



Хотя в настоящее время перебои подачи централизованного электричества в городах и поселениях становятся редкостью, но необходимость в мини-электростанциях мощностью 10-20 кВт остается насущной и на сегодняшний день, в частности для постоянного и резервного электроснабжения медицинских и учебных учреждений, промышленных объектов и др. Большинство мини-электростанций работают на дизельном топливе с использованием наиболее распространенных в нашей стране двигателей минского машиностроительного завода Д-242, Д-243 и Д-245.
Одним из путей снижения расходов при эксплуатации мини-электростанций является замена используемого топлива на аналог, имеющий более низкую ценовую категорию. Таким топливом в нашей стране являются растительные масла [1; 2] и природный газ [3], использование которых, кроме экономии средств предприятий, позволит улучшить экологию окружающей среды путем сокращения вредных выбросов в атмосферу в процессе выработки электроэнергии. В настоящее время на рынке предлагается целый ряд систем автоматического управления (САУ), позволяющих перейти с дизельного топлива на газодизельное. Так, для линейки двигателей Д-242, Д-243, Д-245 компанией ООО «ППП Дизельавтоматика» (г. Саратов) разработана САУ СУДМ.03, которая может эксплуатироваться как в чисто дизельном режиме, так и в смешанном – газодизельном [4-6].
Вторым способом снижения расходов при эксплуатации мини-электростанций является модернизация системы автоматического управления частотой вращения двигателя (ЧВ). Параметры частоты вращения коленчатого вала двигателя энергетических установок регулируются ГОСТ 55231-2012, в котором регламентирован класс точности системы автоматического регулирования ЧВ коленчатого вала. Применение газомоторного топлива также повышает экологичность двигателя внутреннего сгорания в соответствии с экологическими нормами стандарта «Евро» ГОСТ 41.49-2003.
Для автоматического регулирования частоты вращения коленчатого вала до настоящего времени в основном применяются ПИД-регуляторы, основным конструктивным недостатком которых является жесткая взаимосвязь между временем переходного процесса и перерегулированием при смене нагрузочно-скоростного режима, что приводит к ухудшению точности регулирования при увеличении быстродействия САУ. Для решения данной проблемы предлагается применять дробный ПИД-регулятор [7-9], основанный на рекуррентных алгоритмах дробного интегрирования и дифференцирования [10-12].
Целью данной работы является модернизация САУ СУДМ.03 путем замены алгоритма ПИД-регулятора на дробный ПИД-регулятор, проведенная на базе лабораторной энергетической установки с двигателем Д-242, и настройки его оптимальной работы с помощью известных методов [13-15]. Проведенные исследования показали, что применение дробного ПИД-регулятора позволяет решить проблему взаимозависимости времени переходного процесса и заброса частоты.
Материалы и методы исследования
Исследования проводились на базе межотраслевой лаборатории «Газомоторное и водородное топливо» Самарского государственного университета путей сообщения. Дизельный электрогенератор на базе двигателя Д-242 был оборудован системой автоматического управления СУДМ.03, которая даёт возможность использовать газомоторное топливо (рис. 1).
На базе газодизельной установки был проведен ряд испытаний с целью определения зависимости частоты вращения коленчатого вала (выход) от мгновенного расхода топлива (вход), при этом все остальные настройки двигателя и генератора во время испытаний полагались неизменными. Регистрация переходных процессов двигателя производилась на всем диапазоне от начальной частоты вращения 700 об./мин. до конечной частоты вращения 1000 об./мин. на уставках частоты вращения коленчатого вала, рекомендованных специалистами лаборатории «Газомоторное и водородное топливо», а именно 770, 794, 843, 868, 893, 917, 942, 966 об./мин. Для указанных значений уставок фиксировались частота вращения коленчатого вала и расход горючей смеси.

