 – отклонение между платформами 1 и 2; 2 – отклонение между платформами 2 и 3; 3 – отклонение между платформами 3 и 4; 4 и 5 – положение гидроприводов
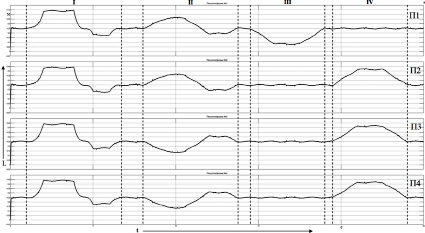
Рис. 5. Графики переходных процессов в гидроприводах при подаче на систему возмущающего воздействия в виде синусоидального сигнала с белым шумом
На основании входных значений НЛР формирует управляющий сигнал в соответствии с определенным правилом – выдвинуть все гидроцилиндры четырех полуплатформ, позволяющий скорректировать положение трала (рис. 5).
Через некоторое время сигналы с датчиков положения гидроцилиндров 11 и 44 меняются на противоположные, что означает о выдвижении гидроцилиндров. Реагируя на это, НЛР формирует управляющий сигнал в соответствии с заданным правилом – втянуть все гидроцилиндры четырех полуплатформ, позволяющий скорректировать положение трала.
В момент времени с 8 до 13,75 с (зона II), на вход НЛР поступает сигнал с датчика 2–3 положения полуплатформ № 2 и № 3, при этом сигналы с датчиков 1–2 и 3–4 равны нулю. Гидроцилиндры 11 и 44 находятся в среднем положении. Данный сигнал соответствует положению, когда полуплатформы № 1 и № 2 располагаются на одном уровне и одновременно выше уровня полуплатформ № 3 и № 4, полуплатформы № 3 и № 4 располагаются на одном уровне. На основании входных значений НЛР формирует управляющий сигнал в соответствии с правилом – выдвинуть все штоки полуплатформ № 1 и № 2 и втянуть все штоки полуплатформ № 3 и № 4, позволяющий скорректировать положение трала. Через некоторое время сигнал с датчика 2–3 положения полуплатформ № 2 и № 3 меняется на противоположный, что соответствует положению, когда полуплатформы № 1 и № 2 располагаются на одном уровне и одновременно выше уровня полуплатформ № 3 и № 4, полуплатформы № 3 и № 4 располагаются на одном уровне. Реагируя на входные значения, НЛР формирует управляющий сигнал в соответствии с правилом – втянуть все штоки полуплатформ № 1 и № 2 и выдвинуть все штоки полуплатформ № 3 и № 4, позволяющий скорректировать положение трала (рис. 5).
В момент времени с 14,5 до 19 с (зона III), на вход к НЛР поступает сигнал с датчика 1–2 положения полуплатформ № 1 и № 2 , при этом сигналы с датчиков 2–3 и 3–4 равны нулю. Гидроцилиндры 11 и 44 находятся в среднем положении. Данный сигнал соответствует положению, когда полуплатформа № 1 выше уровня остальных полуплатформ, полуплатформы № 2, 3 и 4 располагаются на одном уровне. Реагируя на входные значения, НЛР формирует управляющий сигнал в соответствии с правилом – втянуть все штоки полуплатформы № 1, не изменять положение гидроцилиндров полуплатформ № 2, 3 и 4, позволяющий скорректировать положение трала (рис. 5).
В момент времени с 19,5 до 24 с (зона IV), на вход к НЛР поступает сигнал с датчика 1–2 положения полуплатформ № 1 и № 2, при этом сигналы с датчиков 2–3 и 3–4 равны нулю. Гидроцилиндр 44 находится в среднем положении, гидроцилиндр 11 выдвинут практически на упор. Данный сигнал соответствует положению, когда полуплатформа № 1 выше уровня остальных полуплатформ, полуплатформы № 2, 3 и 4 располагаются на одном уровне, но так как гидроцилиндр 11 выдвигаться более не может, то использование правила невозможно. Реагируя на входные значения, НЛР формирует управляющий сигнал в соответствии с правилом – все штоки полуплатформ № 2, 3 и 4 втянуть, не изменять положение гидроцилиндров полуплатформы № 1, позволяющих скорректировать положение трала (рис. 5).
Заключение
В итоге исследования переходных процессов в гидроприводах модульного тралового механизма сделан вывод, что простроенный по иерархическому принципу нечеткий логический регулятор с применением оператора суммы позволяет компенсировать линейное рассогласование между платформами с помощью каскада внешнего путем синтеза управляющего воздействия на модули внутреннего каскада. В свою очередь, модули внутреннего каскада, реализующие стабилизацию платформы в продольном и поперечном направлении, проявляют адаптивные свойства к внешним возмущающим факторам, таким как неровность дорожного покрытия, представленного в виде синусоиды.
Библиографическая ссылка
Черный С.П., Хрульков В.Н., Мокрицкий Б.Я. МОДЕЛИРОВАНИЕ МНОГОКАСКАДНОГО НЕЧЕТКОГО ЛОГИЧЕСКОГО РЕГУЛЯТОРА ДЛЯ СТАБИЛИЗАЦИИ МОДУЛЬНОГО ТРАЛОВОГО МЕХАНИЗМА // Современные наукоемкие технологии. 2024. № 11. С. 126-132;URL: https://top-technologies.ru/ru/article/view?id=40218 (дата обращения: 01.08.2026).
DOI: https://doi.org/10.17513/snt.40218