



Проблемы взаимодействия оператора и сложных технологических систем в условиях возрастающей интеллектуальной мощи последних являются одними из важнейших проблем современной эргономики [1].
В литературе описано явление техномодификации психики – перестройки когнитивных моделей взаимодействия человека с объектами естественного и искусственного мира, взаимодействия с искусственным интеллектом и техносферой [2].
Искусственный интеллект обладает сегодня возможностями, значительно превосходящими когнитивные возможности человека. Это определило широкое использование систем поддержки принятия решений (СППР) в самых различных отраслях: сельском хозяйстве [3], автоматизированных системах управления военного назначения [4], при разработке месторождений полезных ископаемых [5].
Наибольшую сложность в этих условиях представляет процедура интеллектуального симбиоза решения, принятого интеллектуальной системой, и решения, принятого оператором [6; 7]. Концепция симбиоза естественного и искусственного интеллекта представлена в так называемых гибридных интеллектуальных системах [8]. Вместе с этим известна проблема предвзятости искусственного интеллекта [9]. В системах, в которых решающее право голоса отводится человеку, известна проблема доверия между человеком и искусственным интеллектом [10]. Так, установлено, что люди более склонны доверять когнитивным агентам, нежели другим людям. При этом, если возникает подозрение в злонамеренности действий когнитивного агента, большую враждебность и недоверие люди испытывают именно к человекоподобным роботам, чем к машинам [11].
В связи с этим проблема повышения доверия человека-оператора искусственному интеллекту и интеллектуальным системам поддержки принятия решений является важной и актуальной задачей, определяющей в ближайшее время главный тренд промышленной автоматизации.
Целью статьи является разработка концепции взаимодействия человека-оператора и технической системы поддержки принятия решений.
Научная новизна предложенного подхода заключается в использовании интеллектуального ассистента, реализующего идеологию «мягкого» бесконфликтного управления, основанную на прогнозировании действий человека-оператора в контуре управления и повышении уровня доверительности между машиной и человеком.
Теоретическое обоснование
Решение проблемы повышения уровня взаимодействия человека и технологической системы во многом лежит в области инженерной психологии и эргатики. При принятии решений человек-оператор получает сигналы внешнего мира и, на основе сформированных в процессе обучения и предыдущего опыта концептуальных моделей, формирует моторную программу управления.
В этих условиях ошибочные действия могут быть на всех трех уровнях операторского реагирования: сенсорном, когнитивном и моторном. С помощью системы поддержки операторской деятельности – интеллектуального ассистента можно снизить количество ошибочных решений на каждом уровне (рис. 1).
Так как изменений технической системы не предполагается, то считаем, что информация, получаемая оператором от технической системы, уже прошла агрегирование на своем уровне и является условно достаточной для принятия решений.
Информацию, с которой сталкивается оператор в процессе своей профессиональной деятельности, можно условно разделить на 4 вида, которые представлены в таблице.
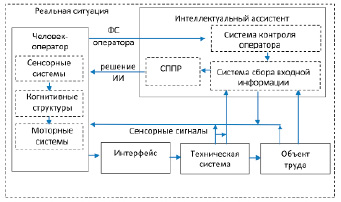
Рис. 1. Модель человеко-машинного взаимодействия с участием интеллектуального ассистента
Виды информации и необходимость реагирования на нее
|
Виды информации |
Необходимость реакции ЛПР |
Уровень важности |
Необходимость реакции ИИ |
|
Штатная |
не требуется реакция |
наименьший |
не требуется |
|
Ситуационная |
не требует обязательной реакции ЛПР |
выше среднего |
может требоваться в качестве альтернативы |
|
Критическая |
требует незамедлительной реакции |
наивысший |
требуется в особой форме представления |
|
Заблаговременная |
требует отложенной реакции ЛПР |
средний |
требуется обязательно |
Как следует из таблицы, в зависимости от важности и типа информации может понадобиться участие искусственного интеллекта в принятии решений.