Рис. 1. Подача газа в газодизельную установку на базе двигателя Д-242
Полученные результаты исследования экспериментальных данных не противоречат теории и практике работы двигателя внутреннего сгорания. Статистическая обработка полученных экспериментальных данных по частоте вращения коленчатого вала позволяет сделать следующие выводы:
1) отклонение от заданной частоты оборотов двигателя составляет 0,08% на приведенных выше уставках двигателя;
2) с увеличением числа оборотов с 770 до 966 об./мин. величина дисперсии уменьшается на 88%, величина среднеквадратичного отклонения уменьшается на 67%.
Можно отметить, что расход топлива снижается с каждым повышением числа оборотов двигателя, причем средний расход топлива на высоких оборотах на 16% меньше расхода топлива при оборотах на холостом ходу. Колебание топливной рейки при изменении частоты оборотов от минимальных до максимальных снижается на 63%. Также в результате обработки данных выявлено, что отклонение частоты оборотов коленчатого вала двигателя и расхода топлива подчиняется нормальному закону распределения.
Математическая модель лабораторной установки в виде передаточной функции для разных частот по экспериментальным данным была построена в пакете System Identification ПО Matlab. Предварительно для уверенной идентификации было проведено сглаживание данных алгоритмом скользящего среднего, так как экспериментальные данные обладают большими шумами. Переходная функция электрогенератора для частоты 868 об./мин. имеет вид:

Она была найдена с использованием функции tfest пакета Matlab на заданной временной области и дает погрешность в 30,11% в сравнении с реальными данными. Согласно критерию Акаике ошибка составляет FPE = 0,1453, а средняя квадратичная оценка MSE = 0,1452, что является хорошим результатом при наличии шума в исходных данных. Переходная характеристика модели приведена на рисунке 2.
Для определения оптимальных настроек дробного ПИД-регулятора разработана модель газодизельной установки в пакете Simulink ПО Matlab (рис. 3) на основе передаточной функции (1). Уникальность модели газодизельной установки заключается в одновременном проведении моделирования двух процессов с ПИД-регулятором и дробным ПИД-регулятором, что позволяет контролировать процесс подбора настроечных параметров обоих регуляторов за счёт вычисления в модели следующих качественных показателей переходного процесса: выброс частоты вращения коленчатого вала над целевым значением (Δw, %), время управления (ty), время переходного процесса (tp), интегральная оценка качества (I0), статическая ошибка (Δε), установившееся значение переходного процесса (h(∞)). Величина η показывает, на сколько % интегральная оценка I0 дробного ПИД-регулятора лучше по сравнению с обычным.
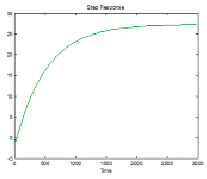
Рис. 2. Переходная характеристика модели двигателя электрогенератора
В ходе проведенных исследований на модели газодизельной установки получены переходные характеристики с оптимальными настройками дробного ПИД и ПИД-регуляторов, влияние показателей α и β дробного ПИД-регулятора на переходный процесс показано на рисунке 4. Значения качественных показателей, полученные в результате эксперимента, приведены в таблице 1. Анализ данных таблицы 1 показал, что дробный ПИД-регулятор эффективней ПИД-регулятора по большинству показателей качества, в особенности по интегральной оценке I0. При использовании дробного ПИД-регулятора время переходного процесса уменьшается на 33%, значение интегральной оценки качества уменьшается в среднем на 11,5%, заброс частоты уменьшается на 144% по сравнению с моделью с ПИД-регулятором. Указанные преимущества дробного ПИД-регулятора достигаются путем управления связью между забросом частоты и быстродействием с помощью параметров α и β.
Рис. 3. Имитационная модель с дробным ПИД и ПИД-регуляторами
Таблица 1
Значения качественных показателей, полученные в результате эксперимента
|
параметры α= 0,9999 и β=0,5 |
||||||
|
Δw, % |
h(∞) |
tp, мc |
Δε |
I0 |
η, % |
|
|
ПИД |
5,6 |
700 |
310,9 |
0 |
4,5277e+6 |
5,2 |
|
Дробн. ПИД |
5,2 |
770 |
307 |
0 |
4,2975 e+6 |
|
|
параметры α= 0,5и β=0,9999 |
||||||
|
Δw, % |
h(∞) |
tp, мc |
Δε |
I0 |
η, % |
|
|
ПИД |
5,6 |
770 |
310,9 |
0 |
4,5277e+6 |
5,6 |
|
Дробн. ПИД |
1,4 |
770,7 |
169,3 |
0,7 |
4,2775e+6 |
|
а) 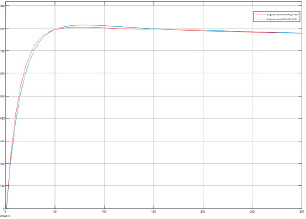
б) 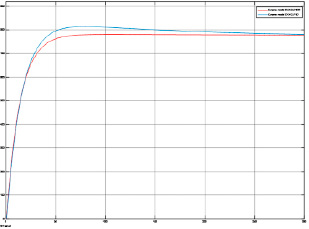
Рис. 4. Влияние параметров α и β в дробном ПИД-регуляторе: а) α = 0,9999, β=0,5, б) α = 0,5, β=0,9999
Таблица 2
Результаты исследования
|
KП |
TИ |
TД |
α |
β |
Δw, % |
tp, c |
Q, м3/ч |
|
|
ПИД |
2 |
0,01 |
0,005 |
– |
– |
8,3 |
2,46 |
0.0057 |
|
Дробн. ПИД |
2 |
0,01 |
0,005 |
0,43 |
0,68 |
3,4 |
2,31 |
0.0053 |
Исследование, сопровождавшееся пятикратным повторением каждого эксперимента при одинаковых начальных условиях для обоих типов регуляторов, показало, что дробный ПИД-регулятор более экономичен по расходу топлива (табл. 2), экономия топлива при применении системы управления с дробным ПИД-регулятором составила 7,02% по сравнению с обычным ПИД-регулятором при остальных равных условиях.
Как следует из таблицы 2, экономия топлива достигается за счет уменьшения взаимосвязи между забросом частоты Δw и временем переходного процесса tp. Изучение дробного ПИД-регулятора на лабораторной установке показывает, что его применение обеспечивает 1 класс точности регулирования по частоте вращения в соответствии с ГОСТ 55231-2012.
Результаты исследования и их обсуждение
Проведенные исследования по применению дробного ПИД-регулятора, основанные на алгоритмах дробного ПИД-управления в цифровой системе автоматического управления электростанции на базе двигателя Д-242 в модельном виде, выявили, что в среднем заброс частоты вращения коленчатого вала над целевым значением уменьшился на 45,5%, снизились показатели времени переходного процесса и интегральной оценки качества на 33,3% и 6,8% соответственно.
В ходе эмпирических исследований выявлено, что расход топлива при использовании дробного ПИД-регулятора уменьшился в среднем на 7,02% относительно ПИД-регулятора в условиях повышения быстродействия и точности поддержания частоты вращения коленчатого вала.
Заключение
Исследование характеристик газодизельной модели САУ с дробным и обычным ПИД-регуляторами поддержания частоты вращения коленчатого вала газодизельной установки электростанции показало, что дробный ПИД-регулятор обладает большей эффективностью и может применяться для регулирования в энергетических установках.
Библиографическая ссылка
Авсиевич А.В., Авсиевич В.В., Буштрук Т.Н., Ульянов А.Д., Буштрук А.А. СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОСТАНЦИЕЙ РЕГУЛЯТОРОМ НЕЦЕЛОГО ПОРЯДКА // Современные наукоемкие технологии. 2023. № 6. С. 14-19;URL: https://top-technologies.ru/ru/article/view?id=39625 (дата обращения: 03.07.2026).
DOI: https://doi.org/10.17513/snt.39625