Считаем, что при принятии решения человек-оператор опирается на входную информацию и выносит решение на уровне логического (понимание структуры процесса, внутренних взаимосвязей, причинно-следственных связей) и иррационального мышления (интуитивное восприятие). Оба типа мышления находятся в обратной зависимости друг от друга, то есть при повышении активности мышления одного типа – другой тип мышления затормаживается.
Решение, предлагаемое искусственным интеллектом, является альтернативным решением, предлагаемым человеку-оператору в качестве пространства возможностей.
При этом процедура принятия конечного решения оператором зависит:
- от уровня субъективного доверия оператора к самому себе (субъективной оценке своего функционального состояния, субъективной оценке своих возможностей и способностей);
- уровня доверия к технической системе (достоверности информационных сигналов, соответствия заявленным характеристикам и режимам работы);
- уровня доверия к искусственному интеллекту, реализованному в интеллектуальном ассистенте.
В свою очередь, интеллектуальный ассистент также должен обладать рядом характеристик:
- иметь полный объем входной информации, которым обладает оператор, принимающий решение;
- иметь информацию о текущем психофизиологическом состоянии оператора для оценки адекватности его действий;
- учитывать модель состояния оператора для прогнозирования действий последнего в различных условиях;
- обладать большим набором входной информации для повышения точности принимаемых решений;
- обладать гибкостью в части реализации функции дружелюбности и настойчивости по отношению к ЛПР.
Помимо вышеперечисленных, ИИ, конечно, должен обладать и иными характеристиками, определяющими качество принятия решения, например в части обеспечения репрезентативности выборок исходных данных.
Принято считать, что для принятия правильного решения лицо, принимающее решение (ЛПР), в качестве которого выступает оператор, должно обладать:
- максимально возможным объемом входной информации и наработанными программами сенсорного реагирования;
- верифицированными когнитивными моделями формирования концептуального системного описания текущей ситуации, генерации альтернатив действия и их сравнения с учетом целеполагания;
- наработанными программами моторного реагирования.
Интеллектуальный ассистент в этих условиях может обеспечить интеллектуальную поддержку оператора на каждом уровне операторского реагирования, как показано на рисунке 2.
Так, в случае если результаты управления, демонстрируемые оператором, являются неудовлетворительными по мнению ИИ, выступающего в роли внешнего контролера, (запоздалое реагирование, неадекватные результаты управления), включается интеллектуальный ассистент.
Самого оператора и интеллектуального ассистента можно рассматривать в виде агентов организационной системы, а их взаимодействие – в виде игры. Под игрой понимаем взаимодействие двух сторон, интересы которых не совпадают. Это обусловлено тем, что интересы интеллектуального ассистента можно определить, как повышение качества управления объектом. Такая же задача возлагается и на оператора, но в действительности интересы оператора отличаются от поставленной задачи в силу сложности самого оператора, как биологической и социальной системы.

Рис. 2. Интеллектуальная поддержка операторской деятельности
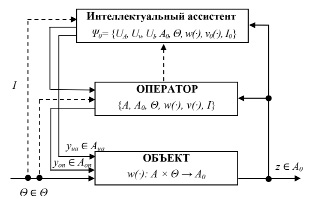
Рис. 3. Модель взаимодействия оператора и интеллектуального ассистента
В соответствии с моделью принятия решений Губко М.В. и Новикова Д.А. [12, с. 17], управление формируется в соответствии с выбираемыми стратегиями: UA – институциональное (жесткое) управление, UV – мотивационное управление, UI – информационное управление. Информационное управление является наиболее «мягким» типом управления и предполагает, что внешний центр управления воздействует на представления агента о параметрах других участников организационной системы. По мнению исследователей, информационное управление является наименее исследованным типом управления.
Модель рационального выбора достаточно подробно описана в работах Новикова Д.А. с соавторами, поэтому представим лишь отличительные моменты от ранее им разработанной структуры и комментарии.
Главным отличием предлагаемой модели принятия решений является наличие связи между оператором и интеллектуальным ассистентом (рис. 3).
В качестве условных обозначений приняты в основном обозначения из цитируемой работы, дабы обеспечить преемственность исследования: {UA, UV, UI} – вектор управления, A – возможные результаты управления, Θ – множество значений обстановки Ѳ, w(⸱) – закон изменения результата деятельности от управляющих действий y и обстановки, v(⸱) – предпочтения центра (функция полезности), I – информация, y – действие, z – результат деятельности оператора. Нижний индекс 0 определяет переменные, выбираемые центром.
В этих условиях человек-оператор на каждом этапе своей профессиональной деятельности выбирает некоторое действие yоп из множества допустимых действий A (yоп ∈ Aоп) в соответствии с собственной системой предпочтений  . Выбор конкретного действия yоп ∈ Aоп осуществляется оператором в соответствии с законом WI (⸱) изменения результата деятельности в зависимости от действия и внешней I обстановки. На основании правил индивидуального рационального выбора
. Выбор конкретного действия yоп ∈ Aоп осуществляется оператором в соответствии с законом WI (⸱) изменения результата деятельности в зависимости от действия и внешней I обстановки. На основании правил индивидуального рационального выбора  оператор формирует предпочтительное действие.
оператор формирует предпочтительное действие.
Все допустимые действия по управлению объектом можно представить в виде A = Aоп ⋃ Aиа, где Aиа – множество допустимых действий интеллектуального ассистента. Предпочтения оператора представим функцией полезности v (⸱), при этом результат деятельности оператора z ∈ A0 будет зависеть от действия y ∈ A и обстановки Ѳ ∈ Θ: z = w (y, Ѳ). Тогда закон WI (⸱) определяется функцией w (⸱), отражающей структуру пассивного управляемого объекта, и той информацией I, которой обладает агент на момент принятия решений о выбираемом действии.
Результат деятельности управления – z, где z ∈ A0, а A0 – множество допустимых результатов действия. При этом результат действия не всегда совпадает с самим действием оператора в силу сложности самой системы, влияния внутренних и внешних факторов среды, а также вмешательства в управление интеллектуального ассистента.
Интеллектуальный ассистент в этих условиях формирует свое предпочтительное действие аналогично оператору в соответствии с собственными правилами рационального выбора в зависимости от результата управления и состояния оператора.
Заключение
Концепция человеко-машинного взаимодействия, коллаборативного управления, коллаборативного интеллектуального проектирования и взаимодействия сегодня достаточно активно обсуждается. Это обусловлено, прежде всего, стремительным ростом возможностей искусственного интеллекта.
Использование современных интеллектуальных методов при проектировании сложных технических систем позволяет значительно расширить класс решаемых задач, характерных для САПР, в условиях неполной и слабо формализованной информации. Интеллектуальная поддержка принятия решений позволяет получить системный эффект и обеспечить научную основу для интеграции систем автоматизированного проектирования и систем принятия решений для обозначенной в работе проблемы человеко-ориентированного проектирования сложных технических систем.
С другой стороны, возможности человека по большей части остаются ограниченными и неизменными. Так, например, ограничения в части обработки информации не позволяют обеспечить оператору рефлексию более чем третьего уровня. Практически и экспериментально установлено, что увеличение объема входной информации в глубину структуры информированности с определенного уровня не дает выигрыша в части принятия решений и качества управления. Вместе с этим наблюдается техномодификация когнитивных структур человека, последствия которой сегодня оценить невозможно.
В текущих условиях, на наш взгляд, интерес представляет решение классической задачи распределения функций между человеком и машиной в контексте снижения конкурентности между агентами и повышения доверия оператора к системам искусственного интеллекта.
Кроме того, следует проверить гипотезу о зависимости доверия оператора к интеллектуальному ассистенту от его возраста и профессиональных компетенций.
Библиографическая ссылка
Стешина Л.А., Петухов И.В. КОНЦЕПЦИЯ ЧЕЛОВЕКО-ОРИЕНТИРОВАННОГО ПРОЕКТИРОВАНИЯ СЛОЖНЫХ ТЕХНИЧЕСКИХ СИСТЕМ // Современные наукоемкие технологии. 2023. № 7. С. 92-96;URL: https://top-technologies.ru/ru/article/view?id=39700 (дата обращения: 18.07.2026).
DOI: https://doi.org/10.17513/snt.39700